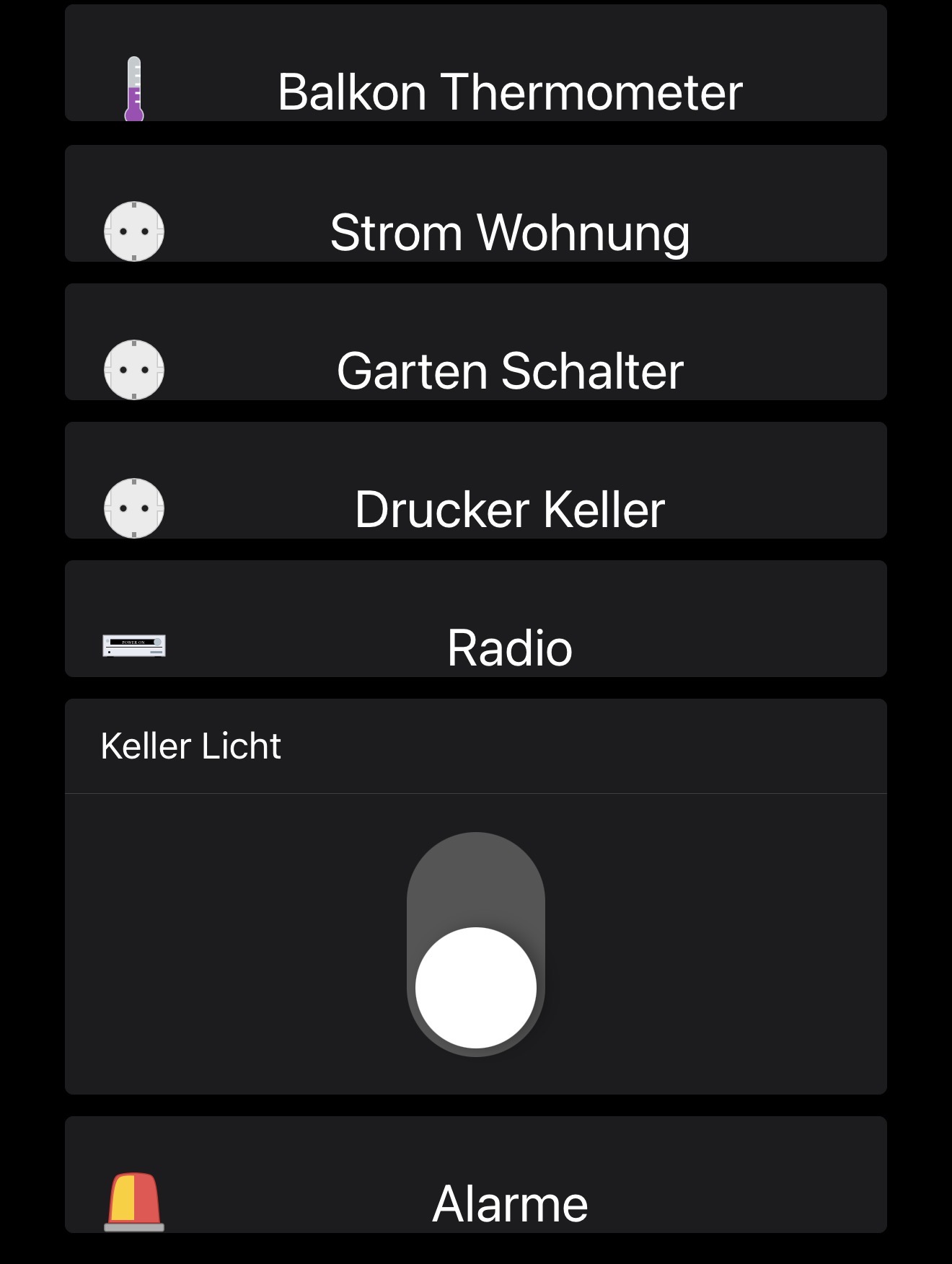
Jetzt muss ich nicht mehr im dunkelen durch den Keller gehen wenn ich etwas in beiden Händen halte.


Jetzt muss ich nicht mehr im dunkelen durch den Keller gehen wenn ich etwas in beiden Händen halte.
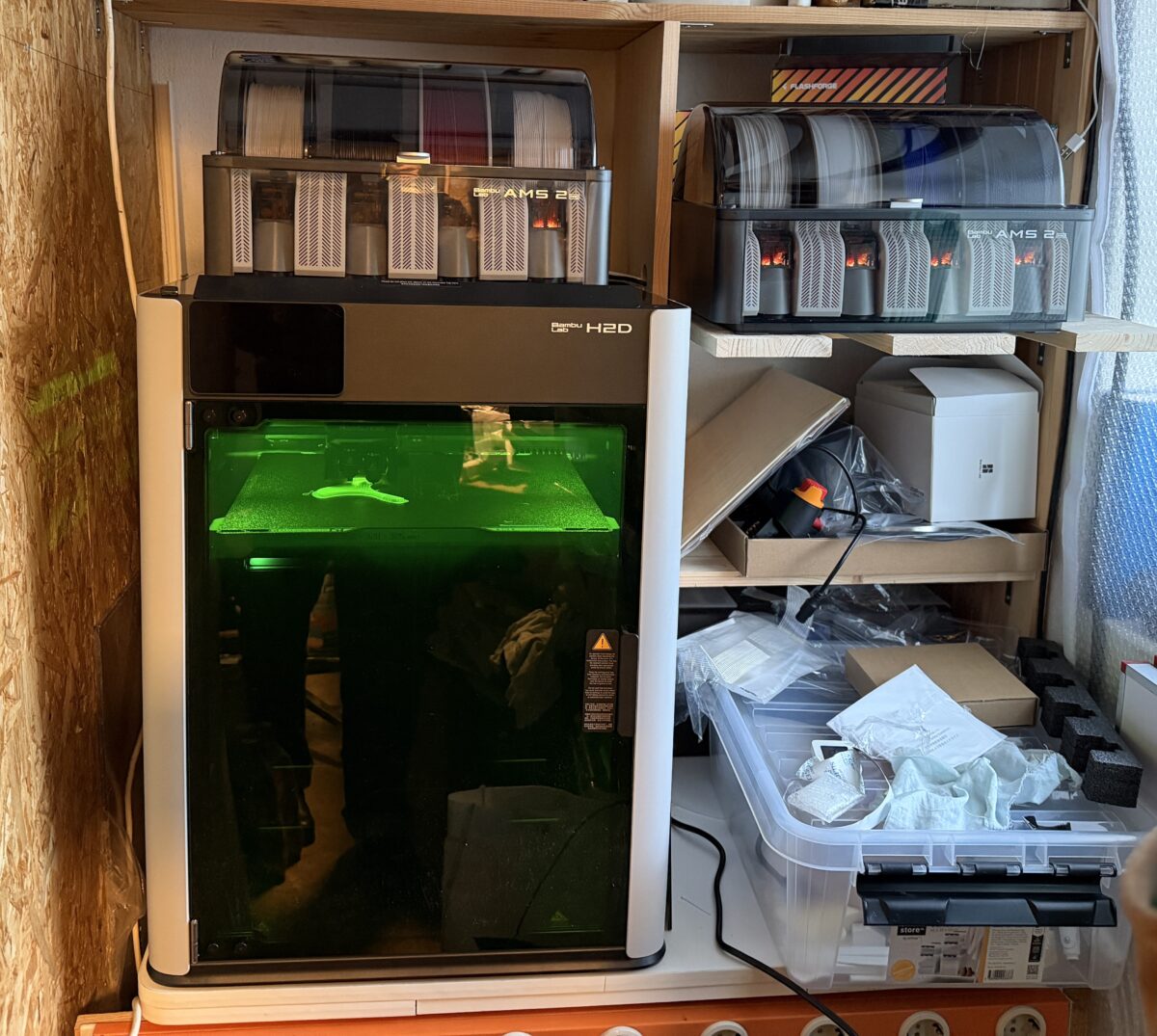
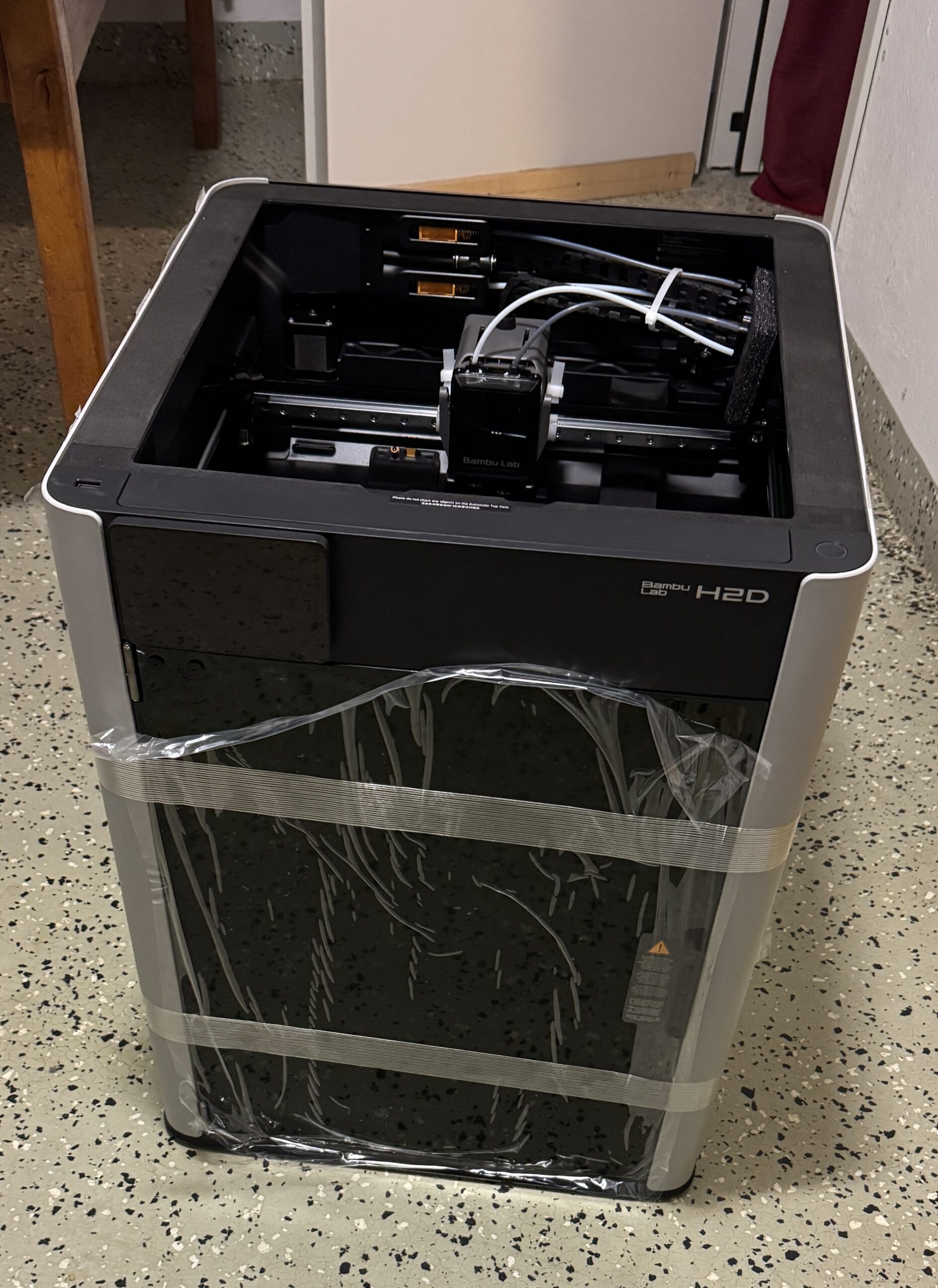
Der neue 3D Drucker H2D . Nach dem Eintreffen gleich ein 2. AMS bestellt, man gönnt sich ja sonst nichts







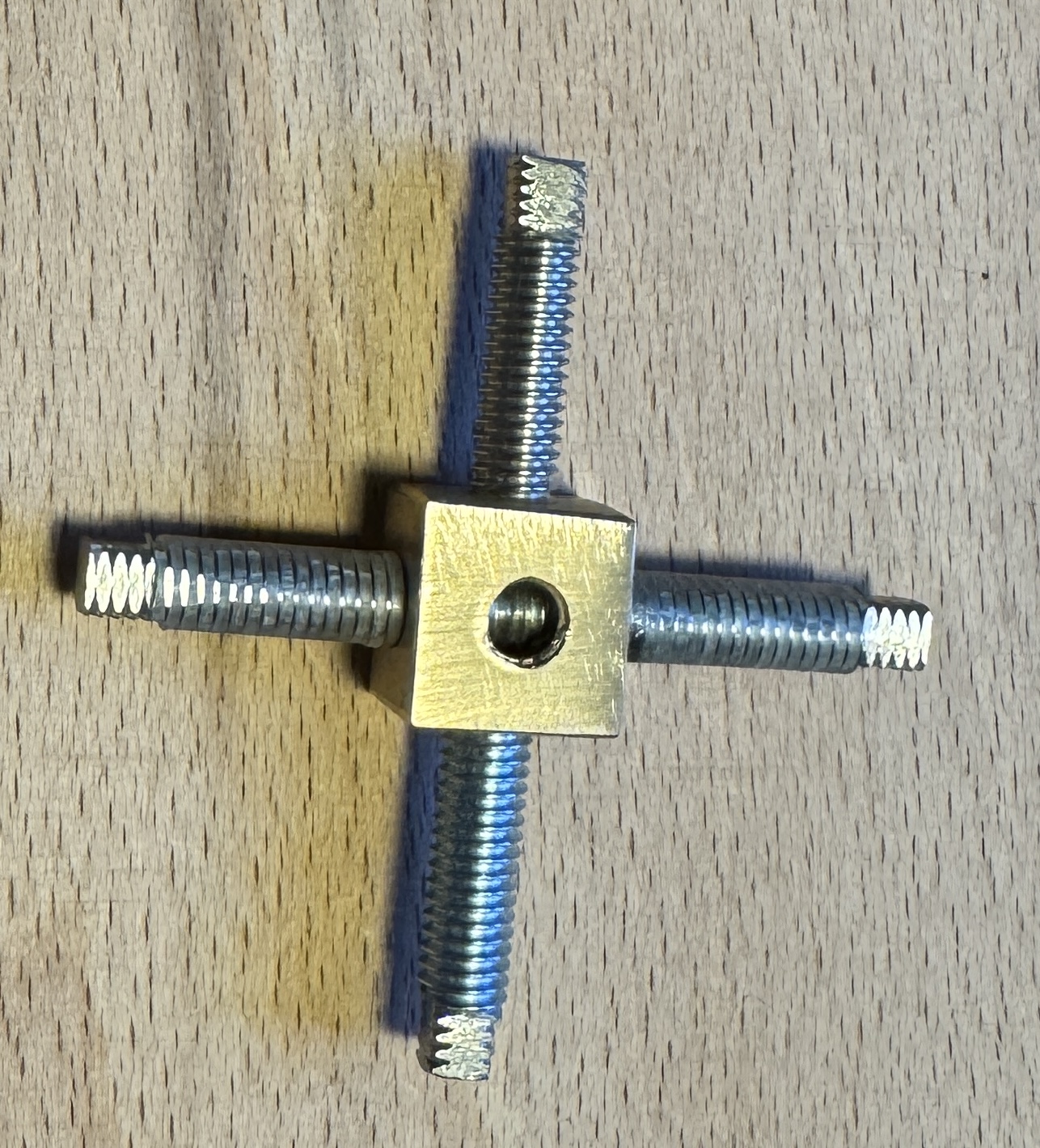
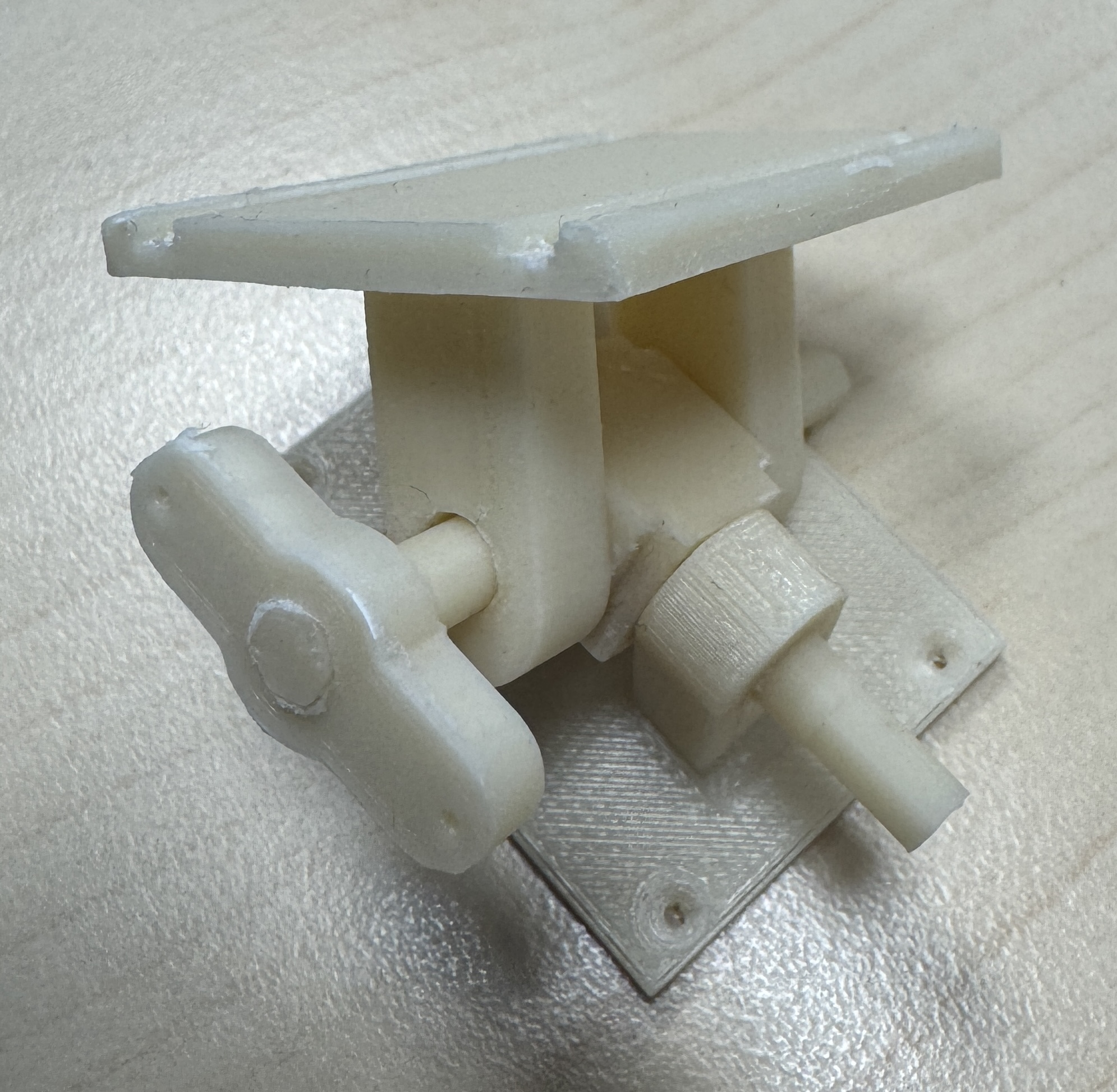
Das aus ABS gedruckte Kreuzgelenk hat sich im Bertrieb sehr oft verzogen.
Nuń habe ich es von einem verwandten Maschinenschlosser auf der Drehbank anfertigen lassen.




























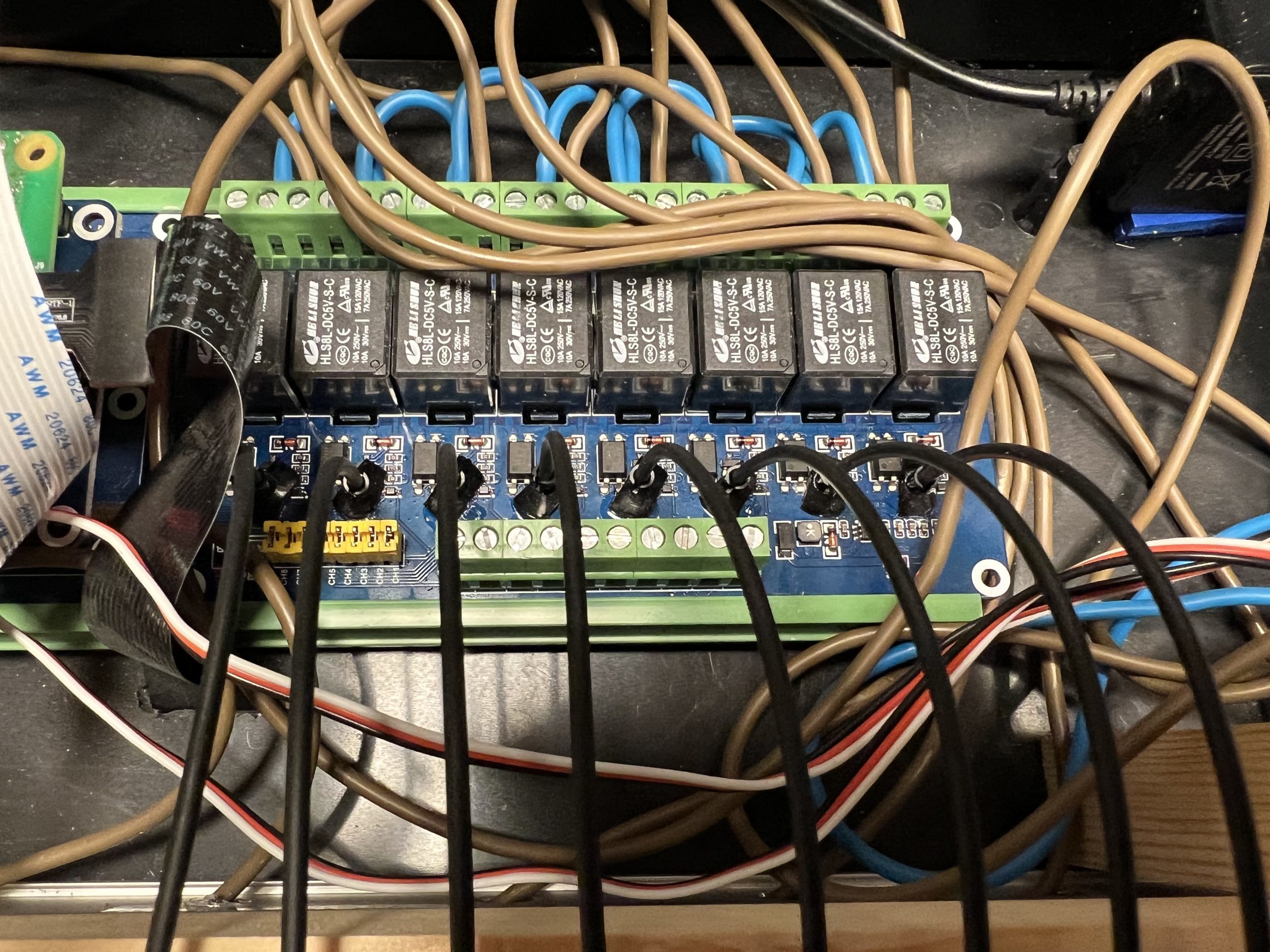

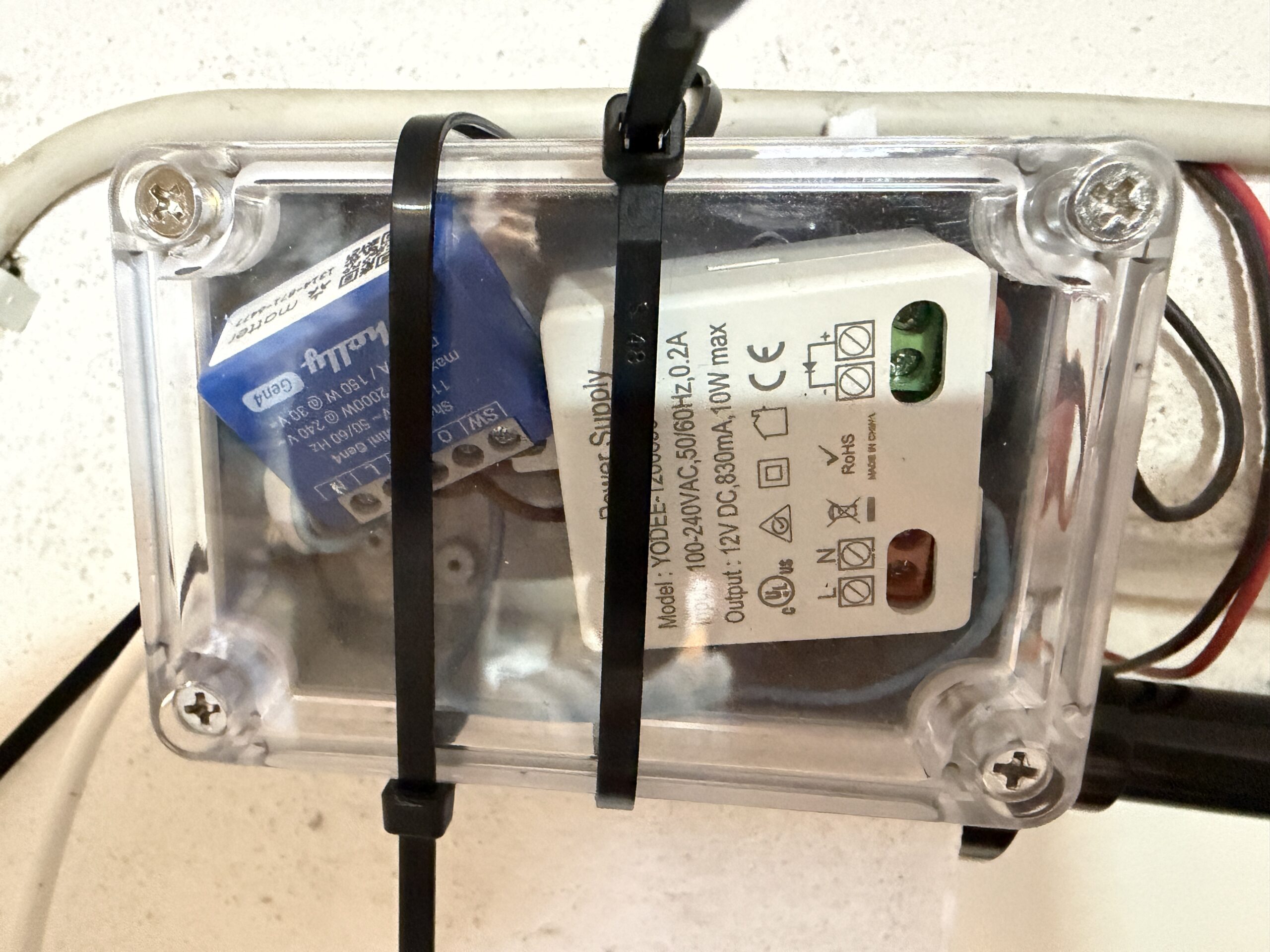
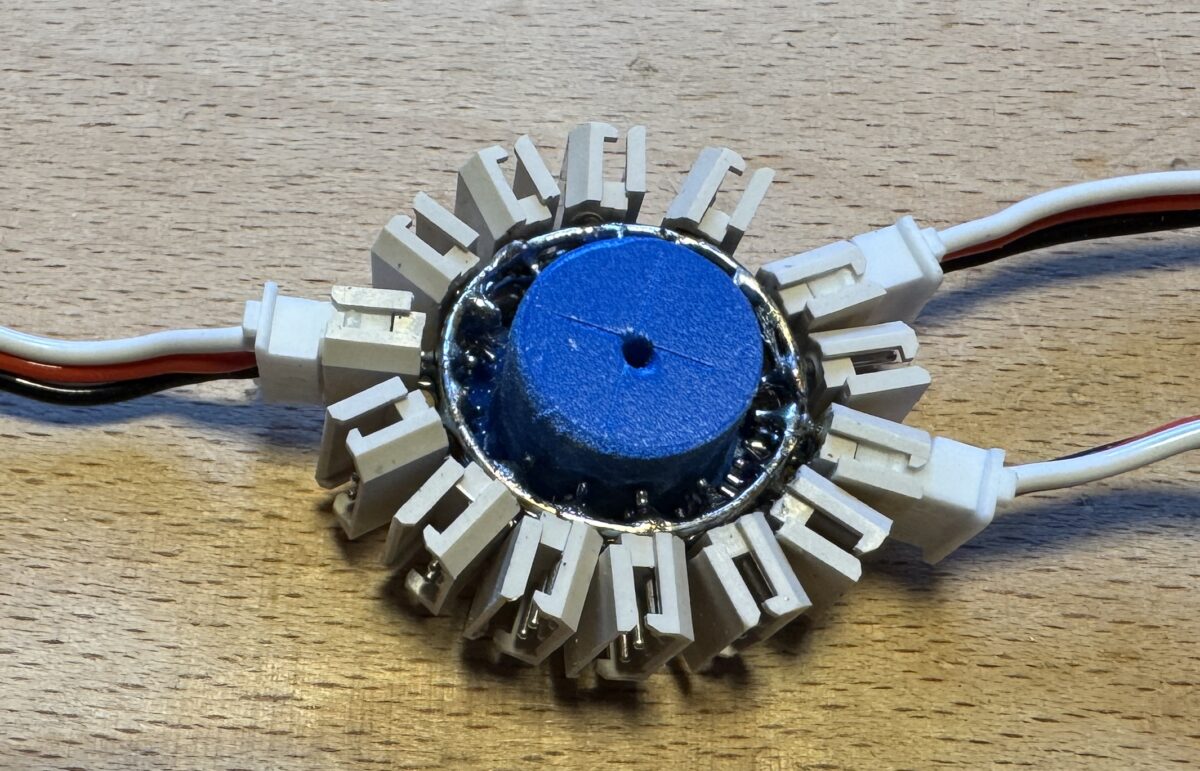
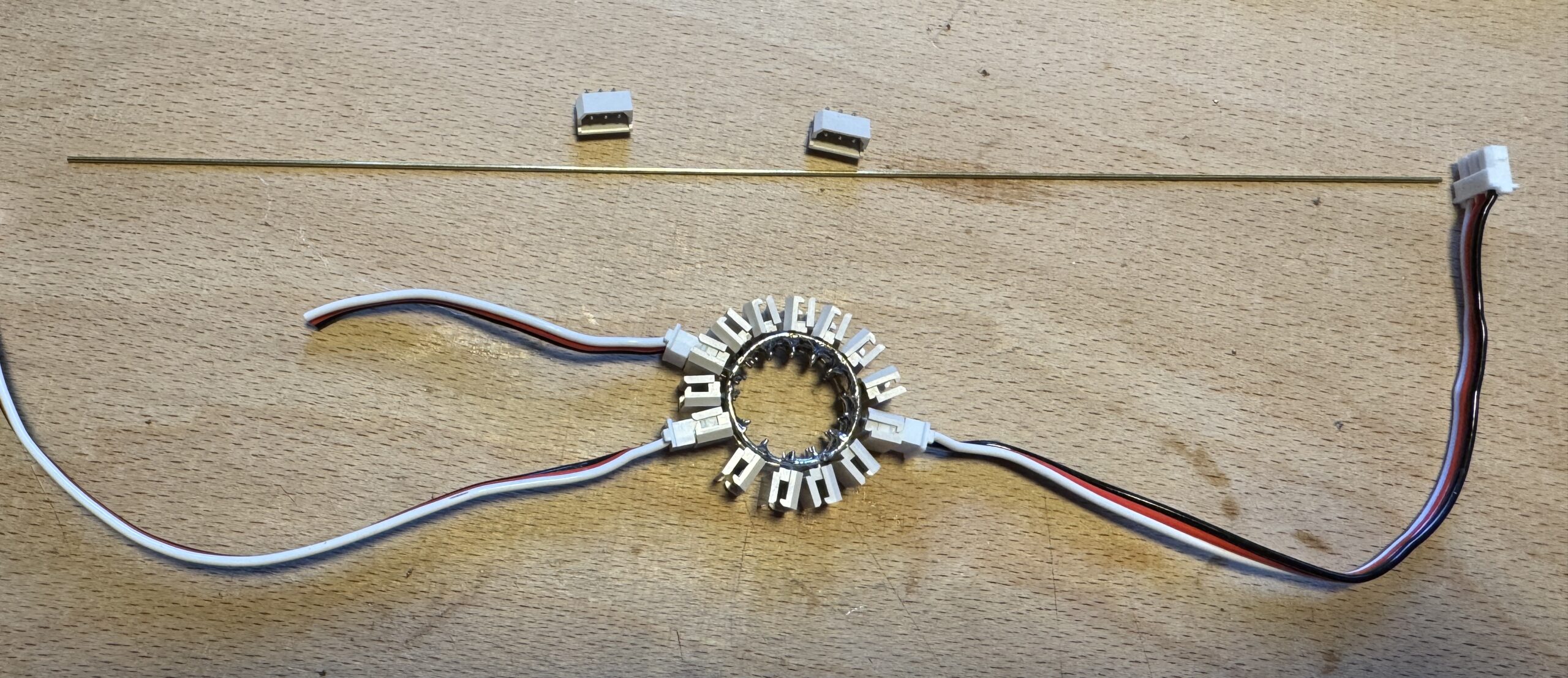
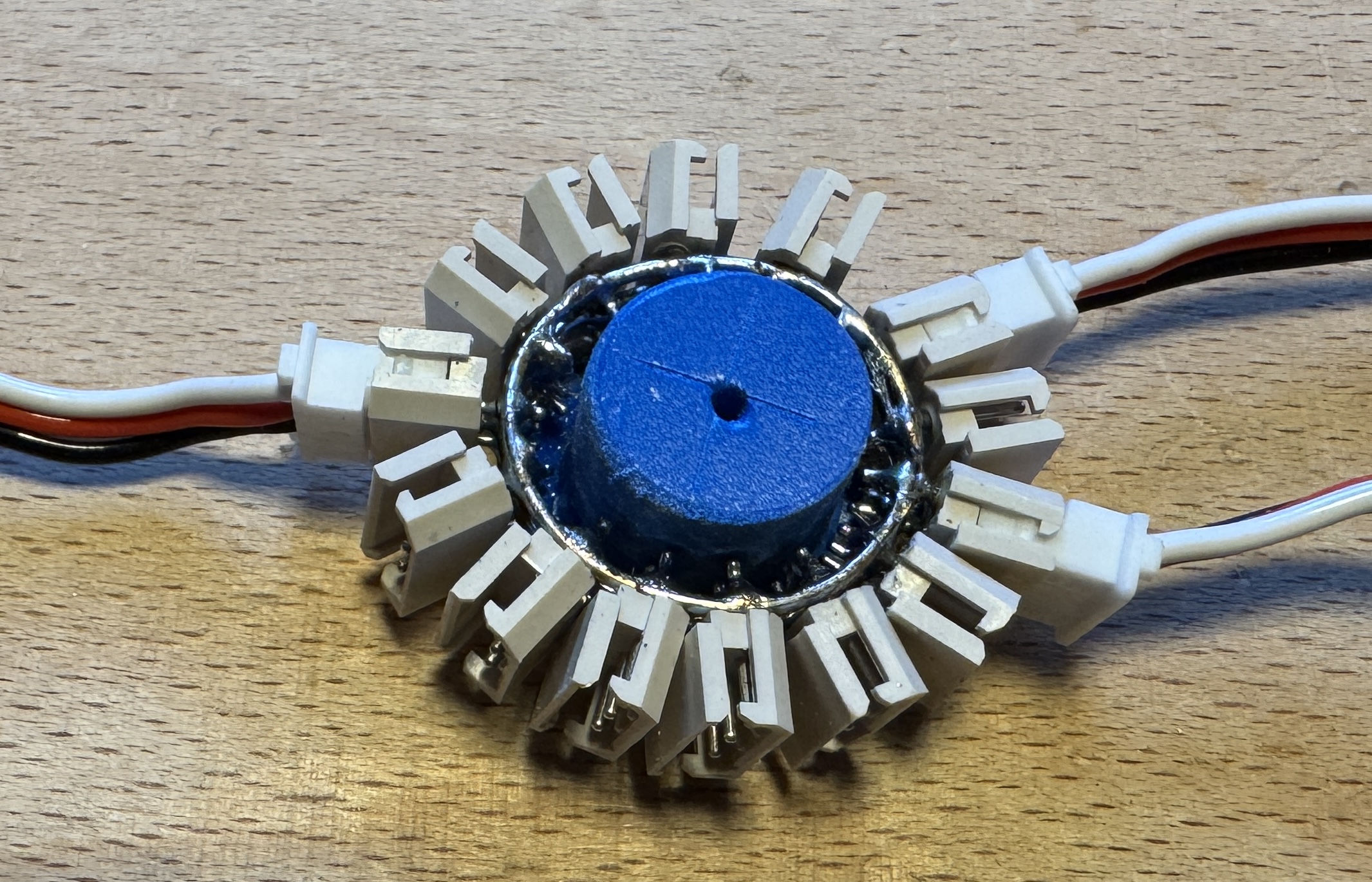
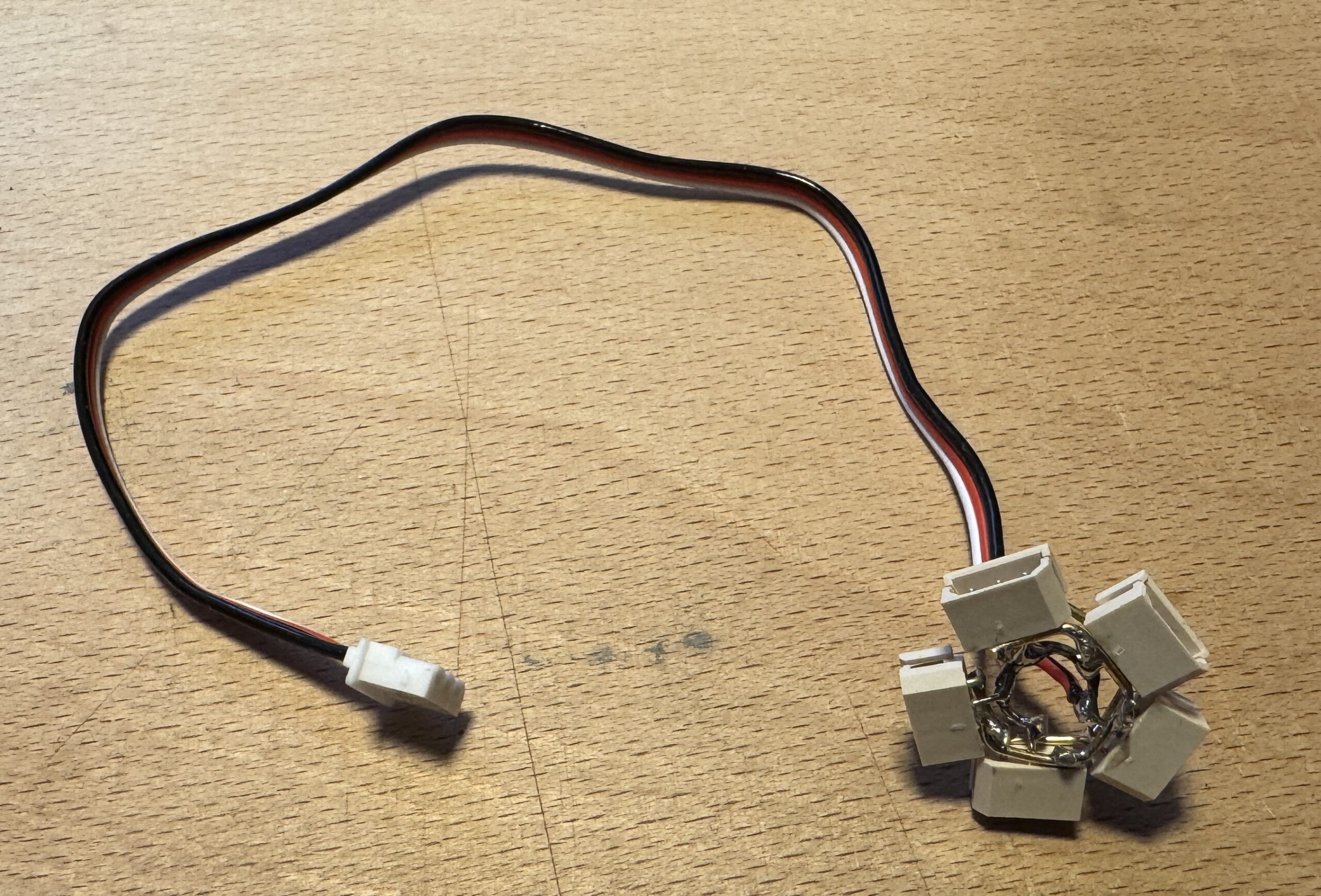
Da die Relais LED’s sowieso intern leuchten, war es nahliegend das Licht selbiger nach außen zu leiten.
Das ganze endet dann ab dem 27.02.2023 – 10.03.2023 in einem Spiegel Schrank, dann folgen weitere Beiträge 😉
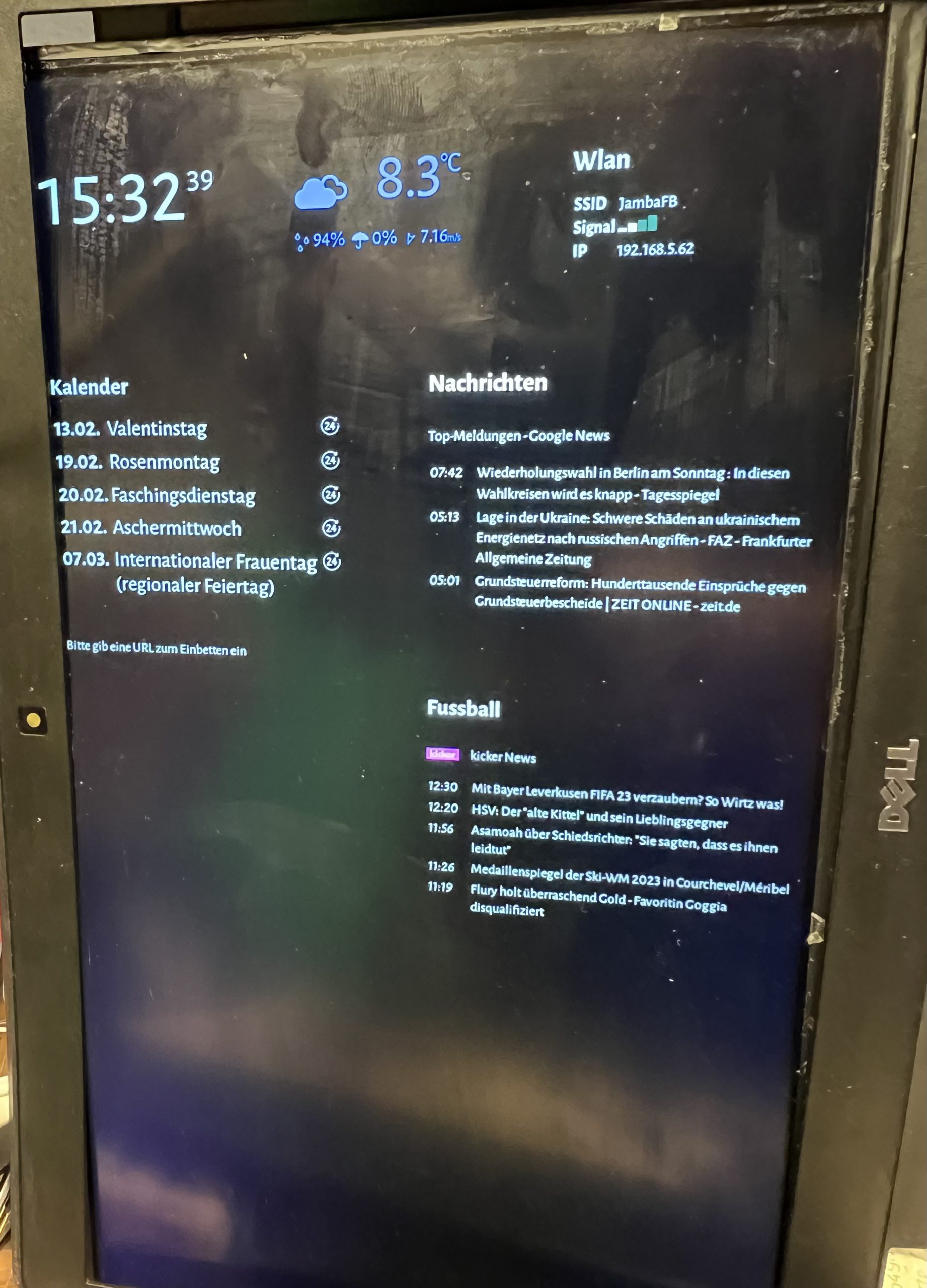
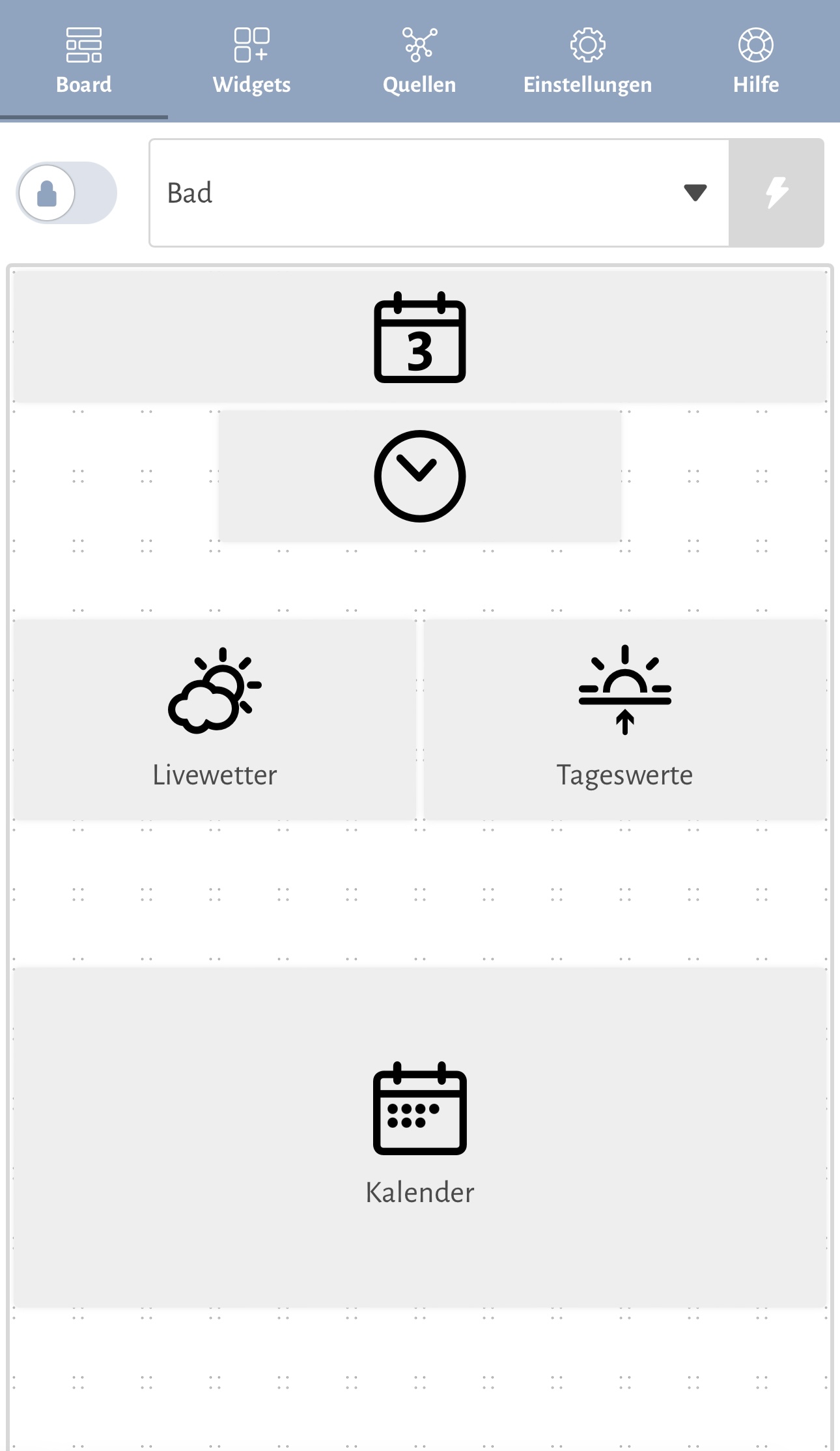
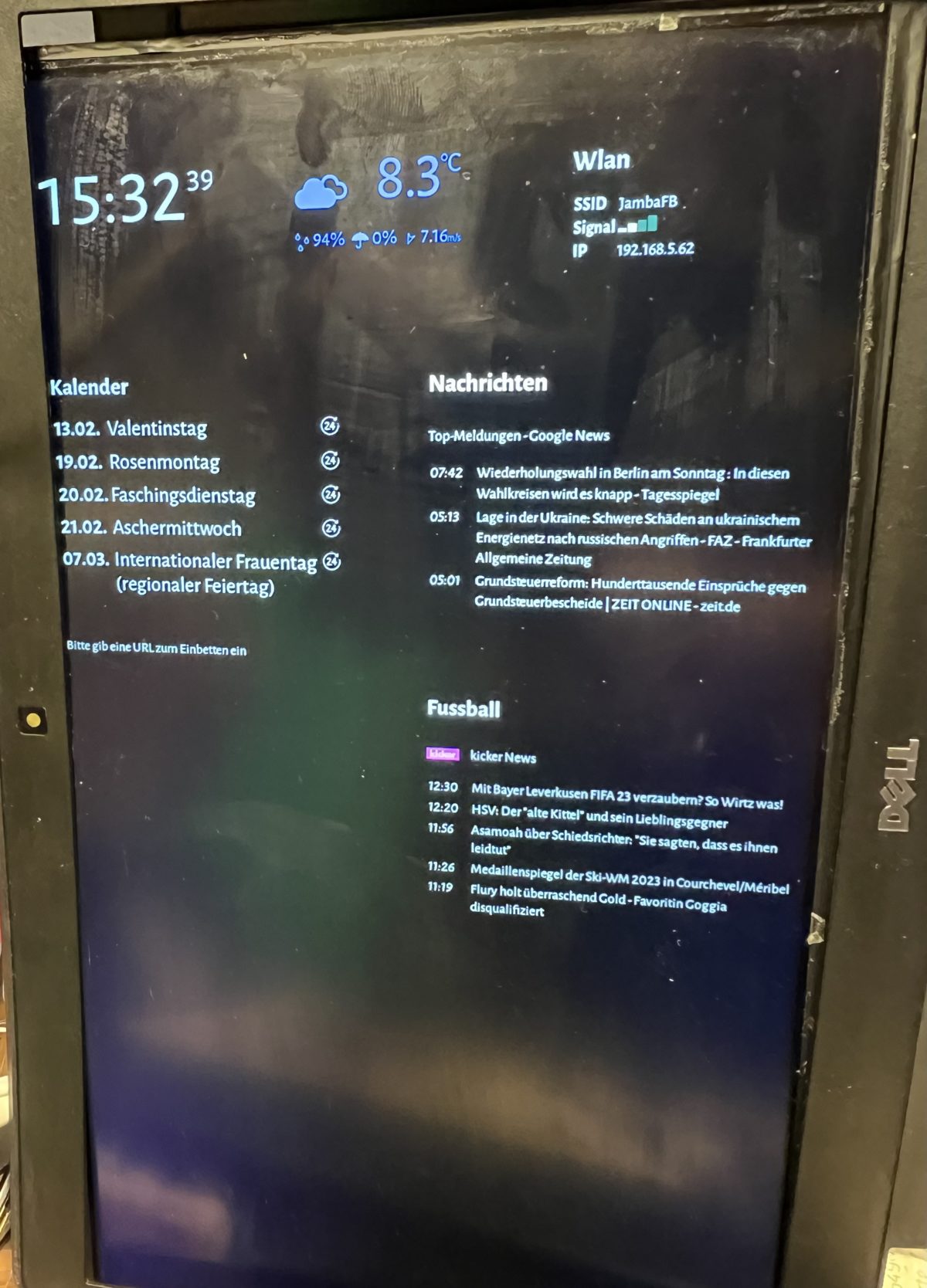
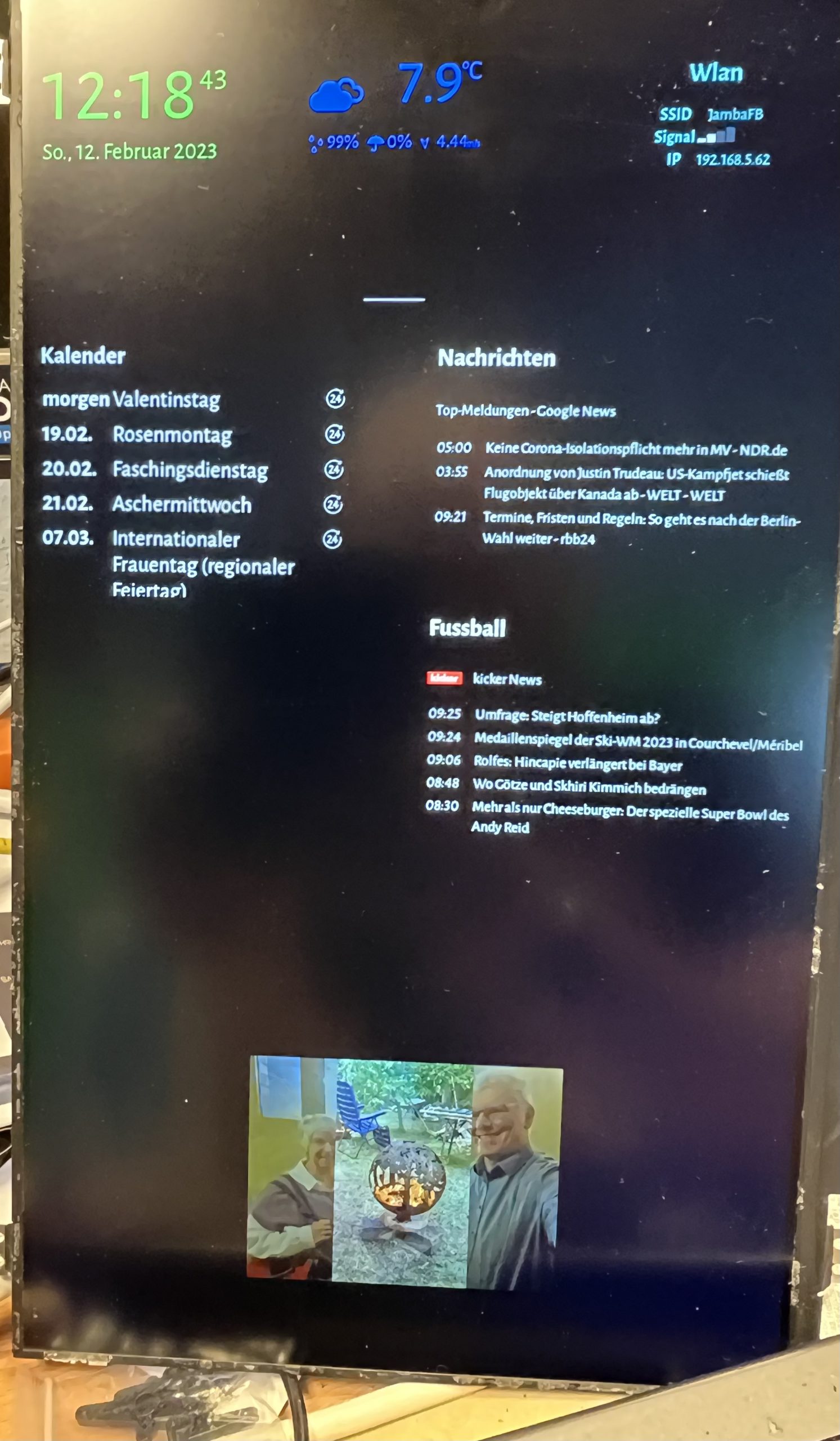
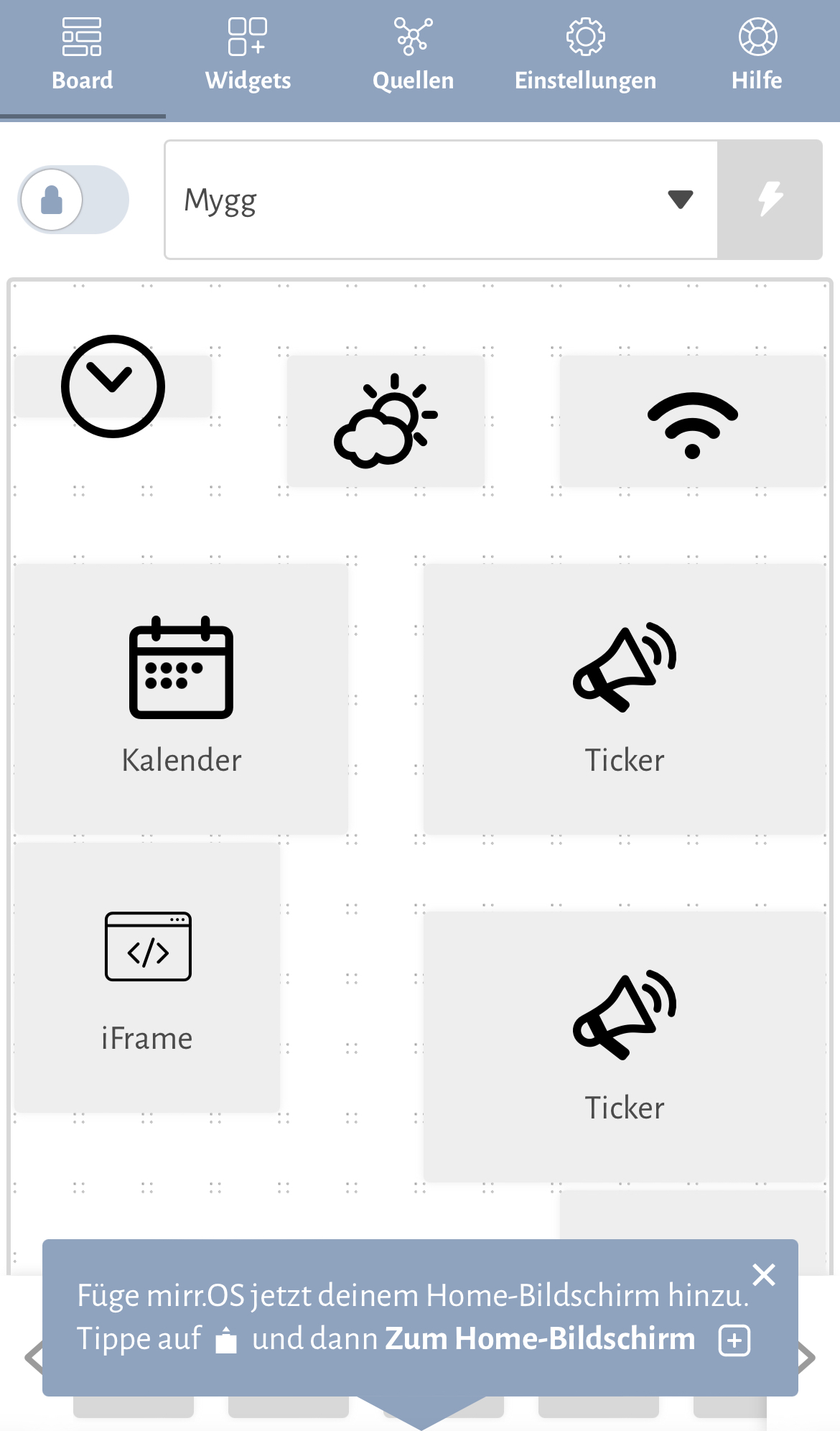
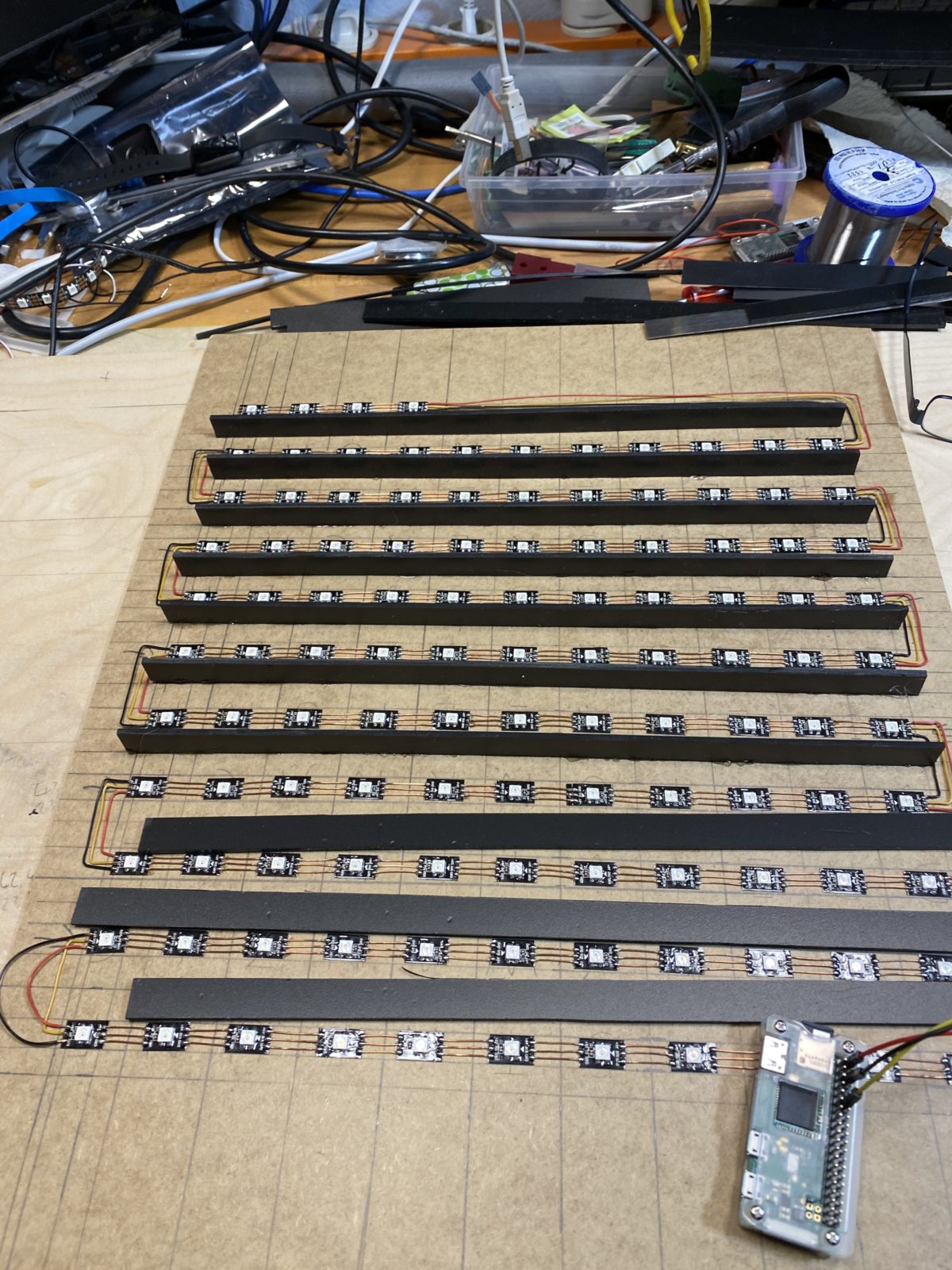
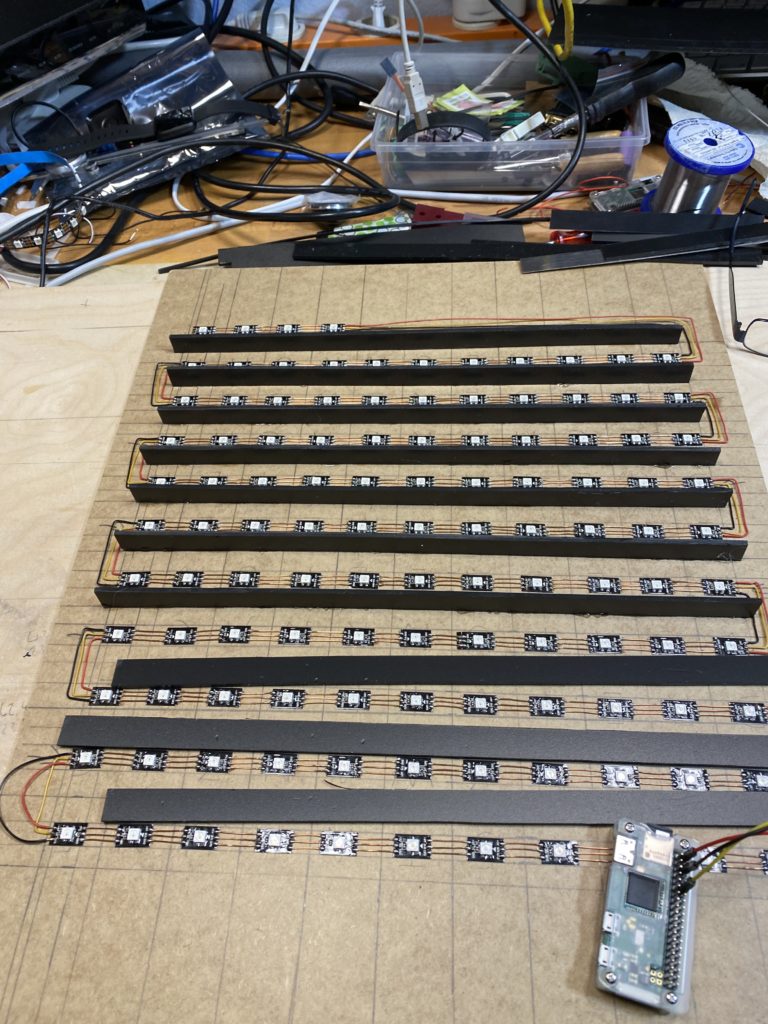
Das ganze wurde unter zu Hilfenahme der Software mirr.os für den Raspberry Pi gemacht.




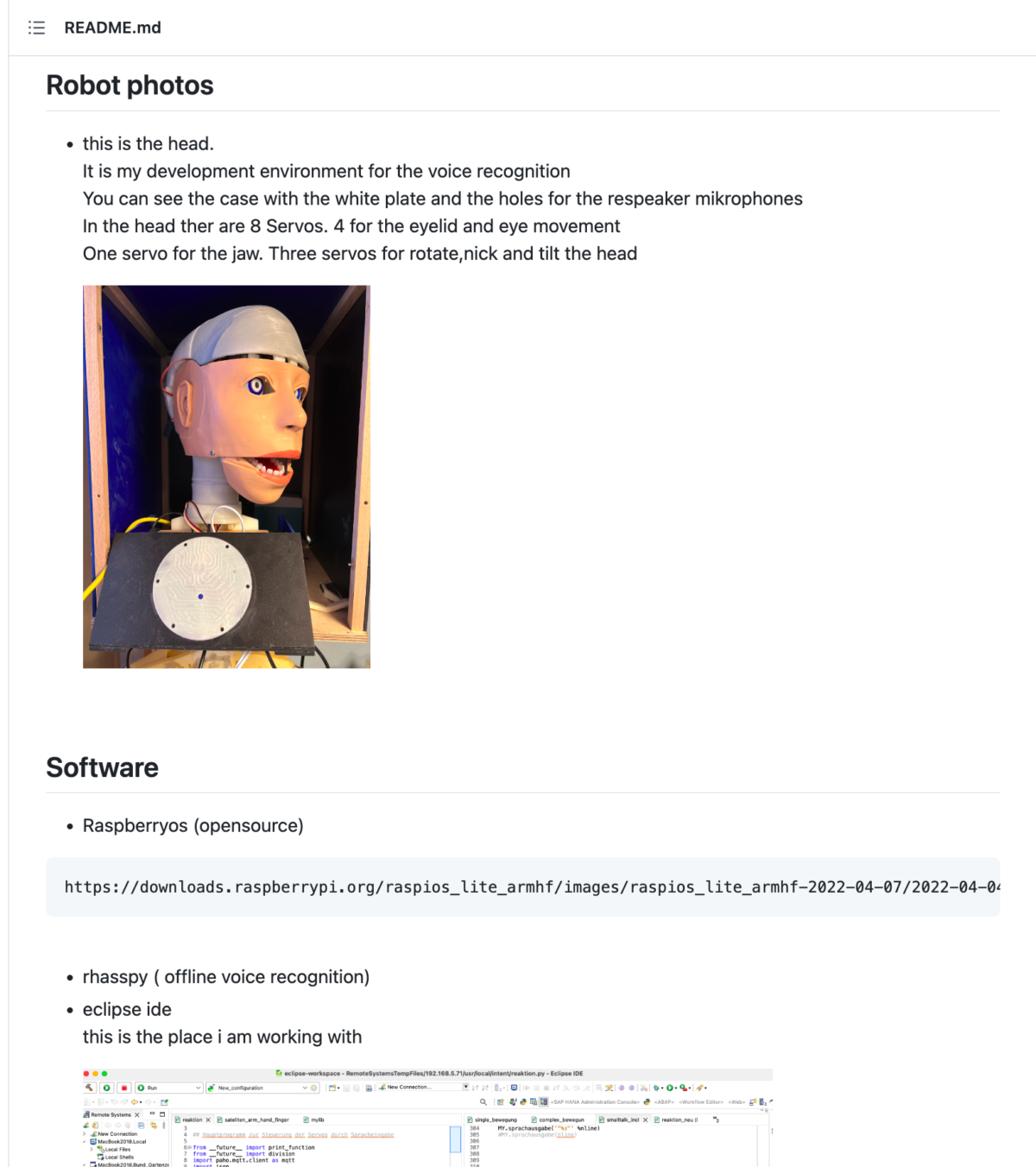
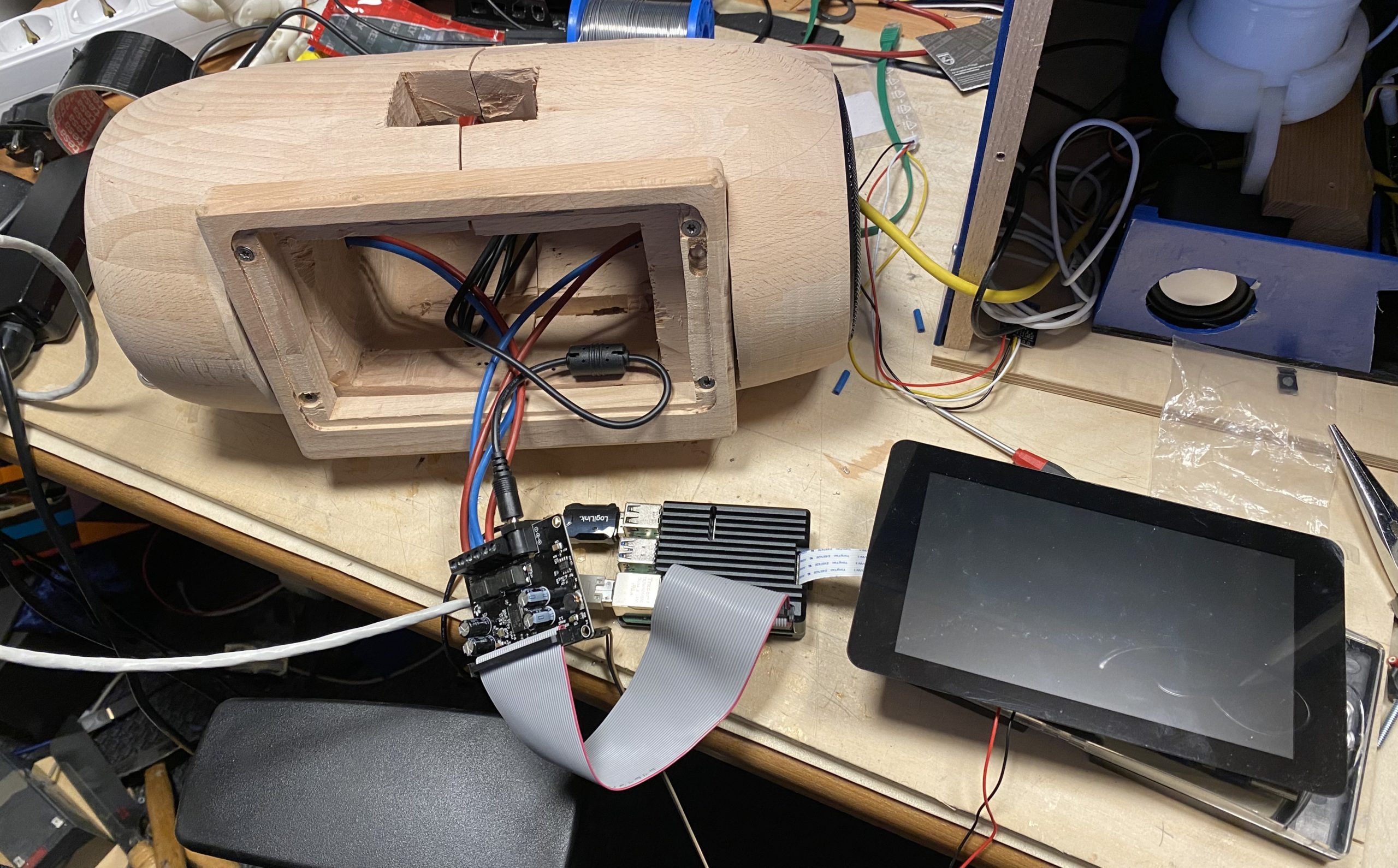
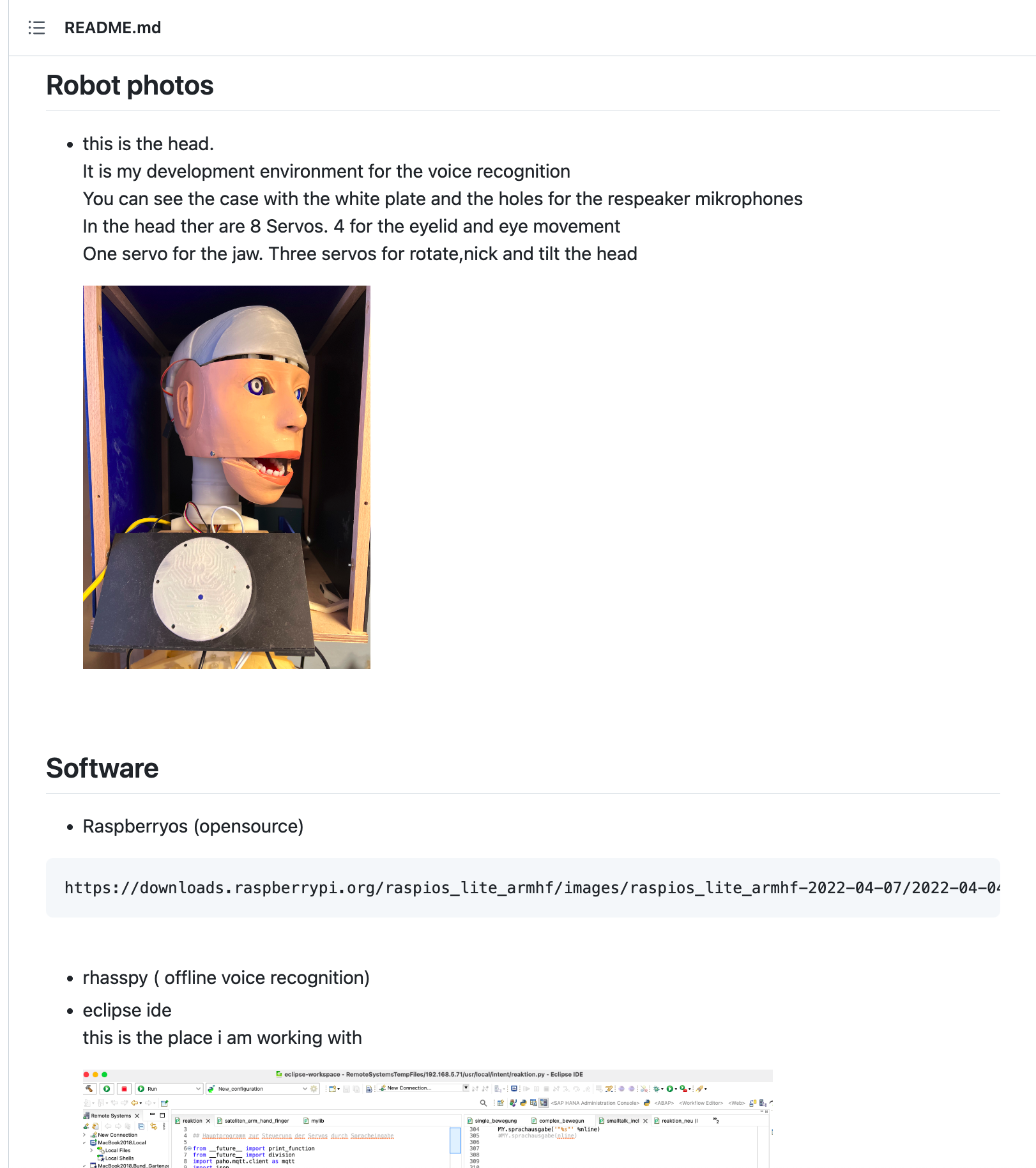
Das ist die Entwicklungsumgebung eclipse. Unten Links der Rpi Zero für die Hand. Darüber der RPi 4 mit der zentralen Spracherkennung






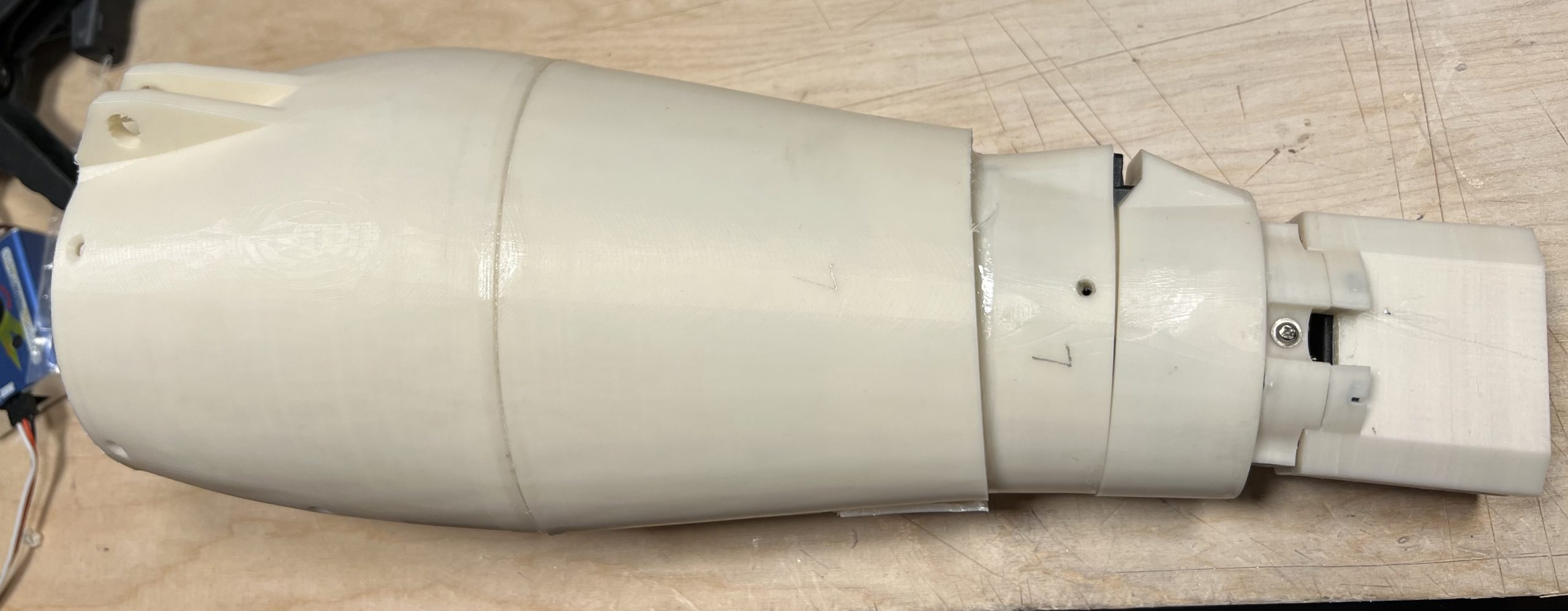
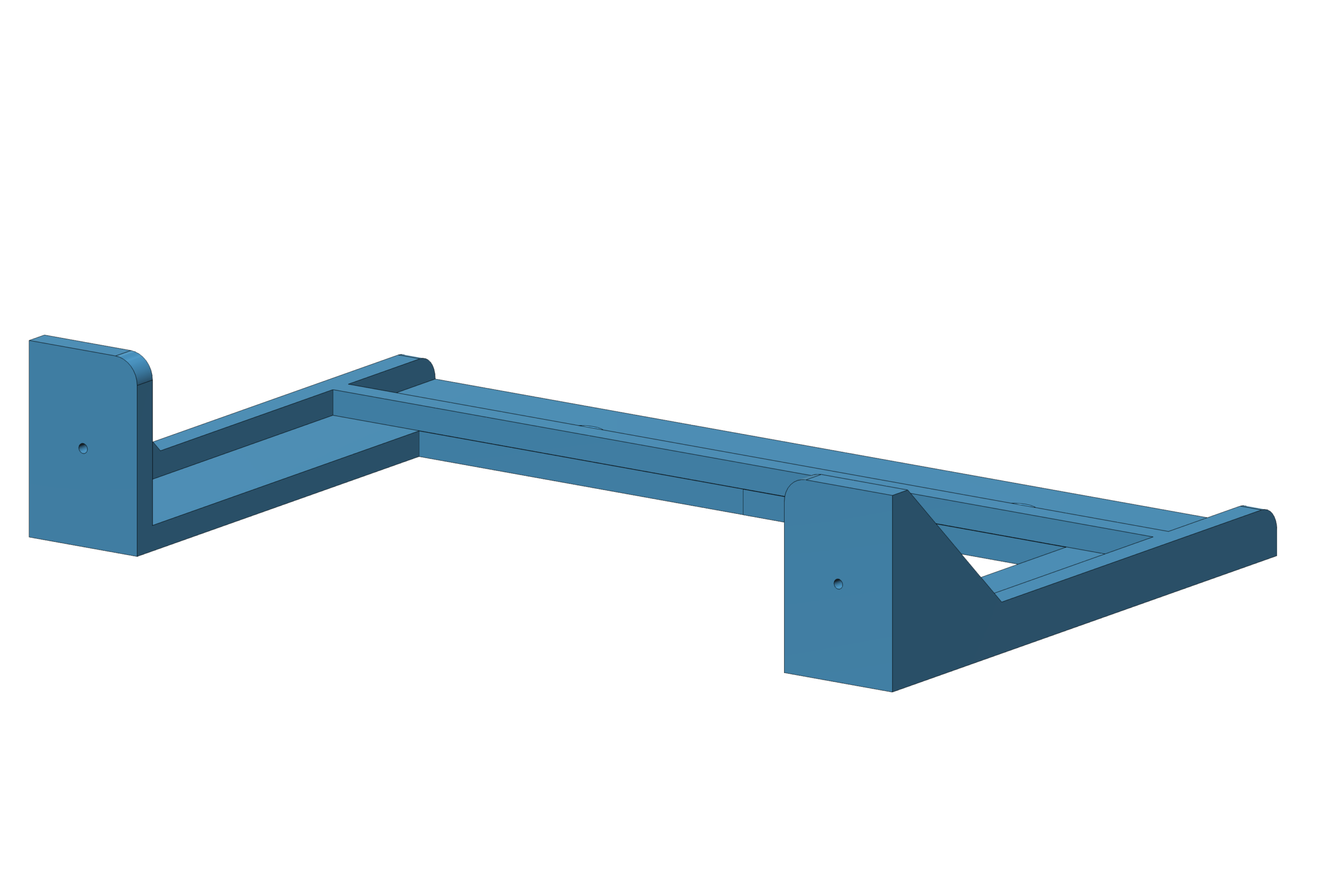
Ich habe den original Arm verändert damit der Klappmechanismus hinzugefügt werden kann ohne das sich die länge des Armes ändert




















Das kann man sich auch auf meiner Holzseite anschauen https://holz.mindach.net/index.php/2021/09/12/holz-und-technik-gemischt/
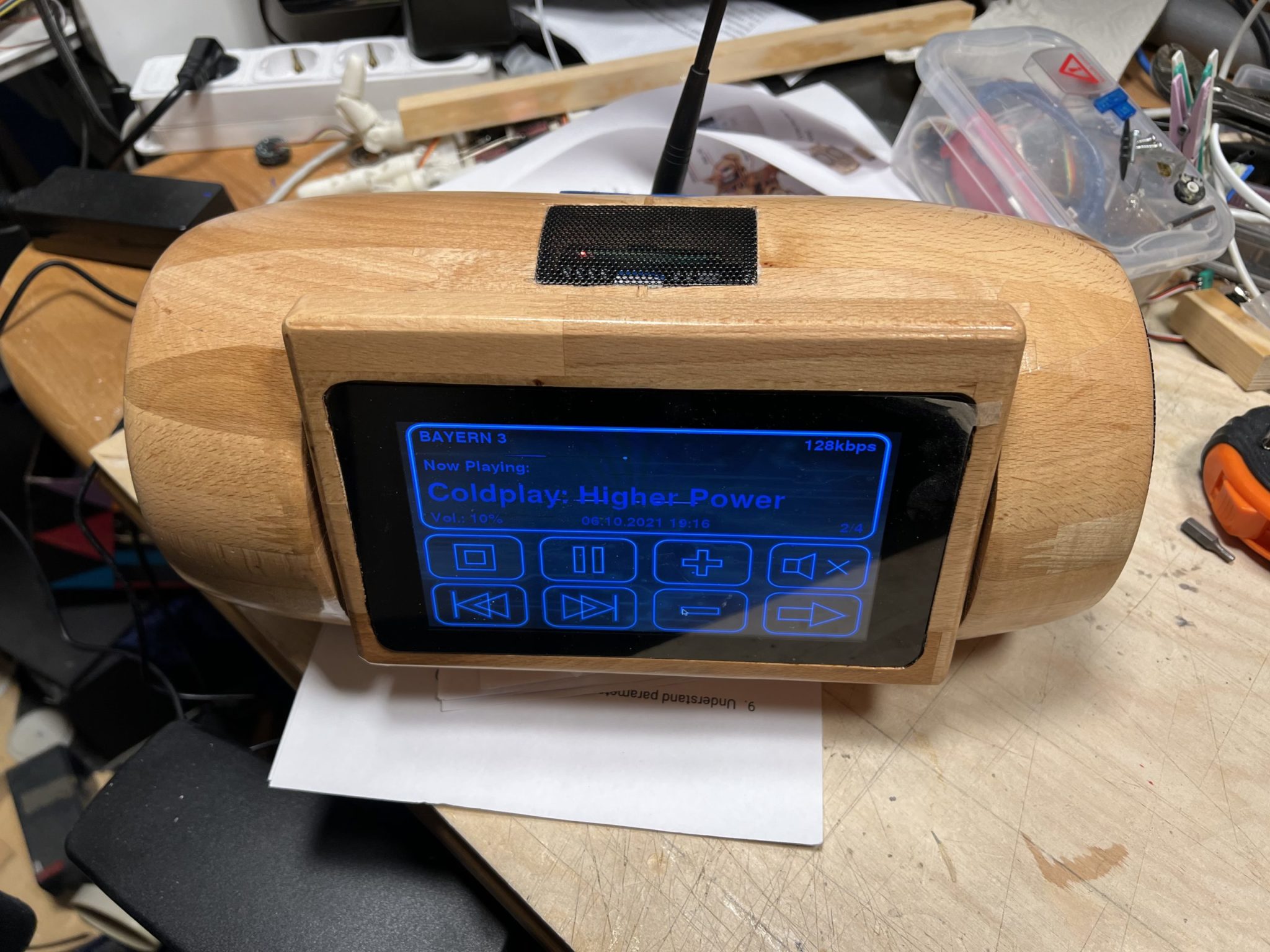




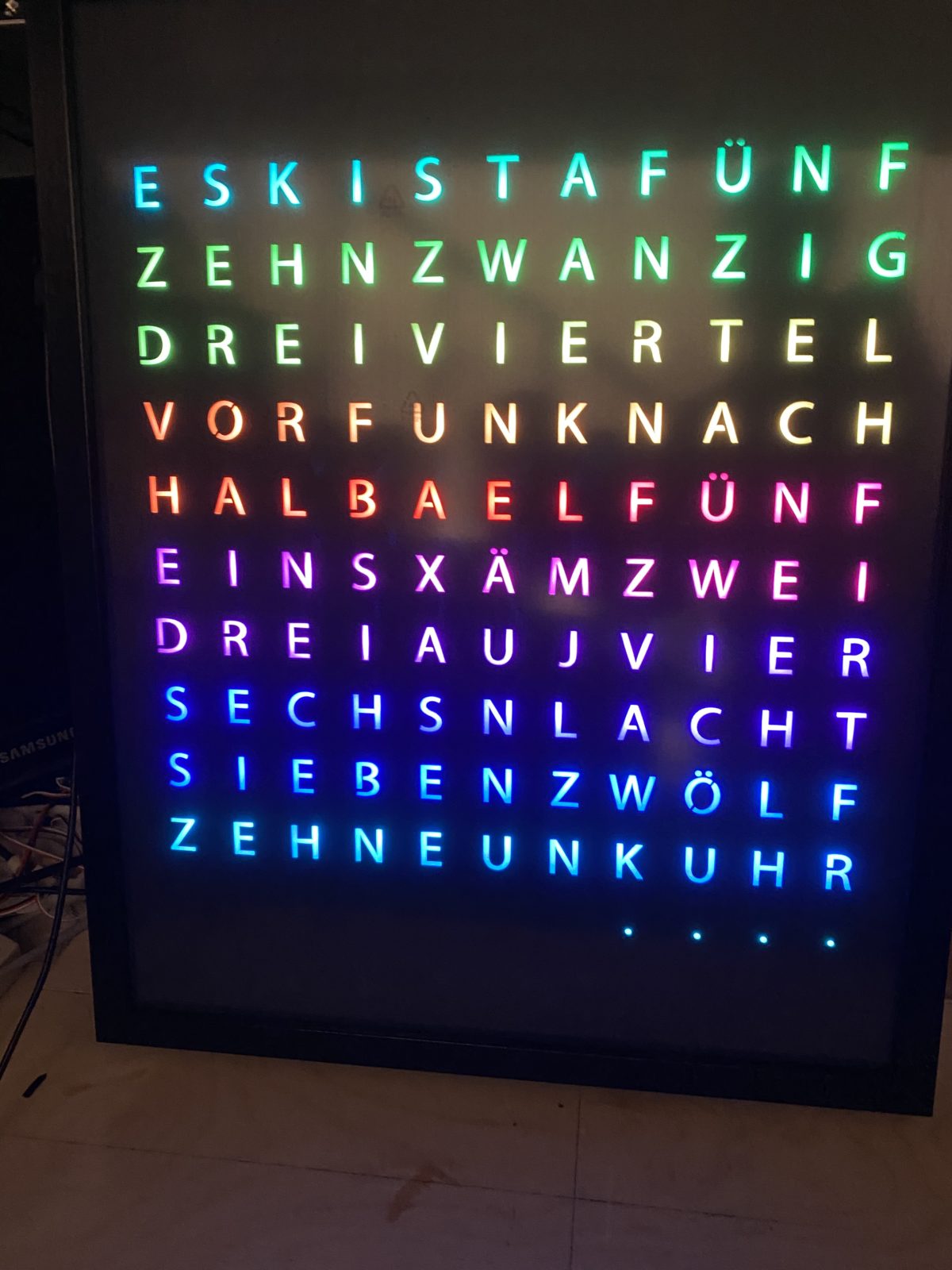

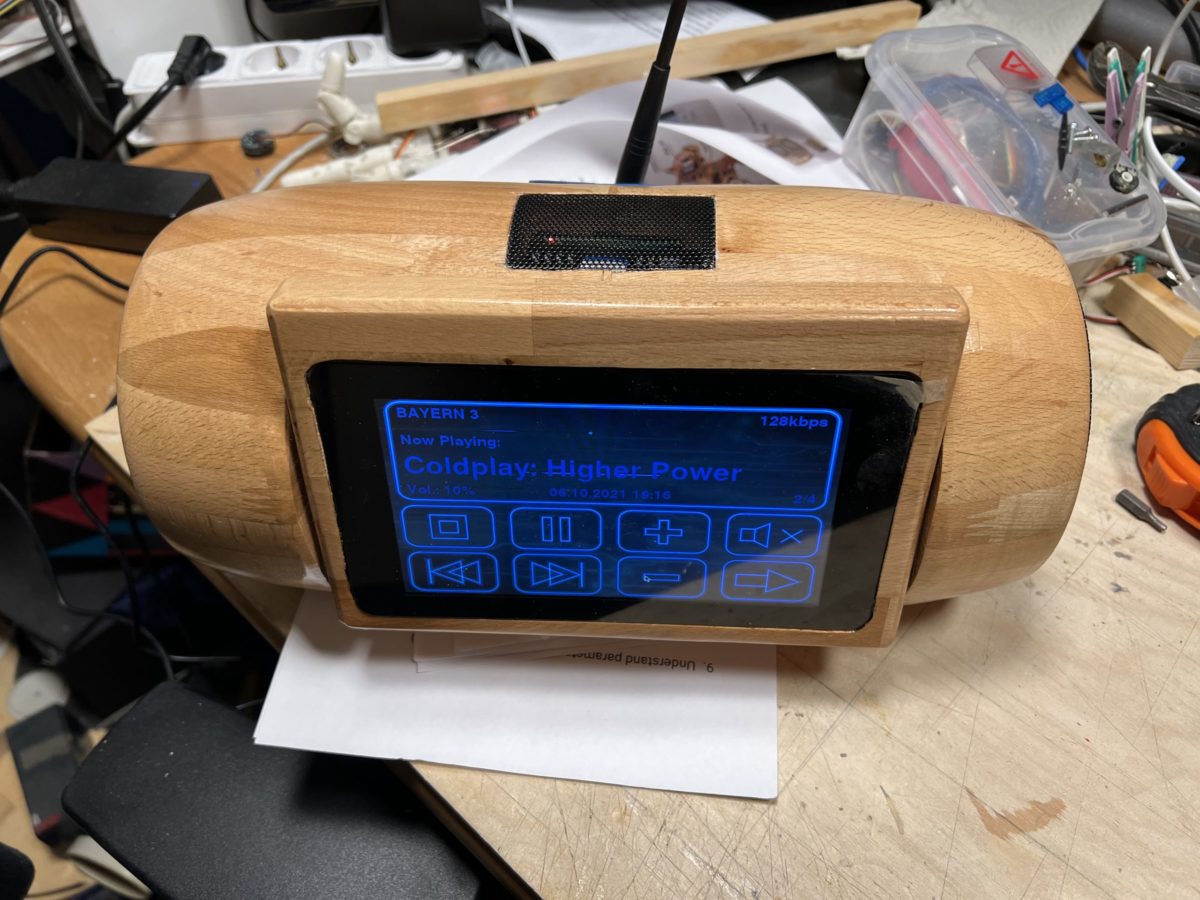
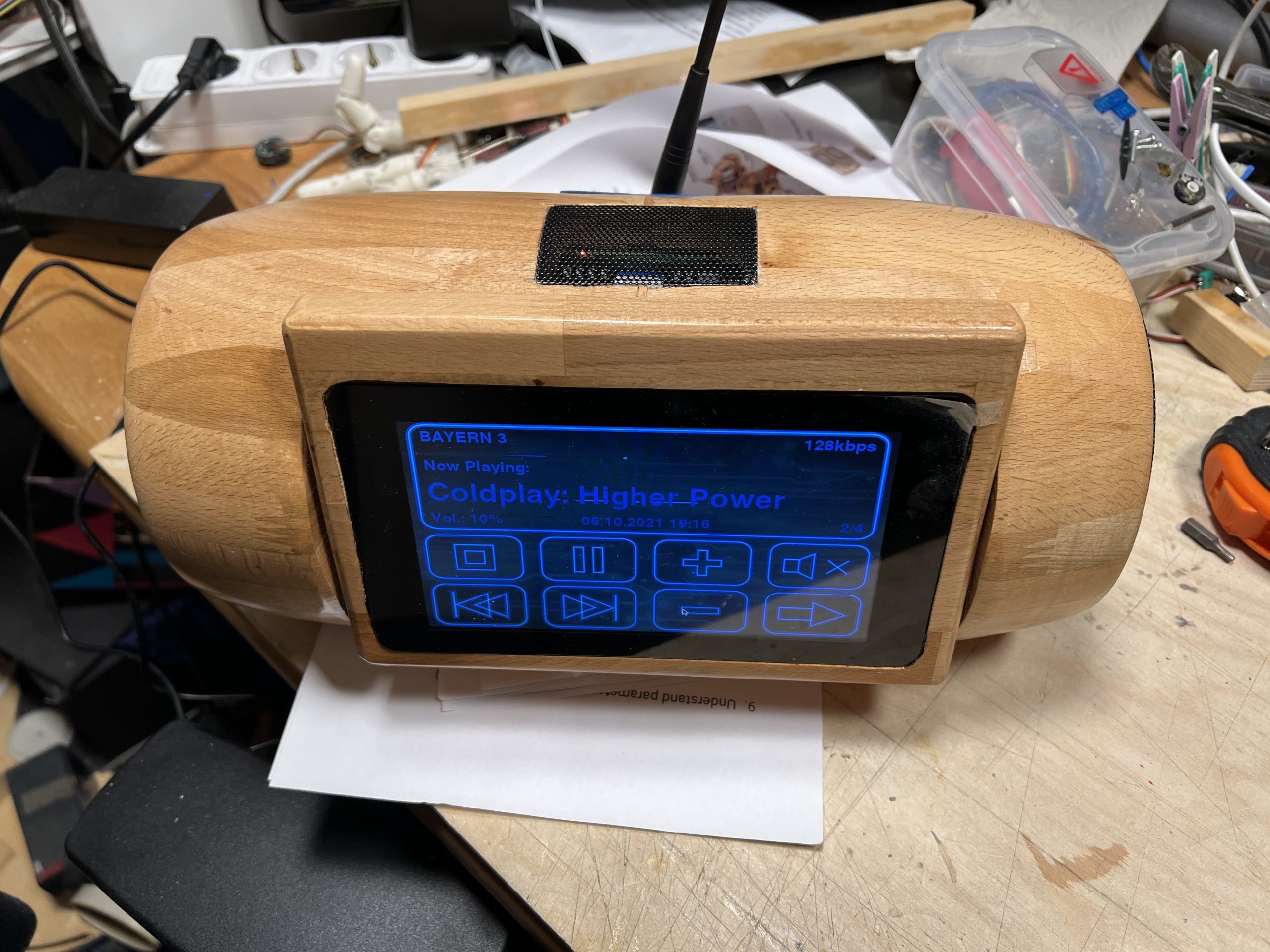
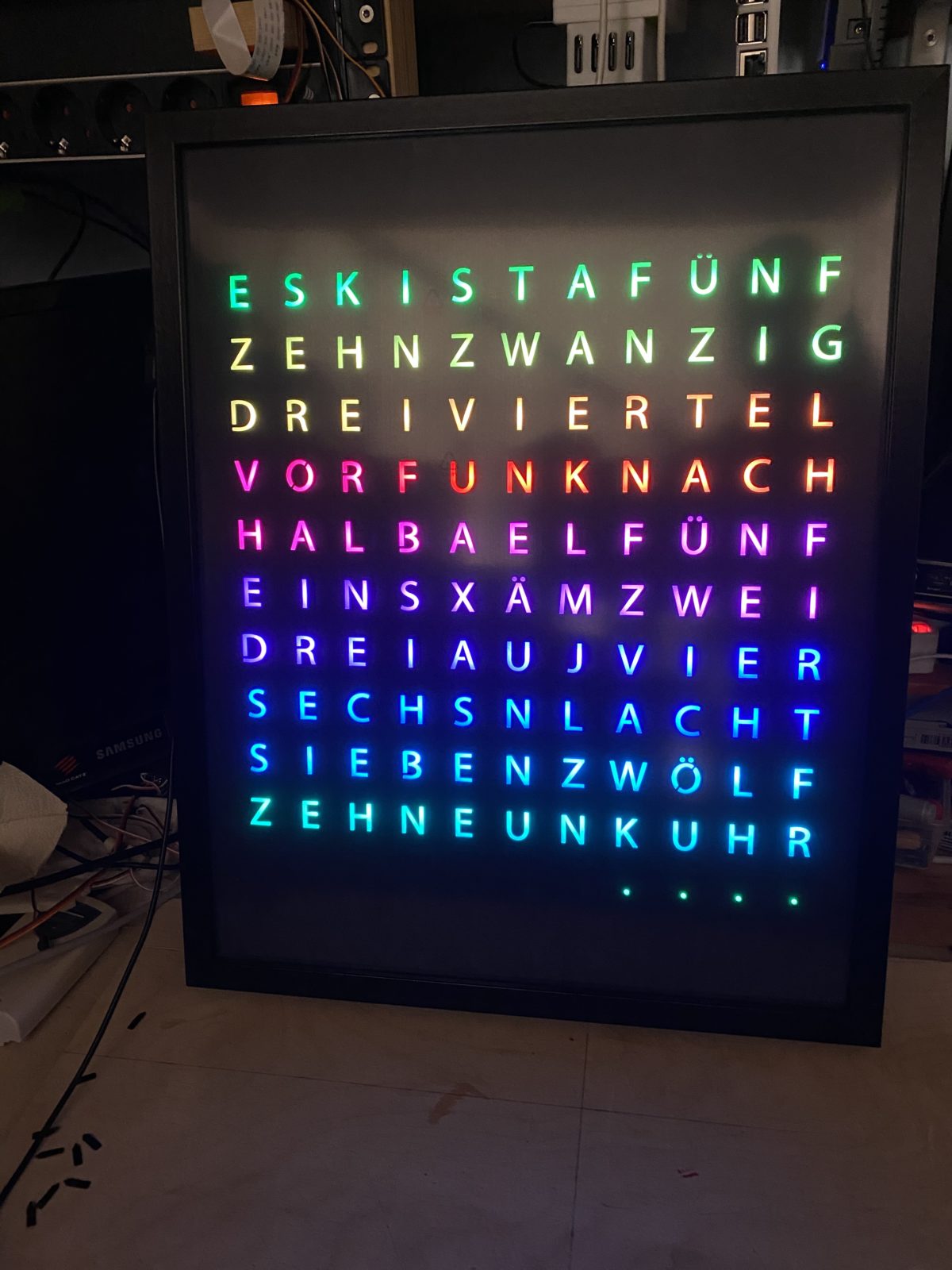
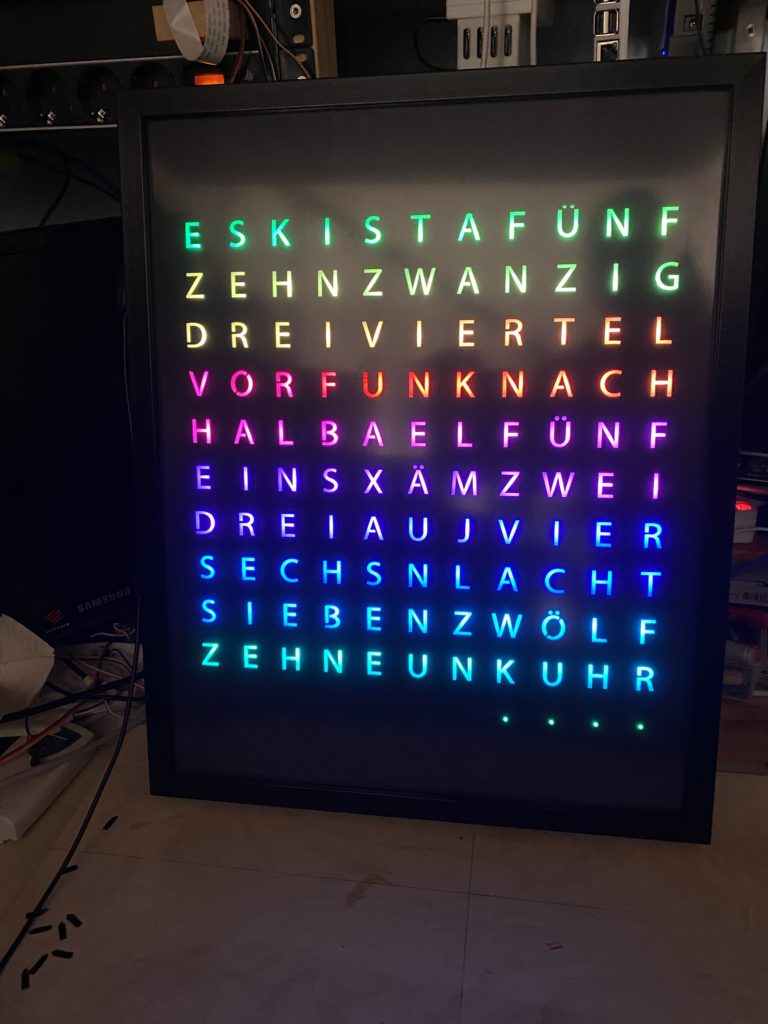
Die Punkte unten rechts sind die Minuten bis Vier an der Zahl und müssen entsprechend addiert werden um die genaue Zeit zu erhalten
Demnächst Bilder mit der funktionierenden Software
Achtung Spoiler: Es wird eine Word Uhr 😉

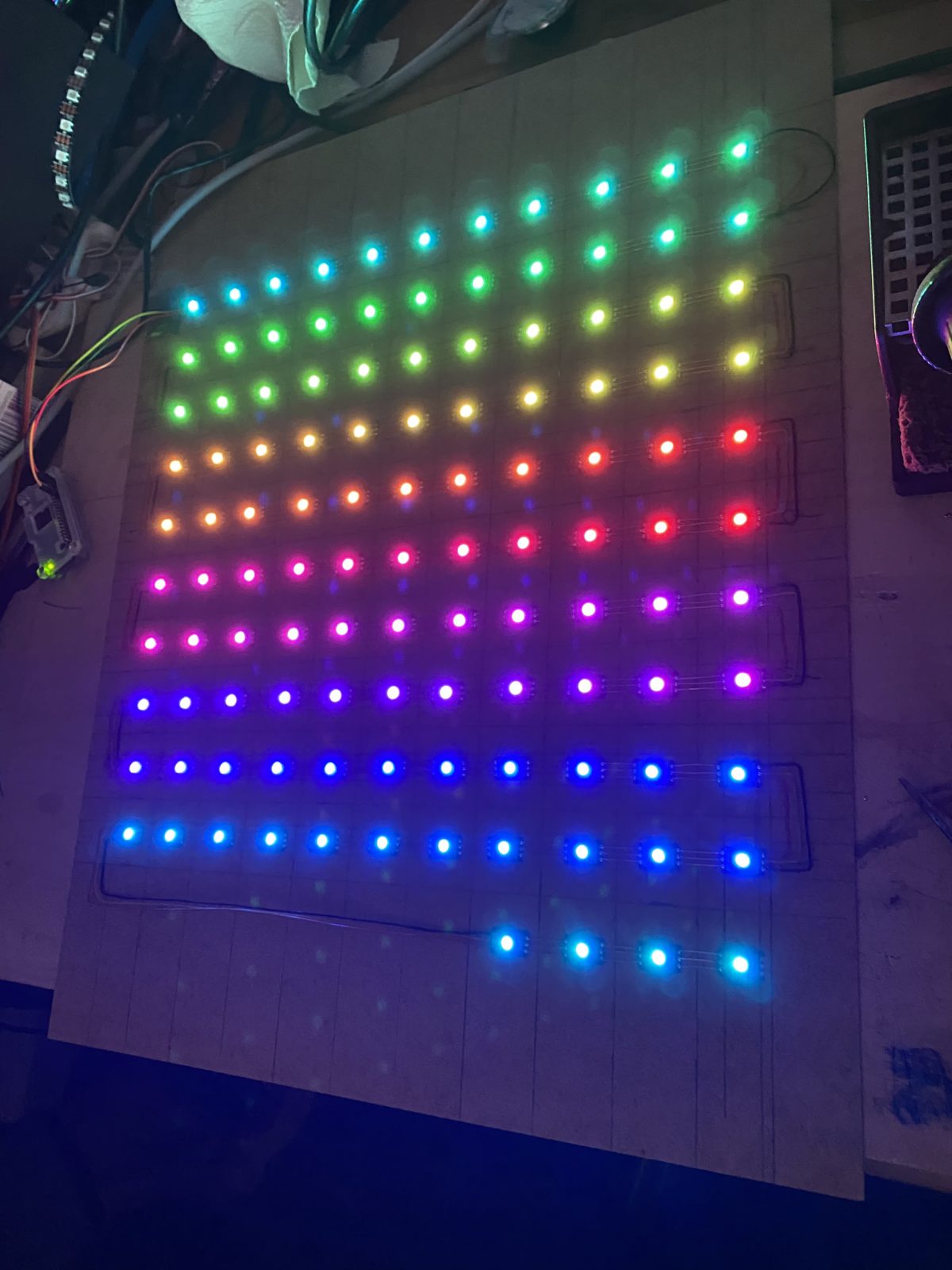
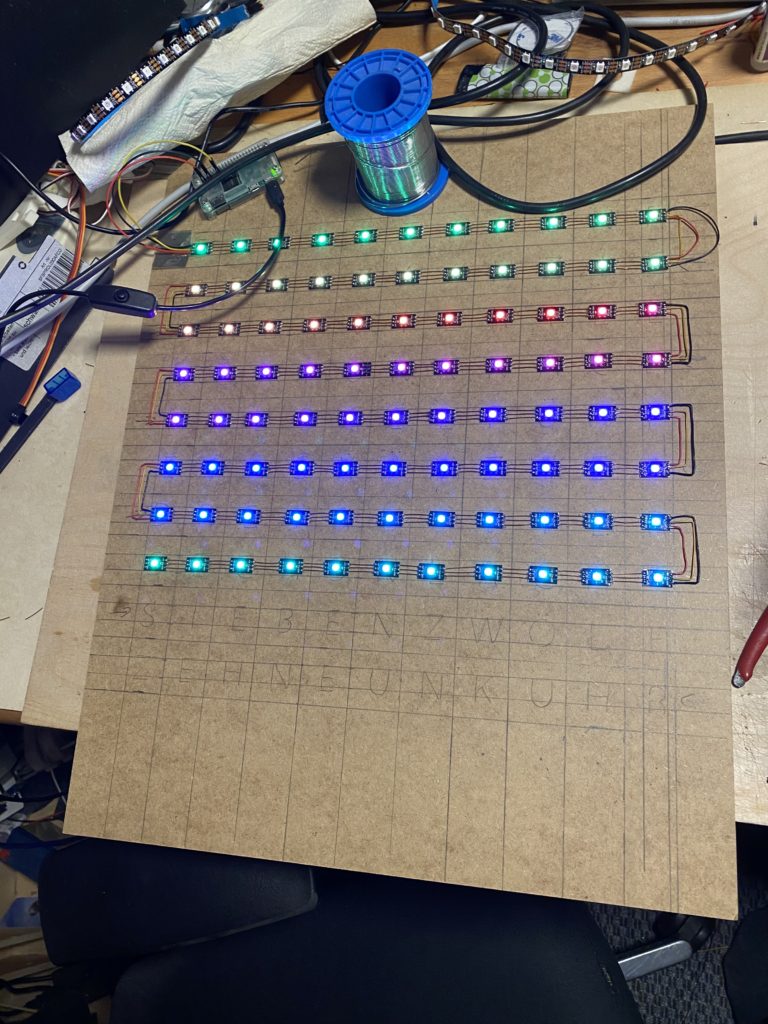

Aber was ist das, außer das es bunt ist ?



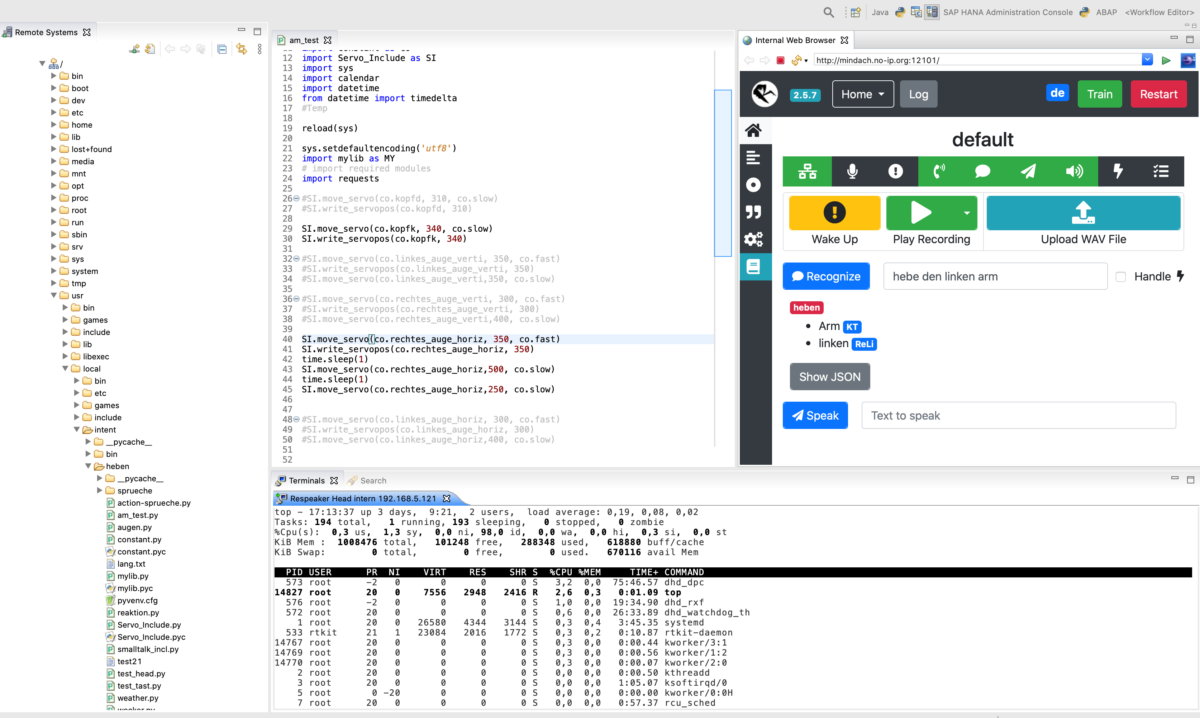
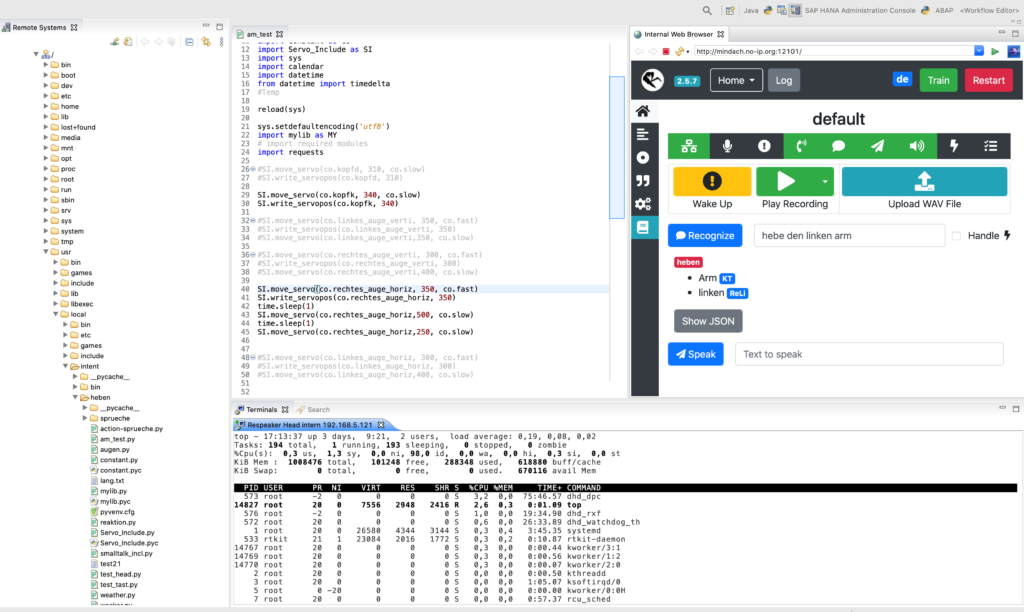
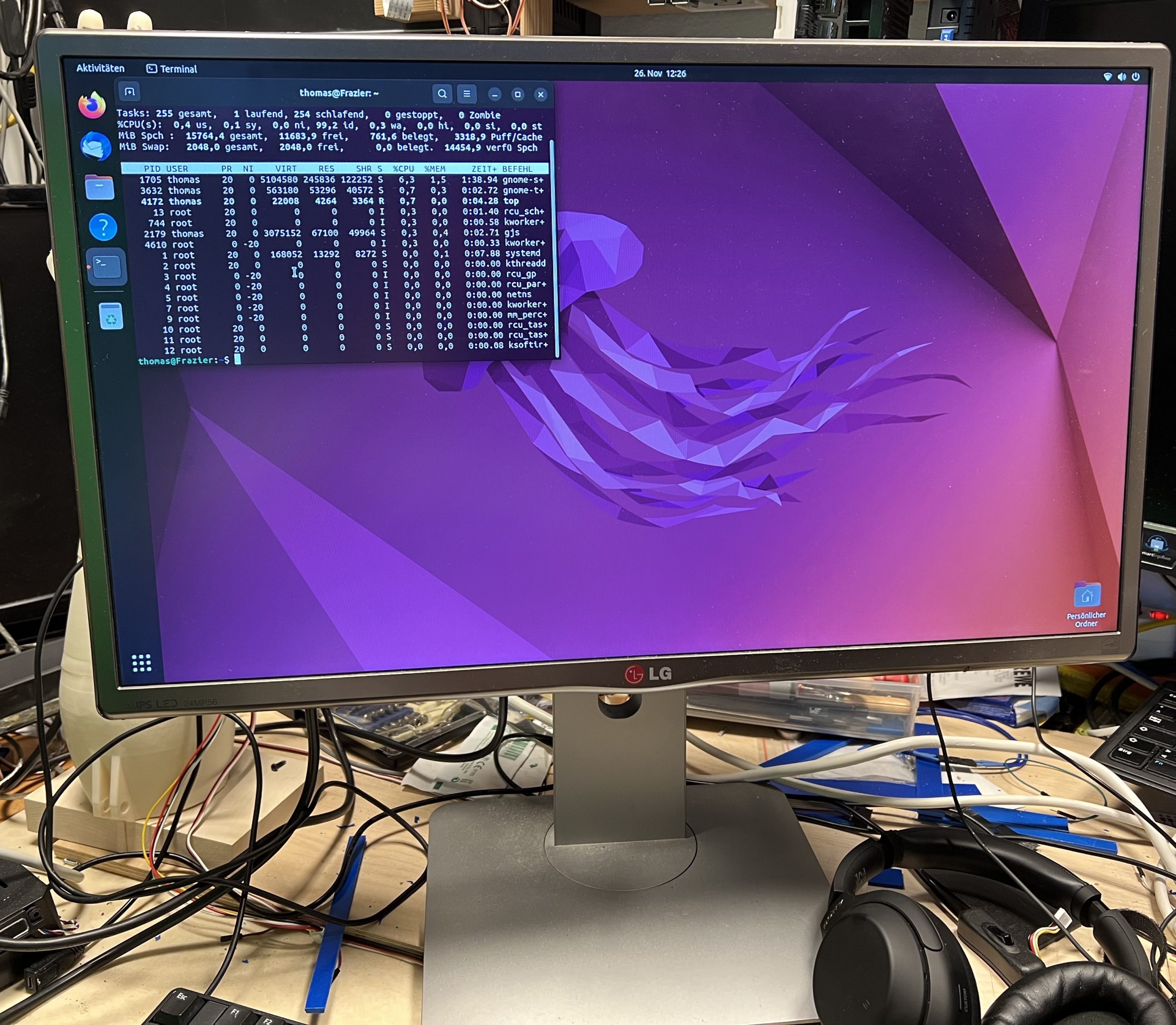
Die eclipse IDE: links der Remote explorer mit dem Zugriff auf den Respeaker Core v2.
In der Mitte die Python Datei zum Testen. Rechts die Weboberfläche für Rhasspy.
Unten der ssh Zugriff auf den Respeaker Core v2 mit einem Debian OS und der Ausgabe von Top.
Auf dem Respeaker läuft ein Docker Image mit Rhasspy 2.5.7 .
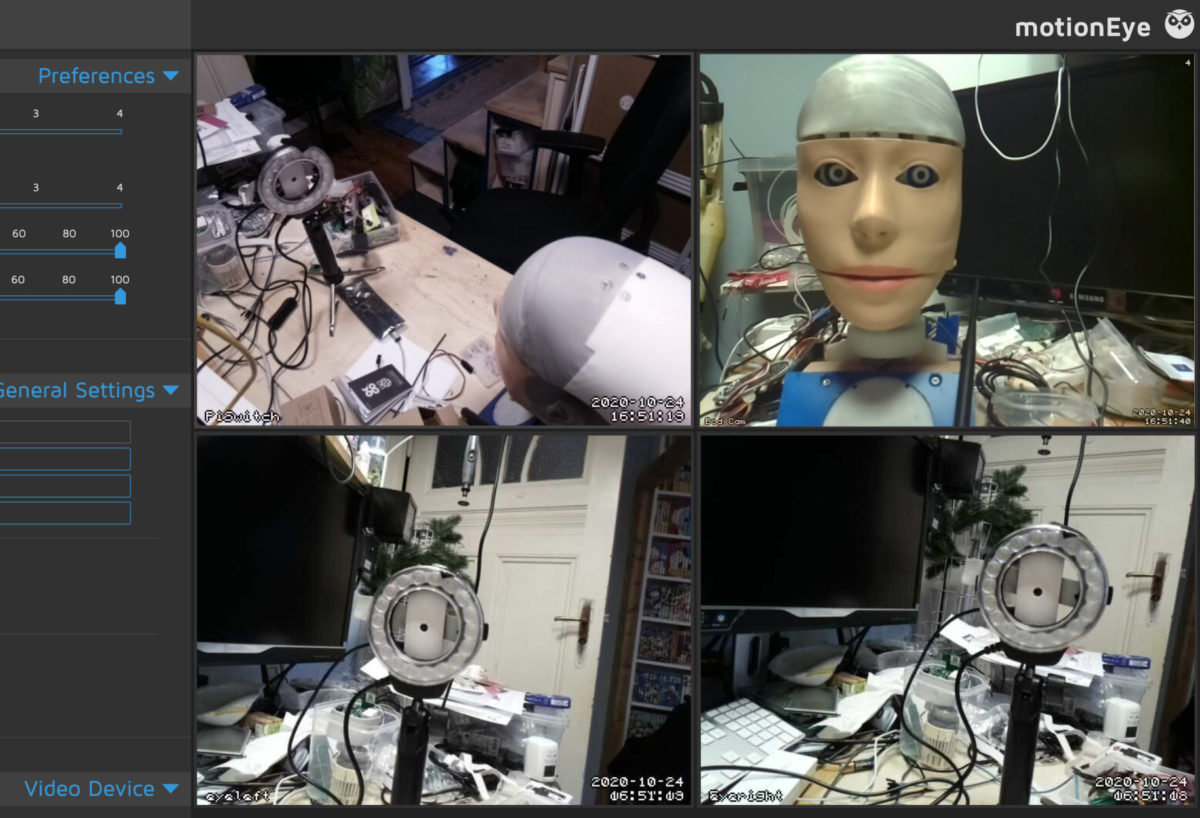
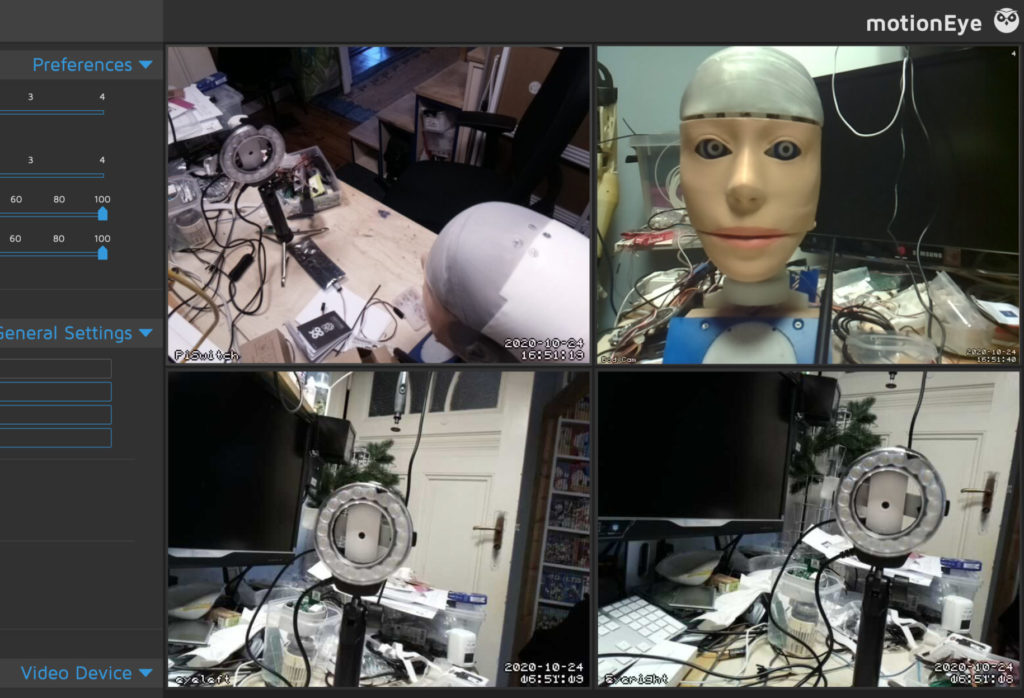
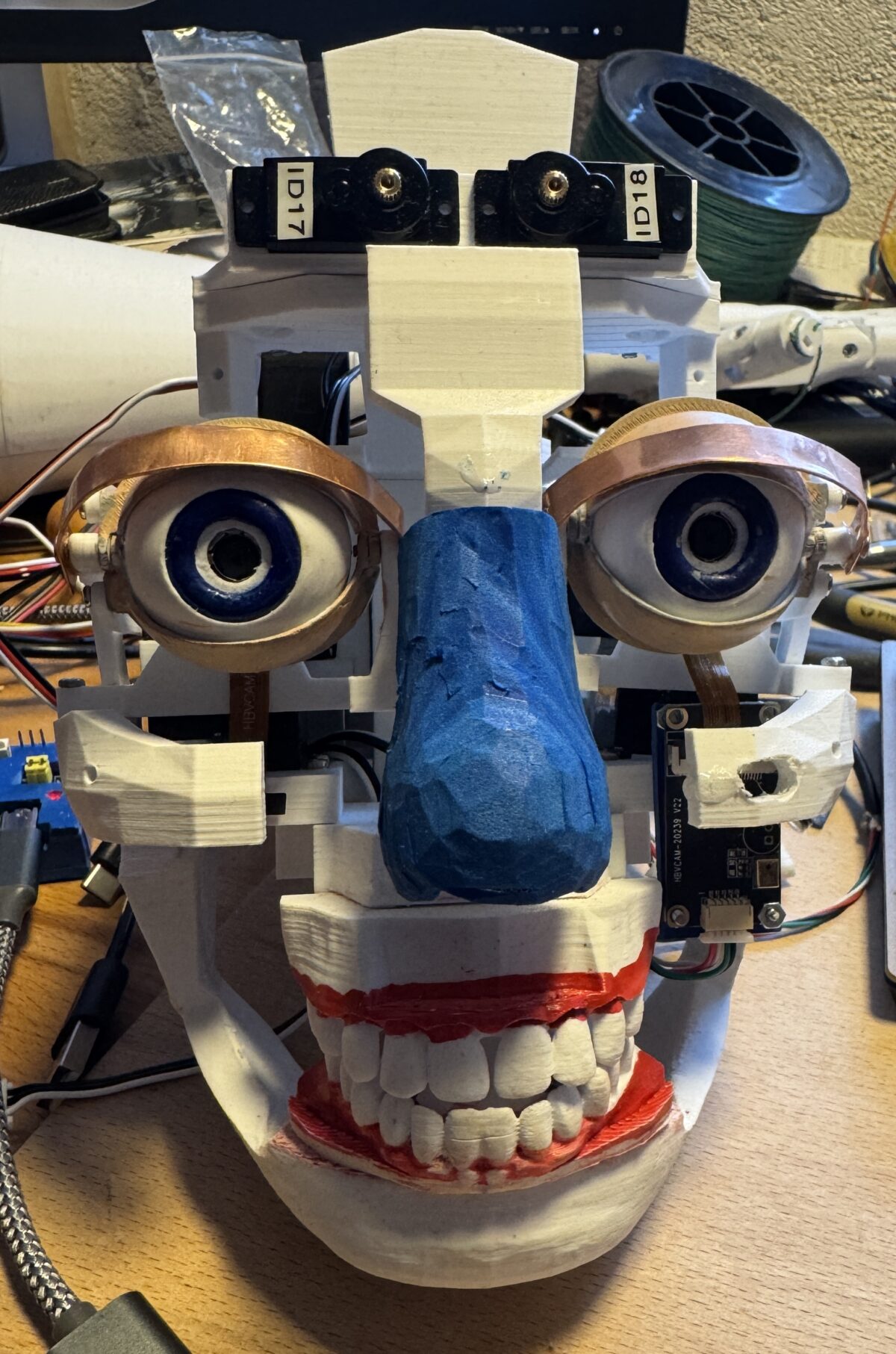
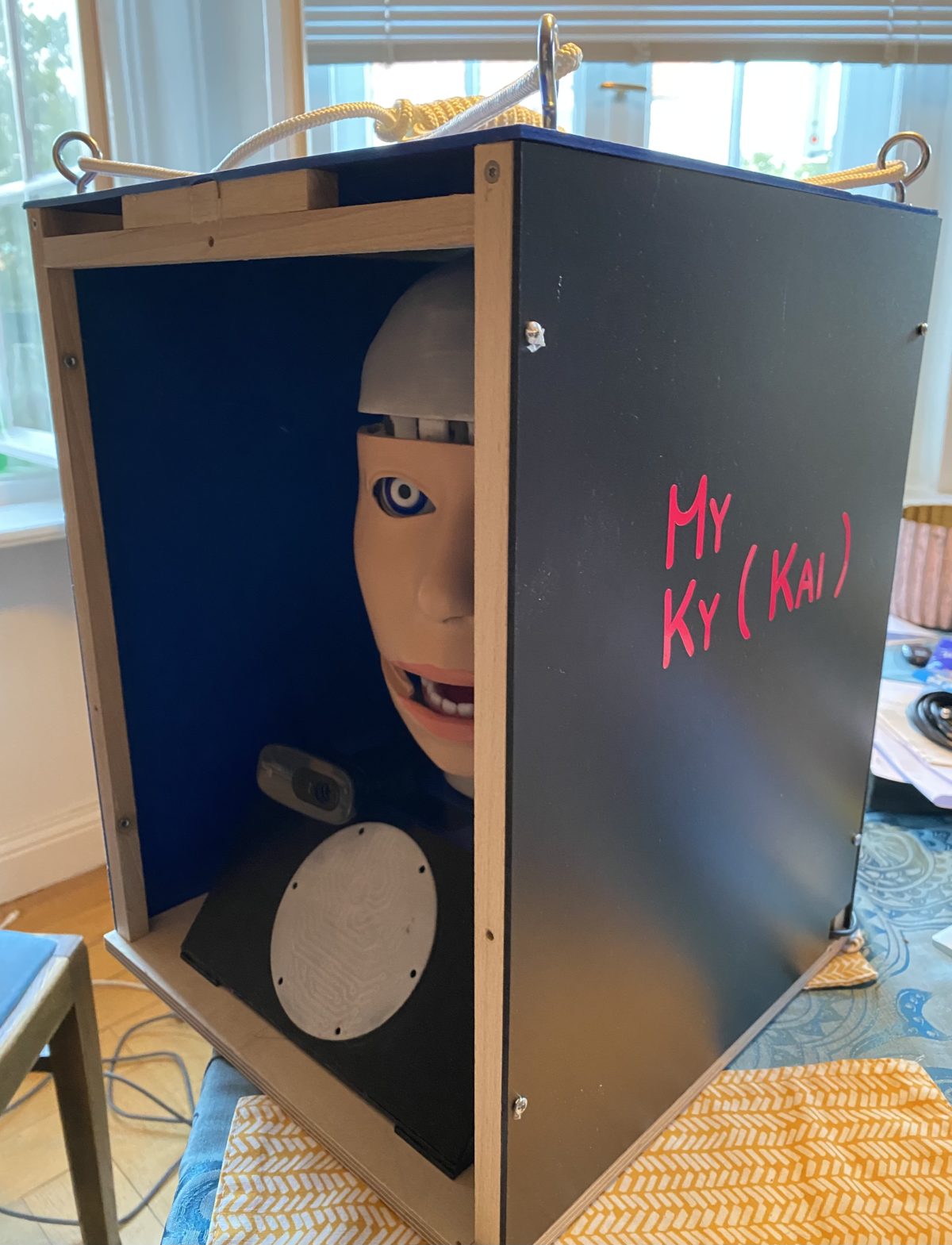
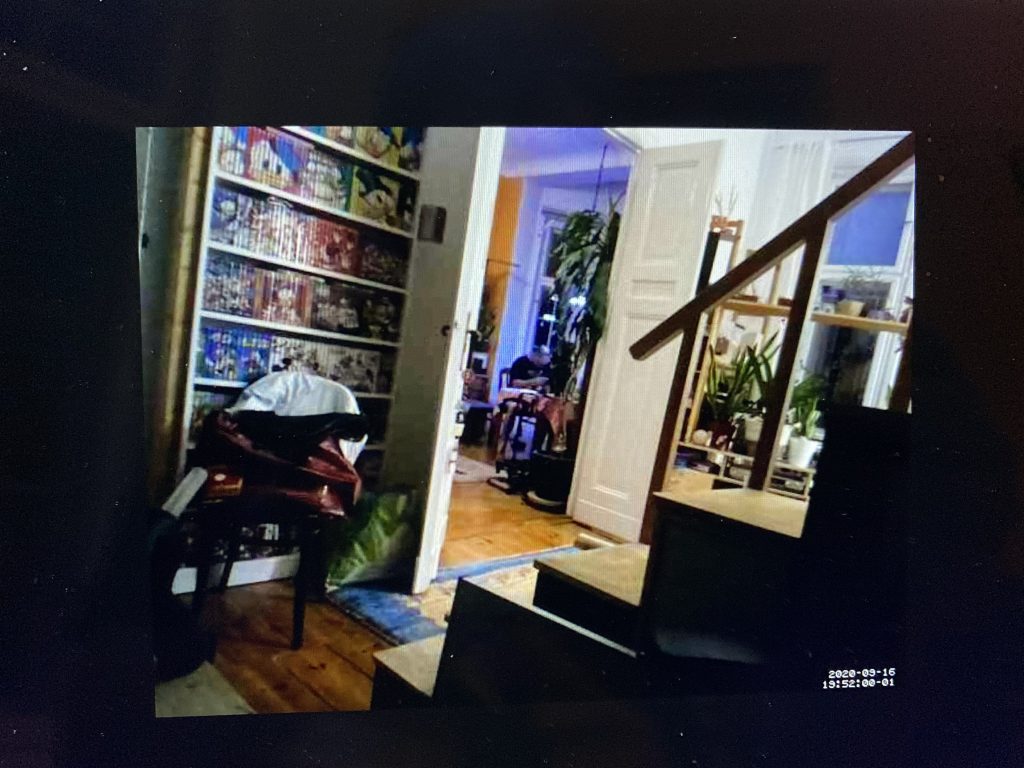
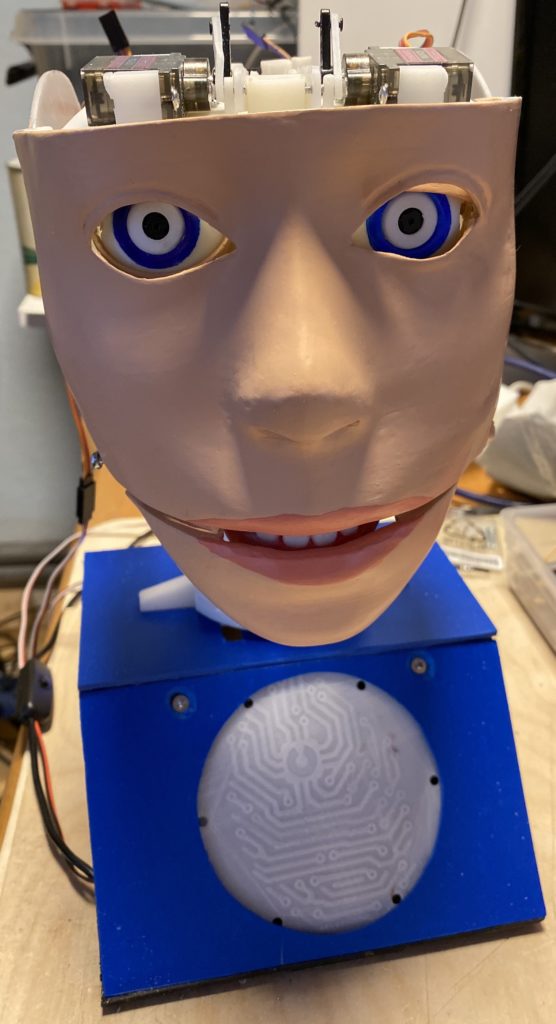
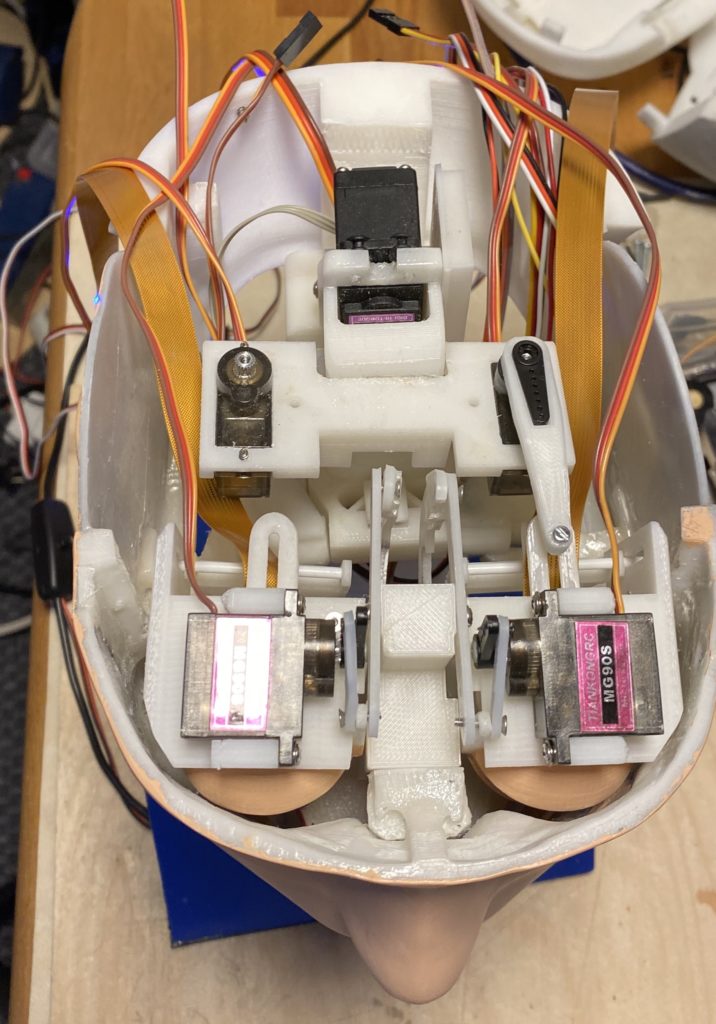
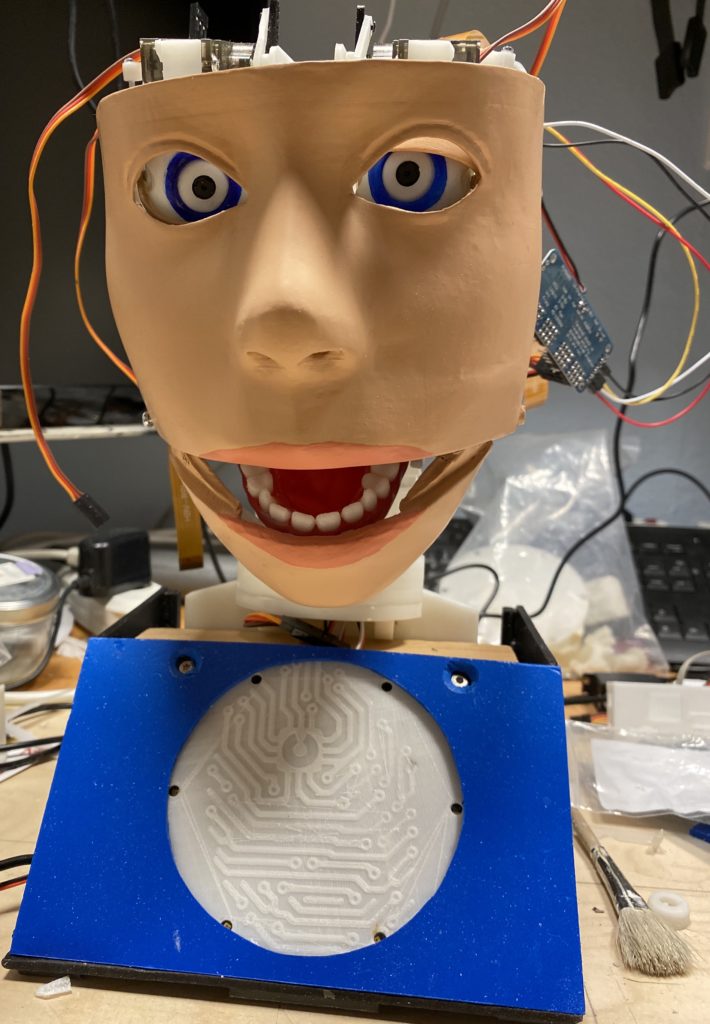
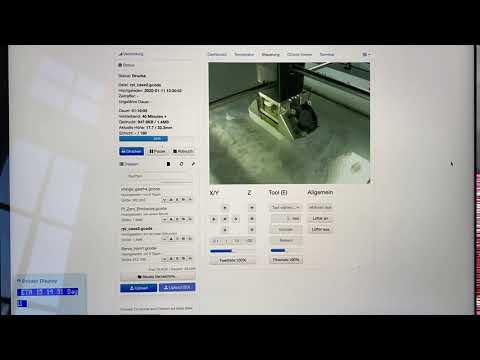
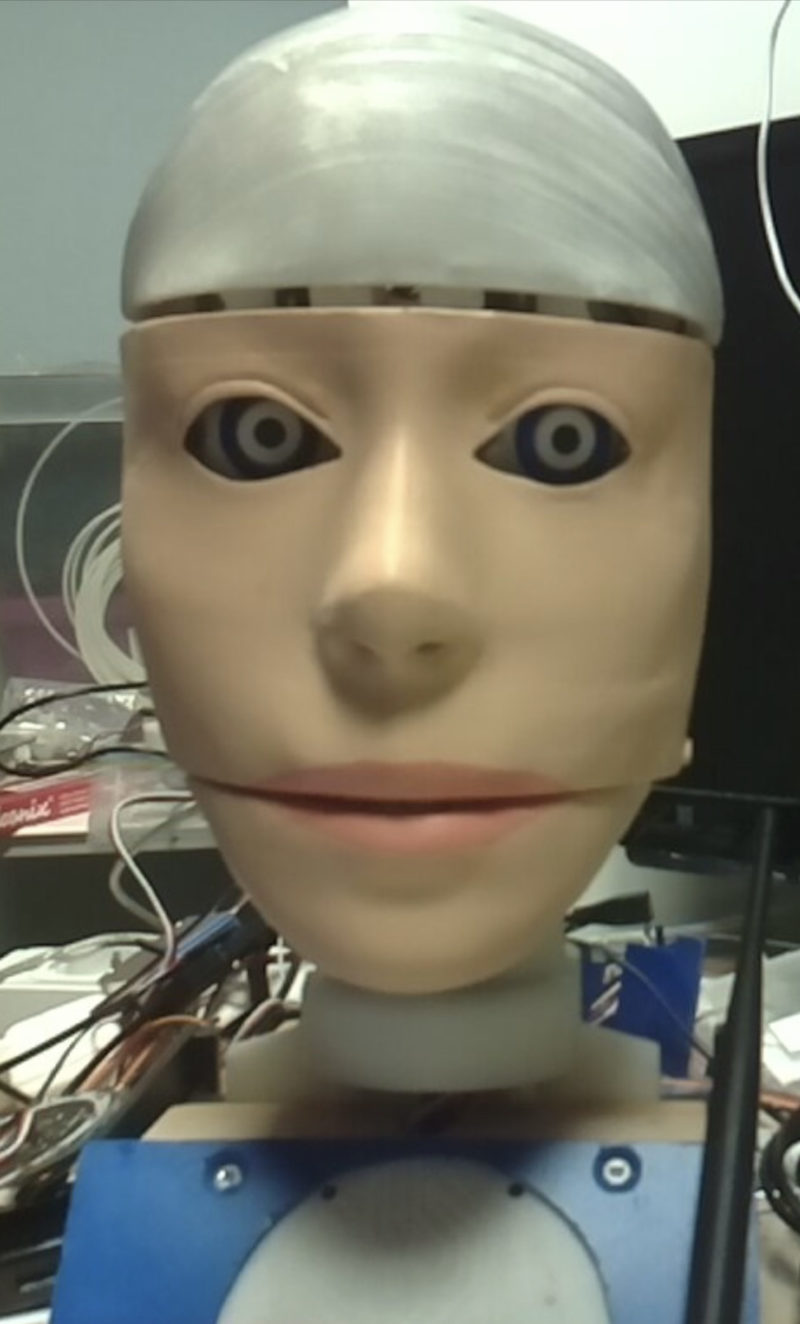
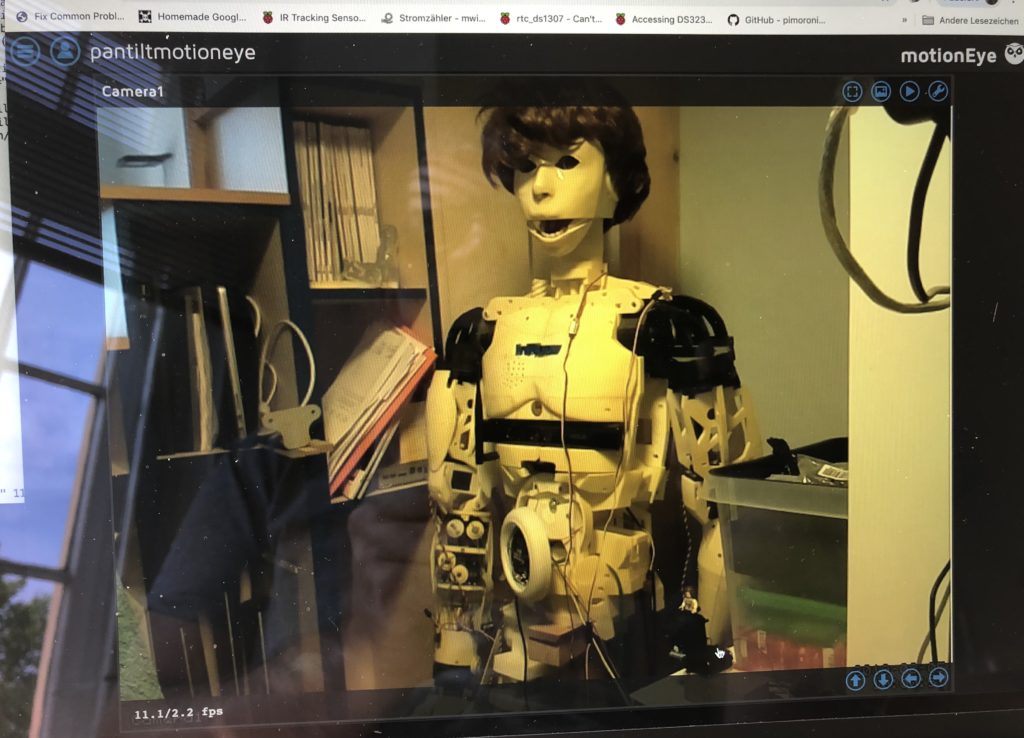
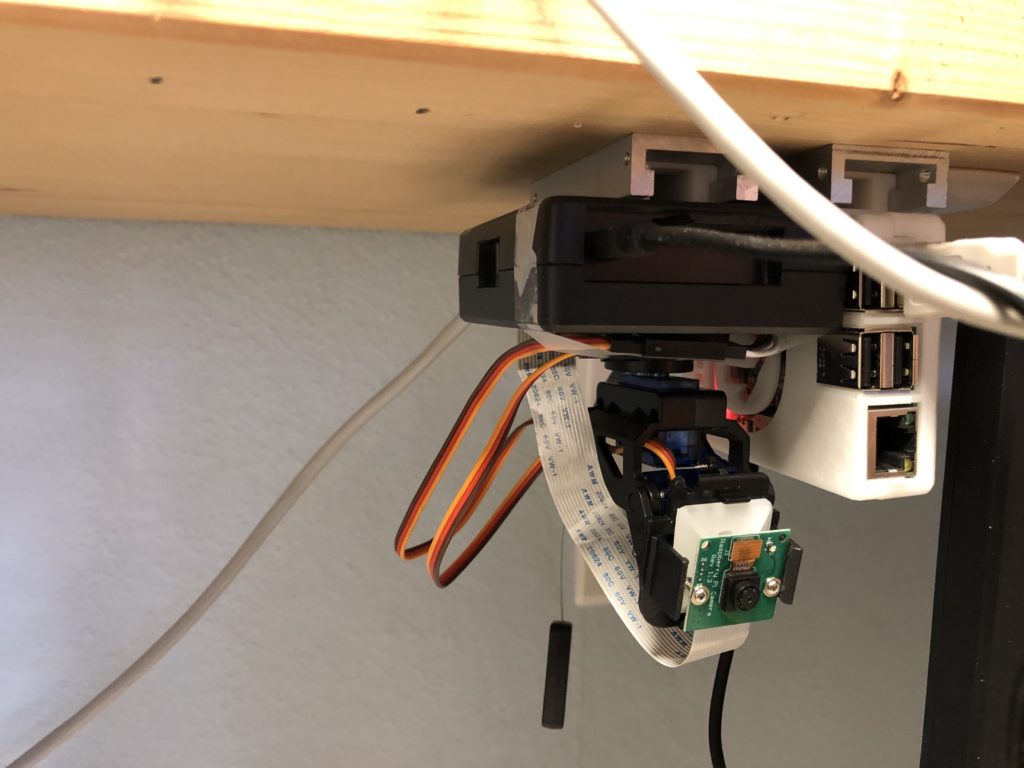
Die Augenkameras zeigen die Lampe die vom Server bei Dunkelheit angeschaltet werden kann
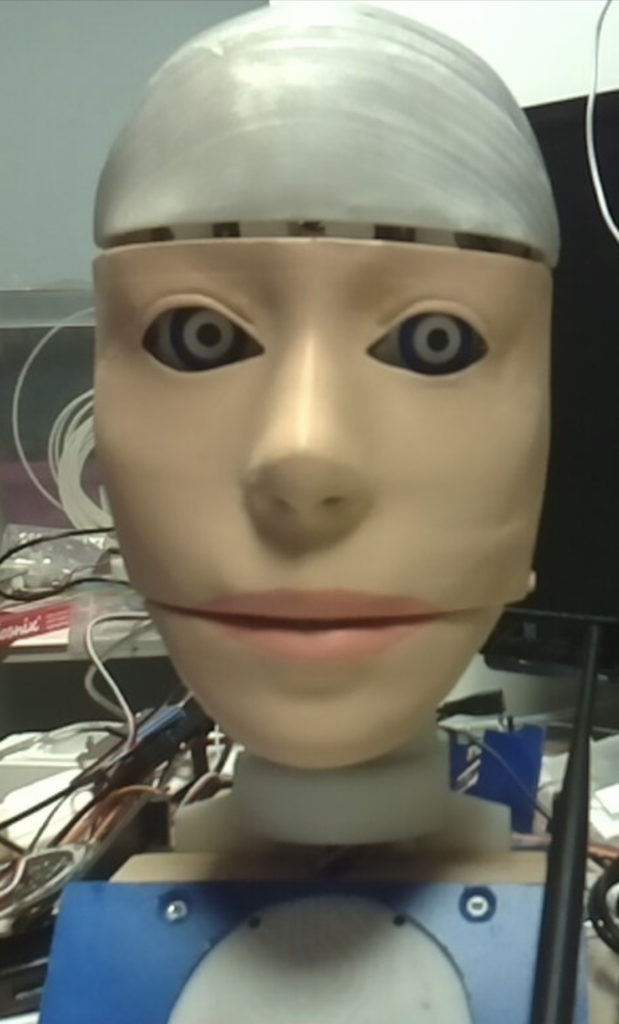
Im oberen Bild sieht man rechts oben die Werkstattkamera links oben der Blick auf den Kopf von der BodyCam.
Unten rechts ist die rechte Augenkamera unten links die linke Augenkamera


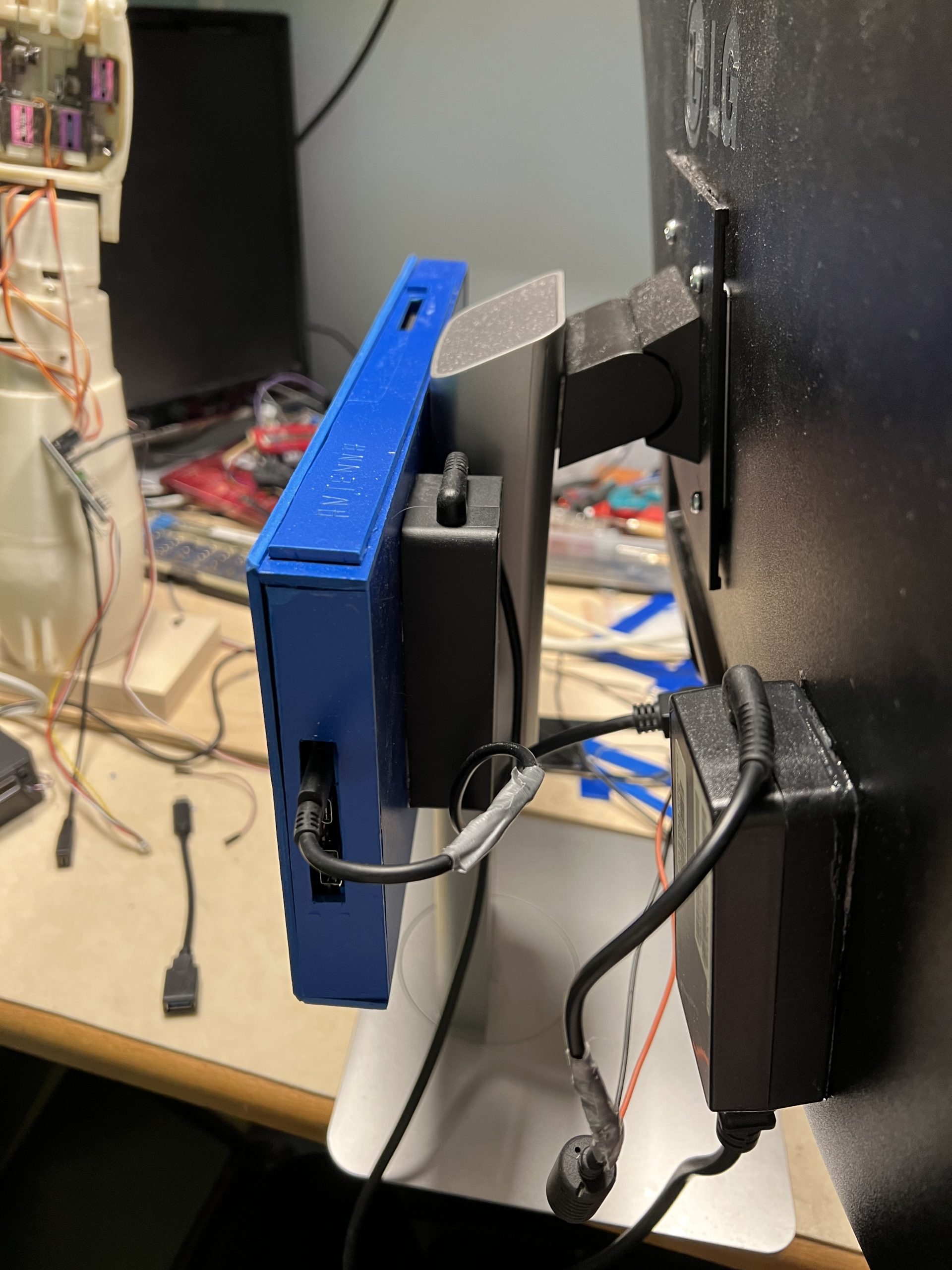
Das ganze mit einem USB-Stick Multimeter gemessen und zeigt den Stromverbrauch des Kopfes
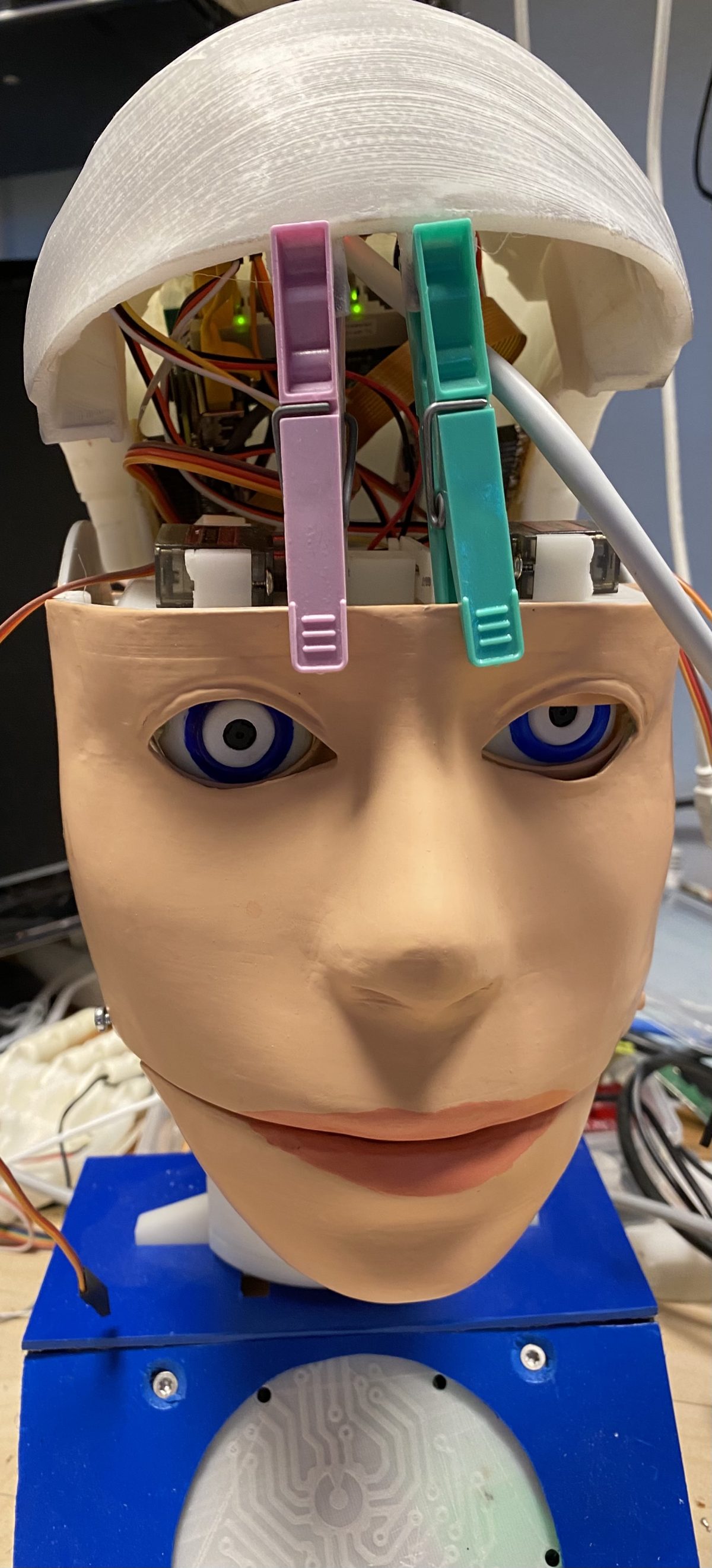
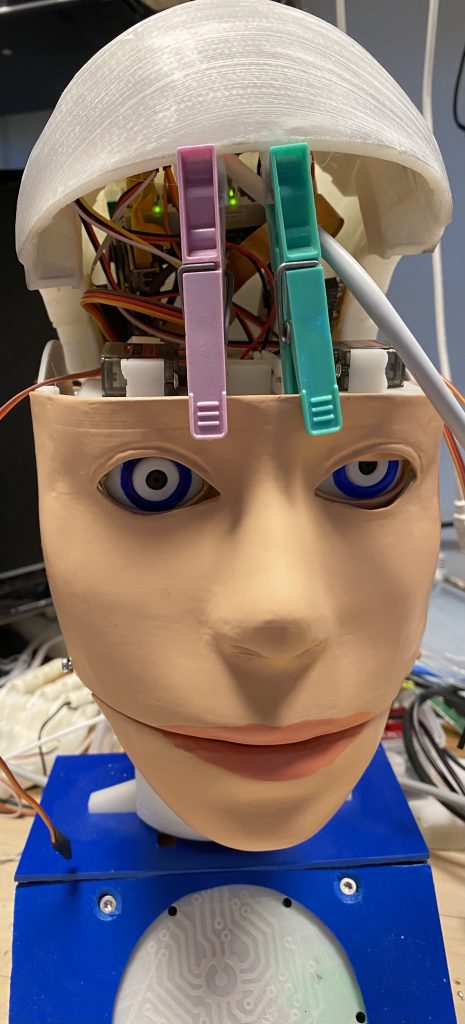

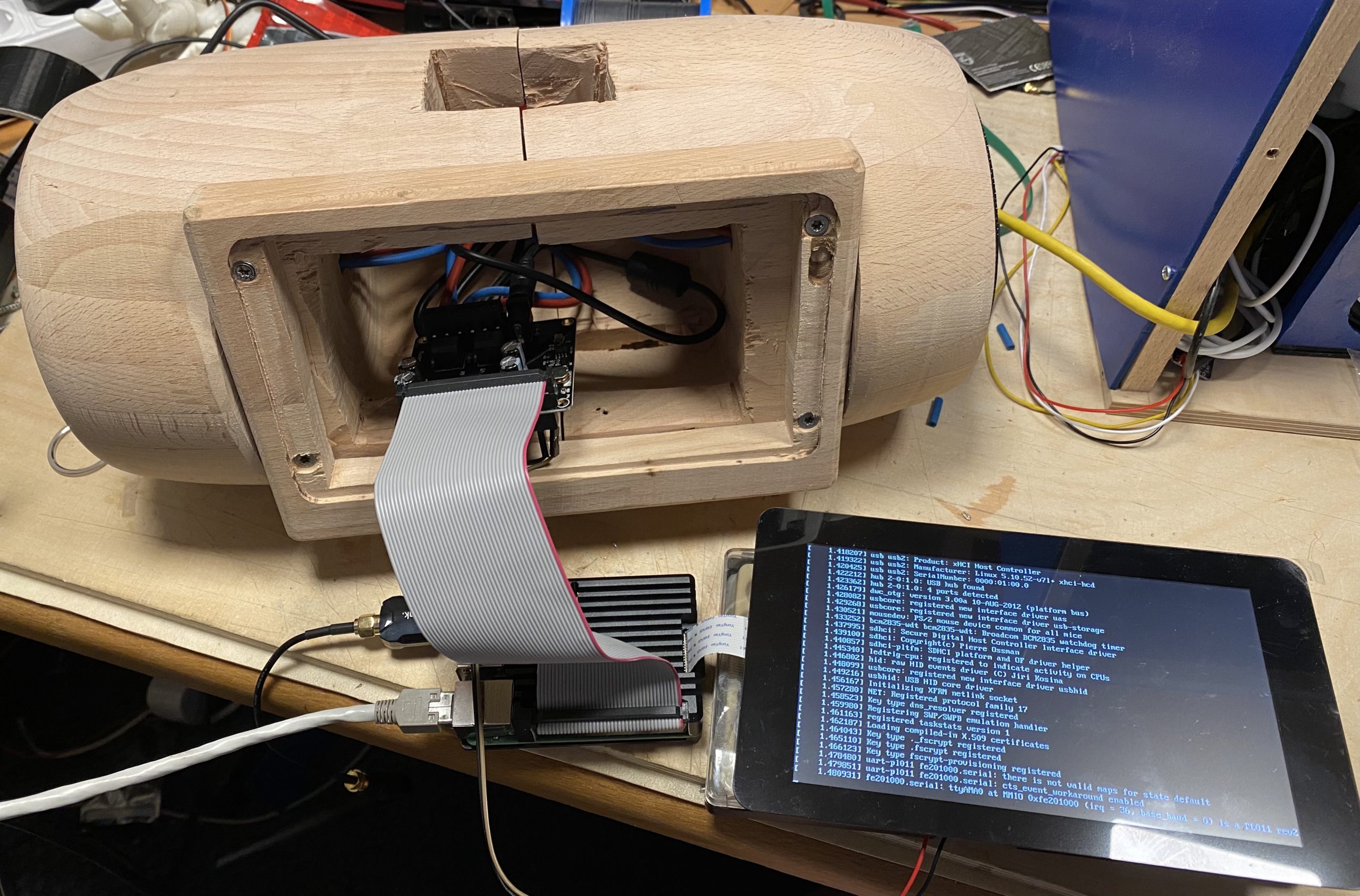
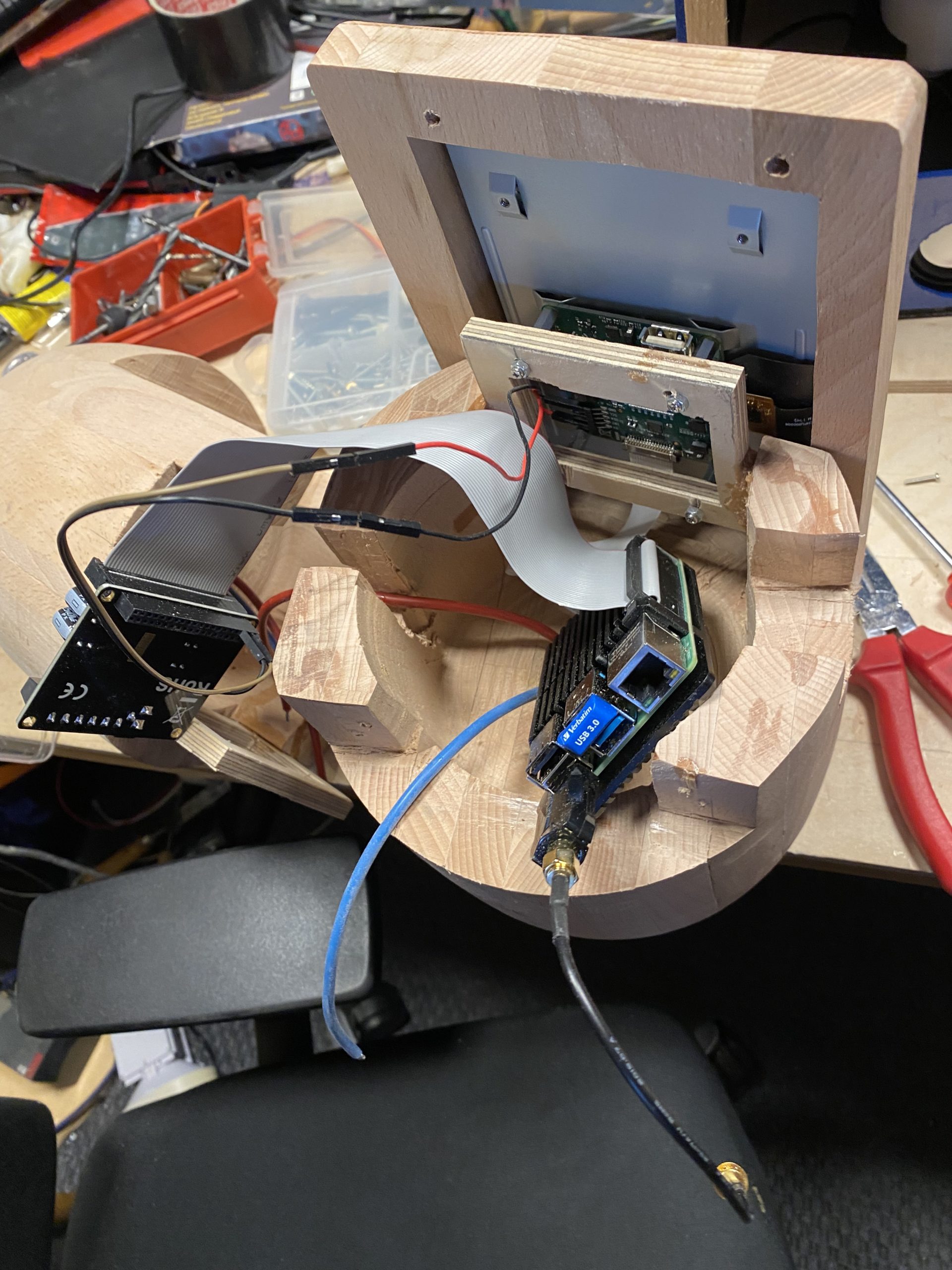
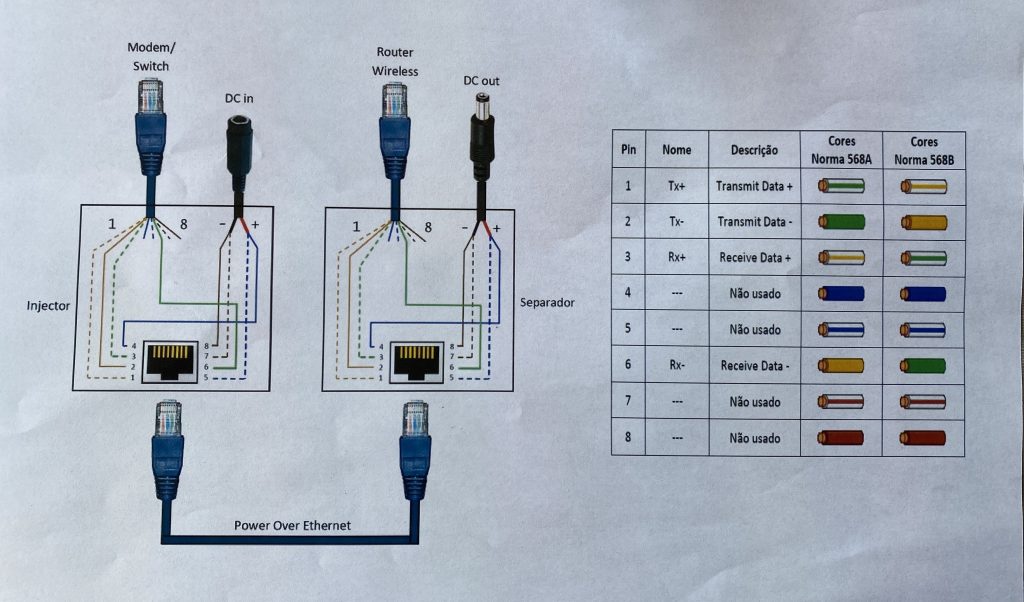
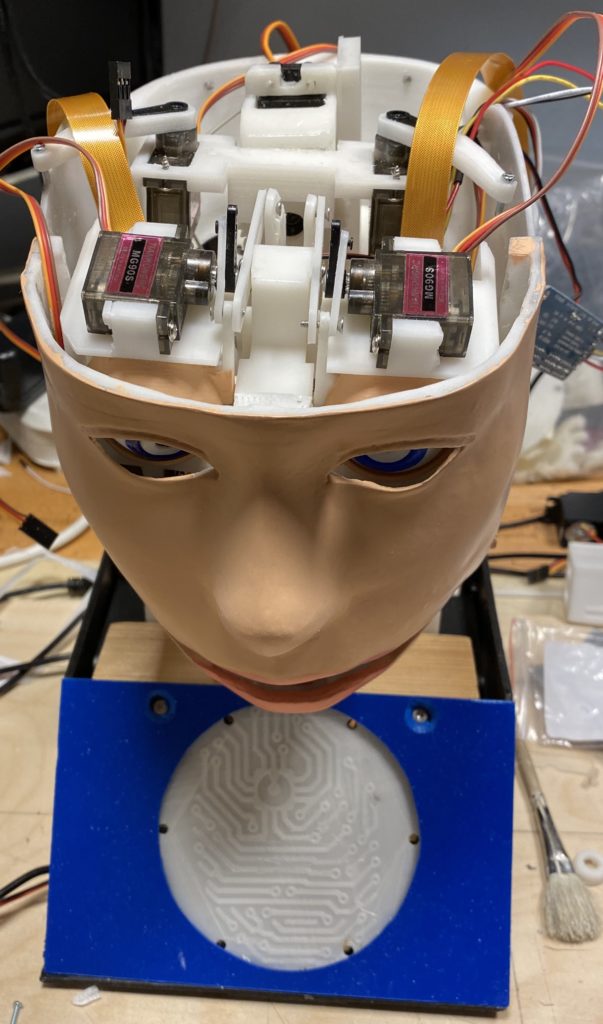
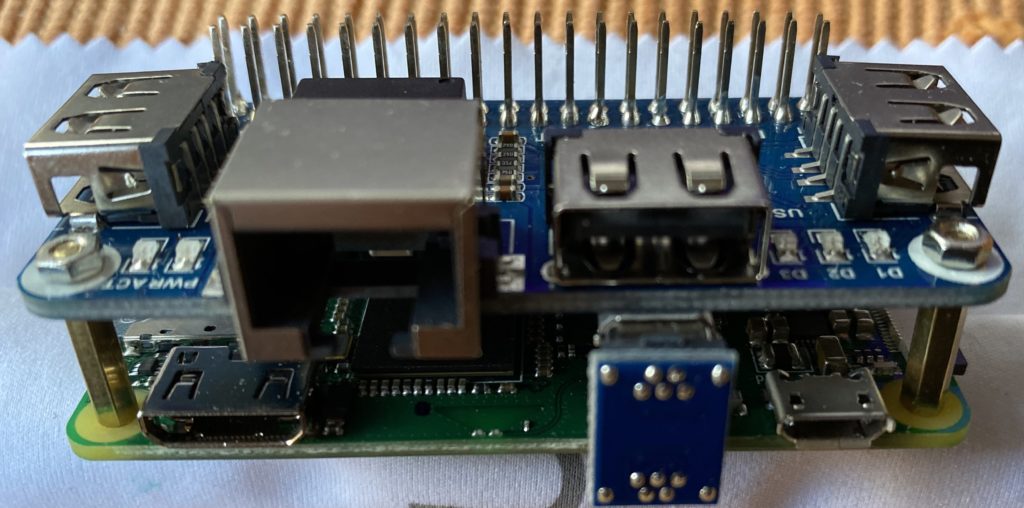
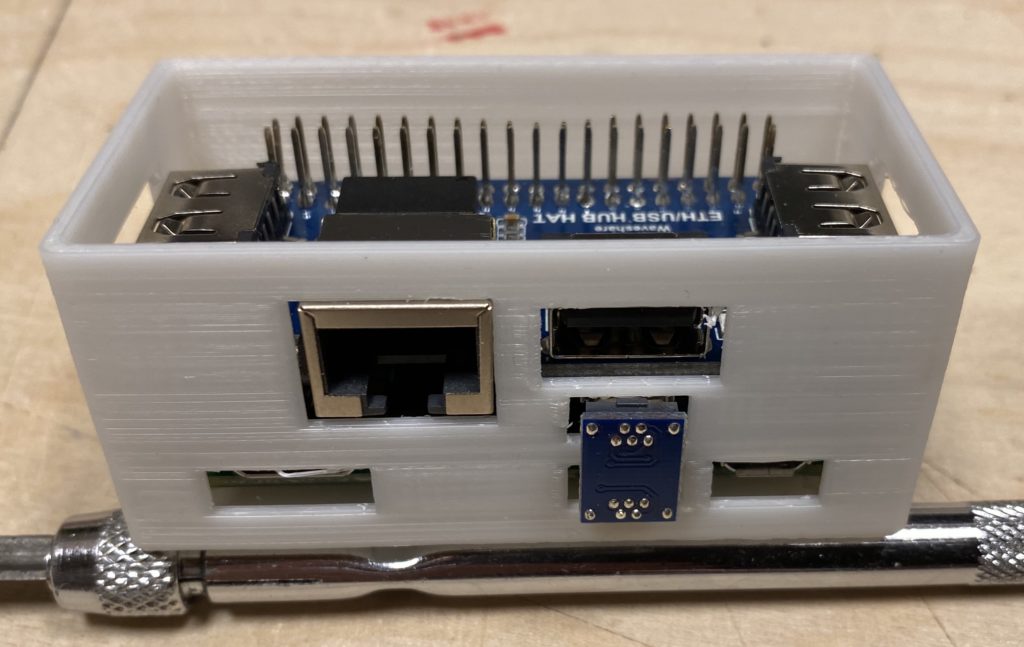
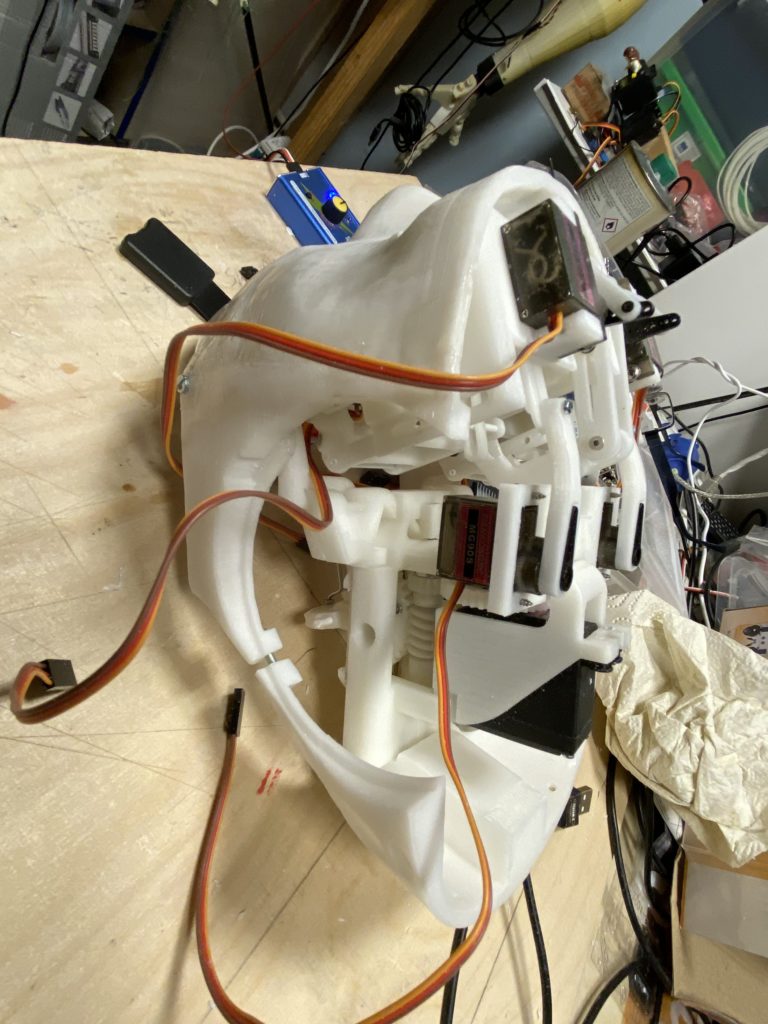
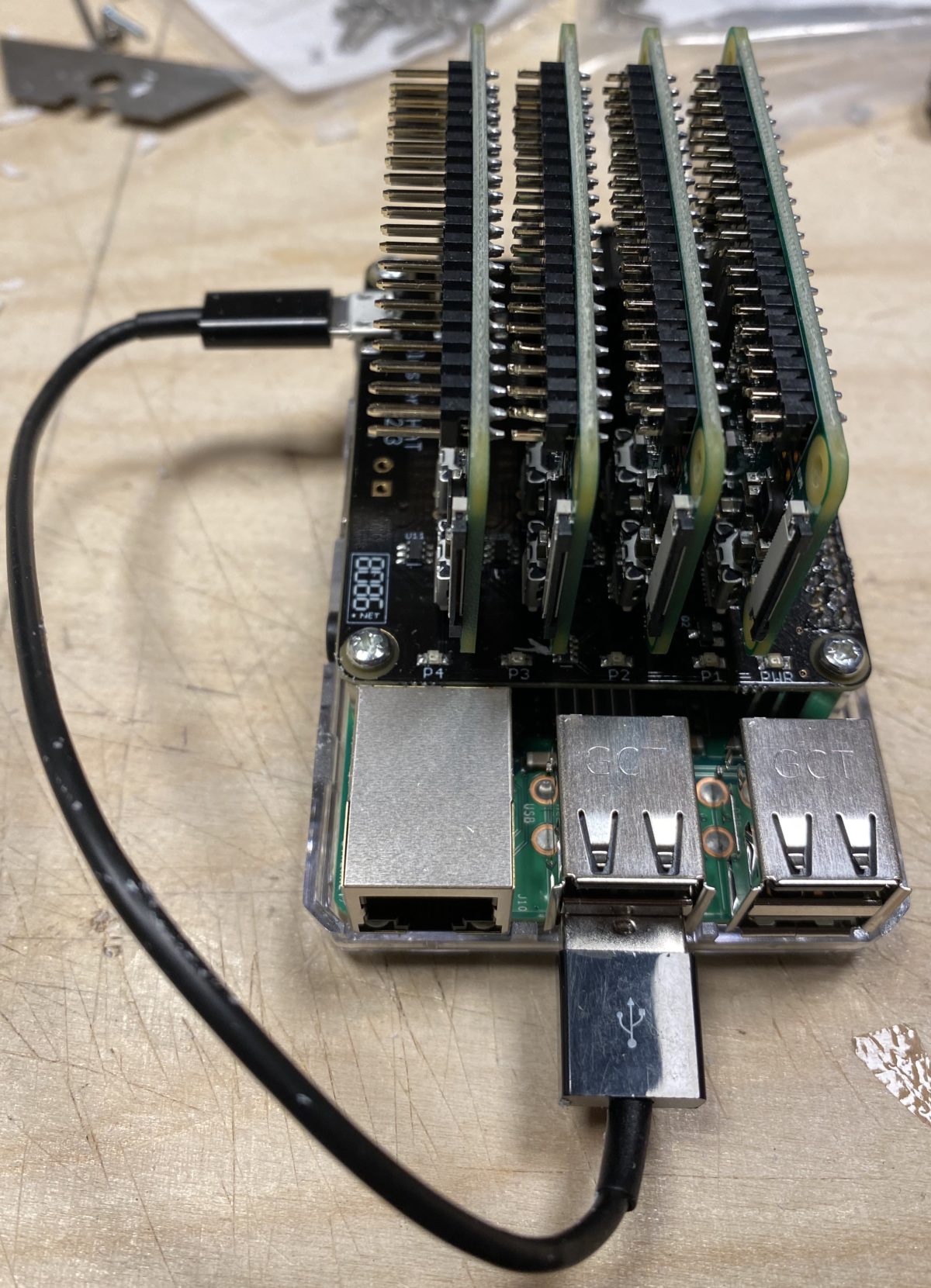
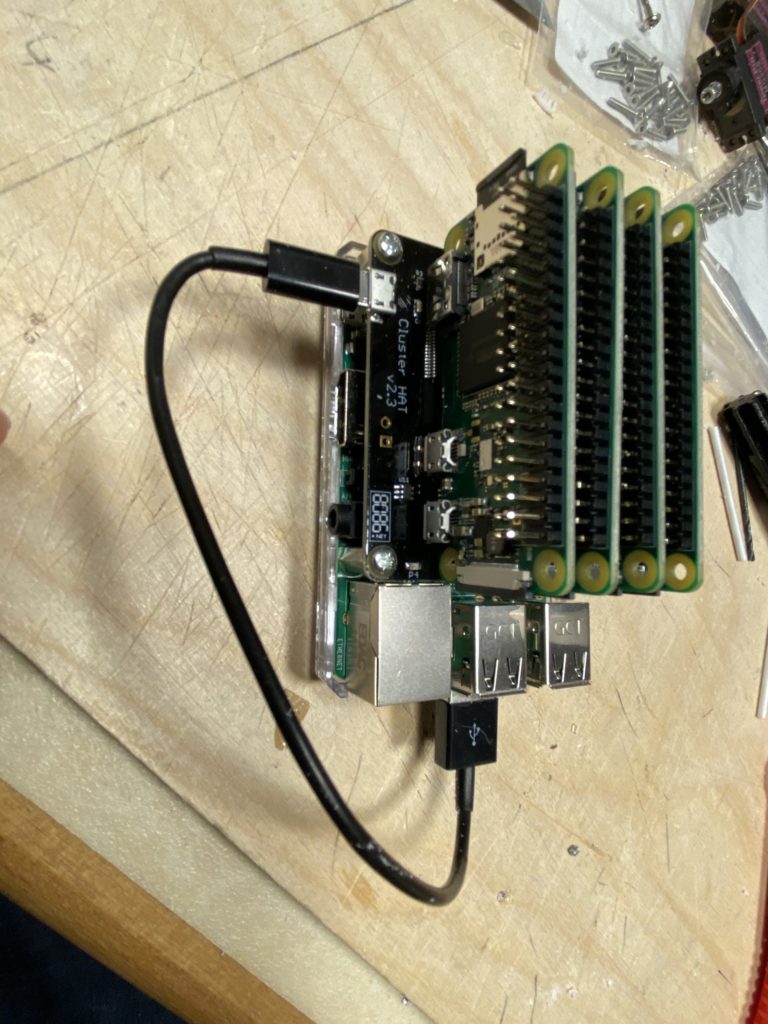
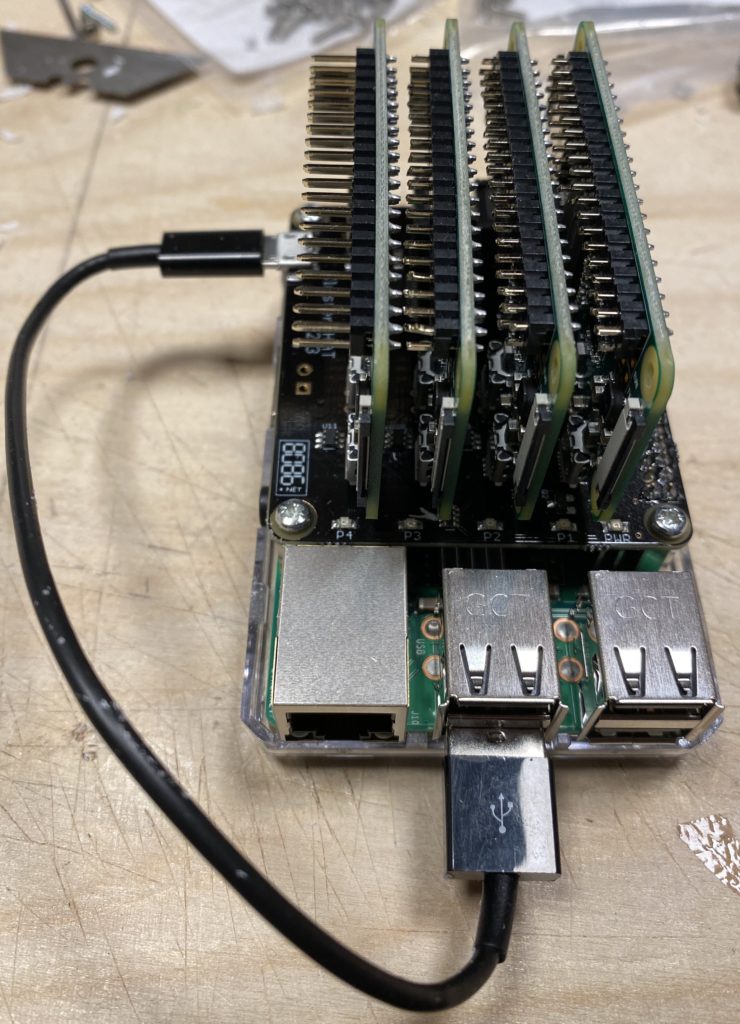
Im inneren des Kopfes werkeln 2 Raspberry Pi zero + USB to Ethernet adapter + 5-Fach Switch. Auf den RpI’s läuft motion um die Augenkameras als Stream zur Verfügung zu stellen.


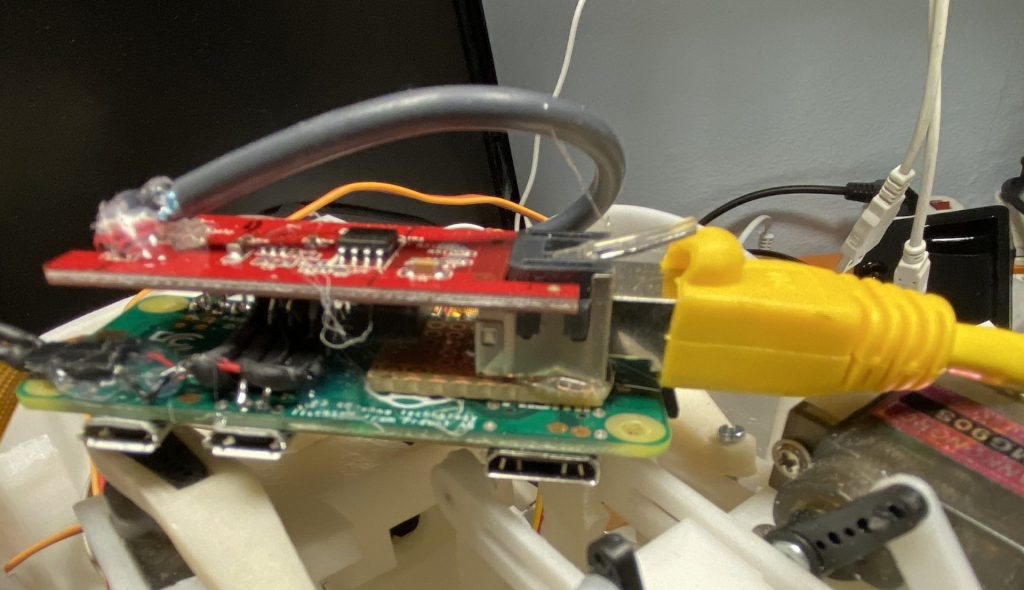
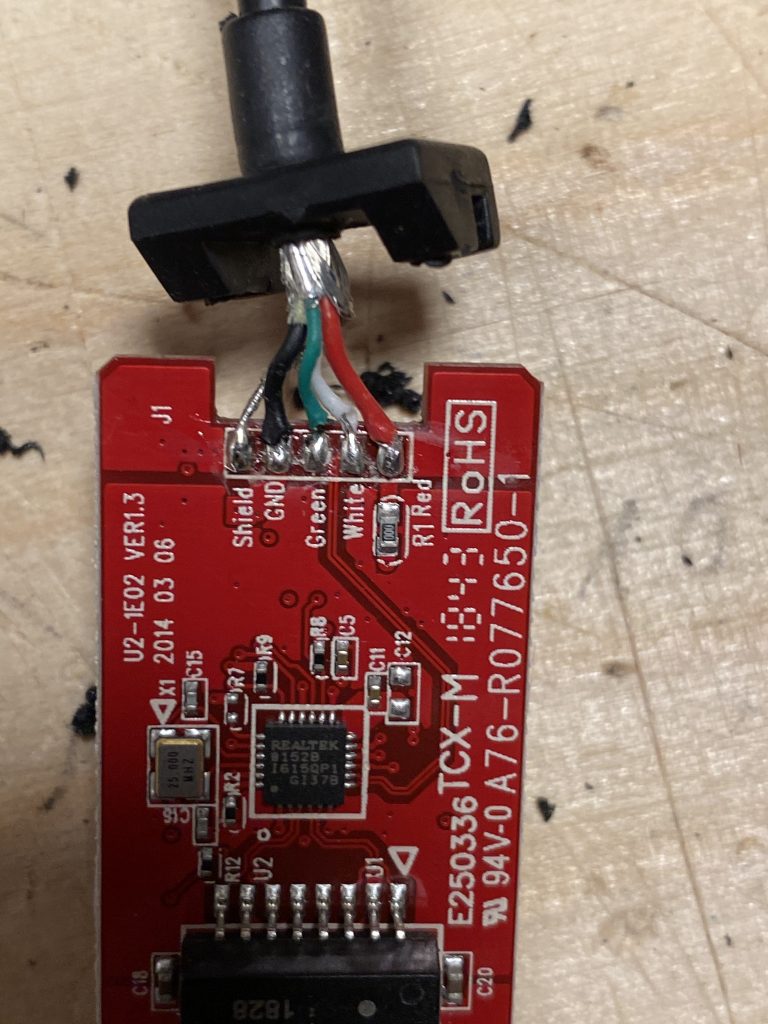
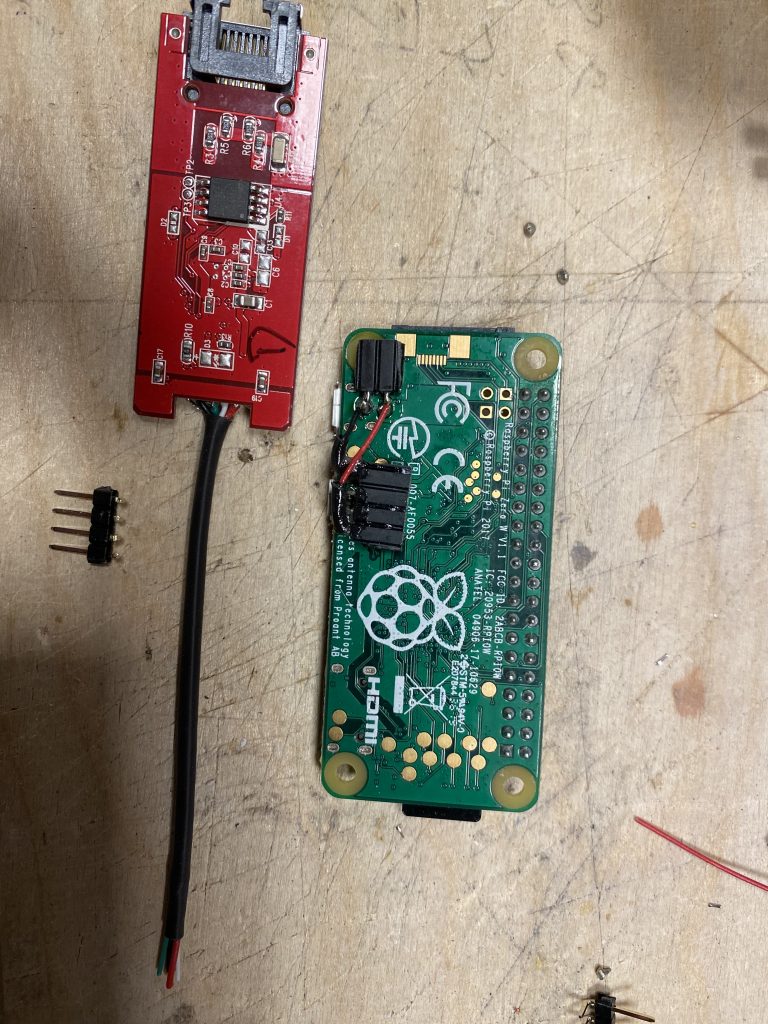
Ich habe einen USB zu Ethernet Adapter aufgesägt und die Platine auf den Raspberry Pi zero geklebt. Die USB Anschlüsse habe ich direkt auf die Platine gelötet, da die Stecker an der Seite zuviel Platz wegnehmen.
Auf dem Raspberry pi zero läuft Buster mit motion für die Camera
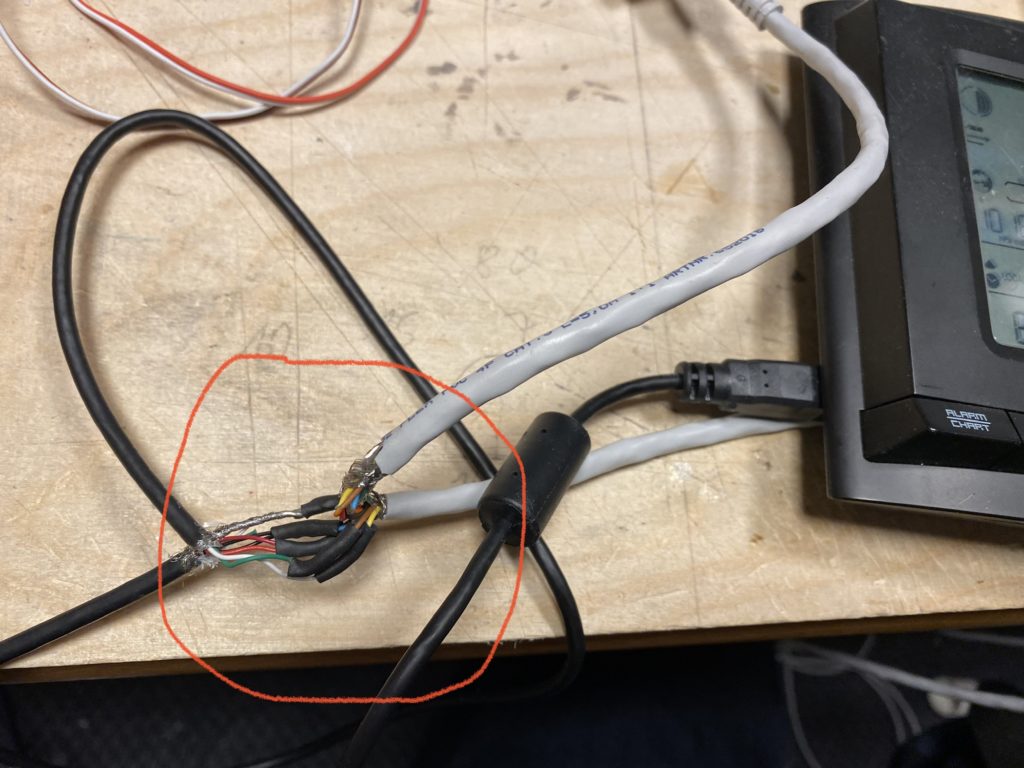


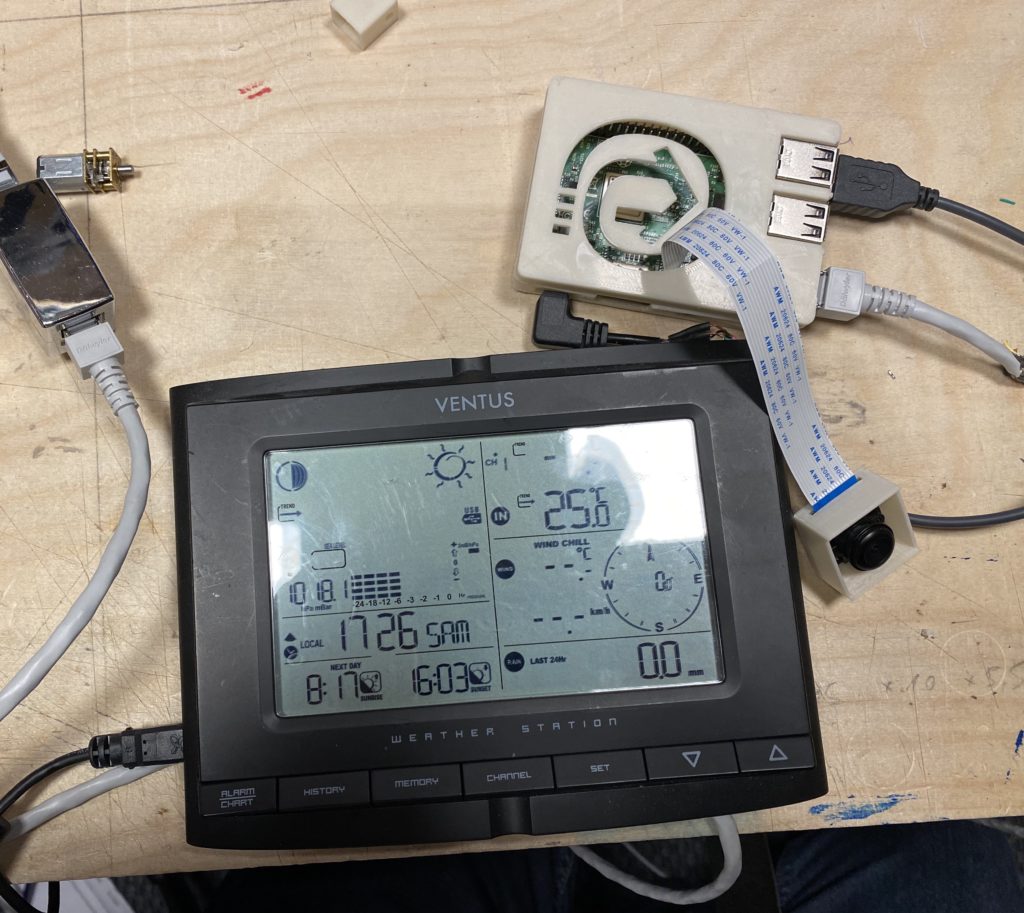
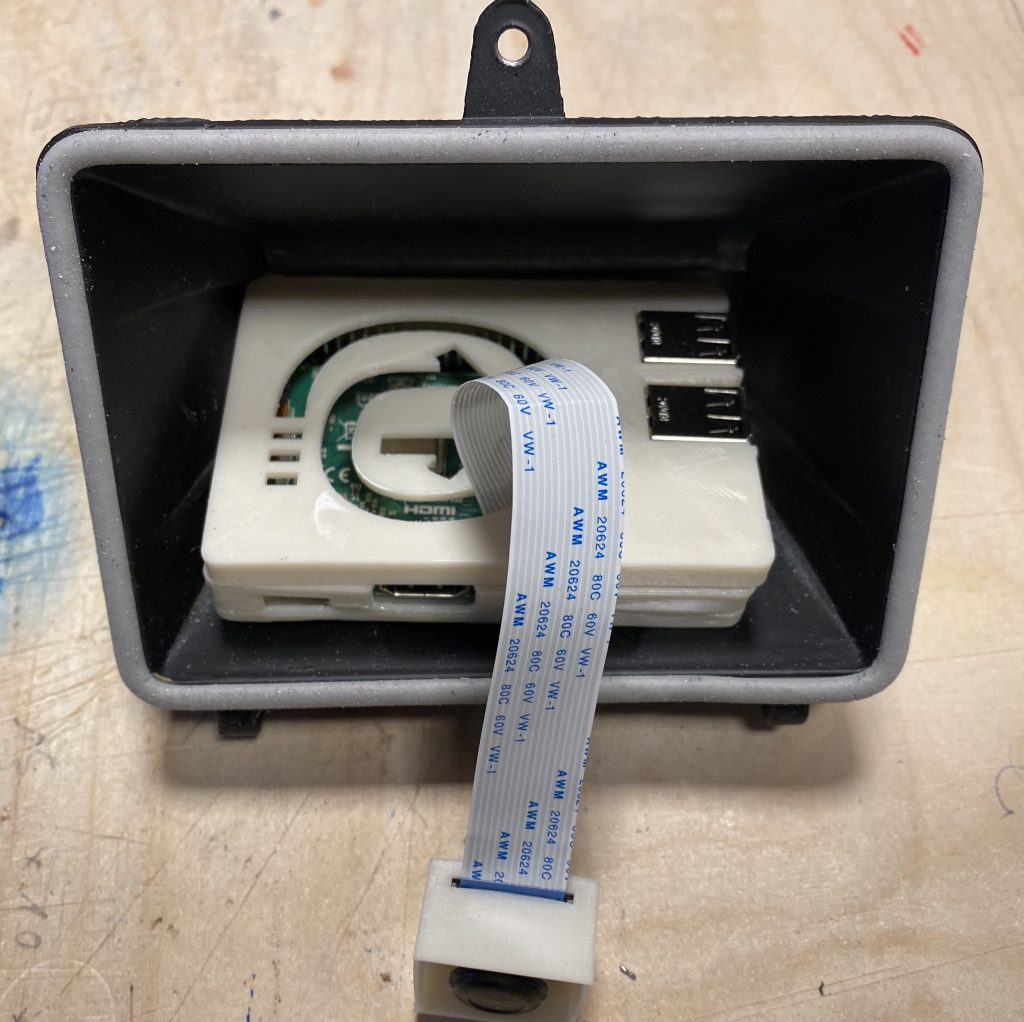
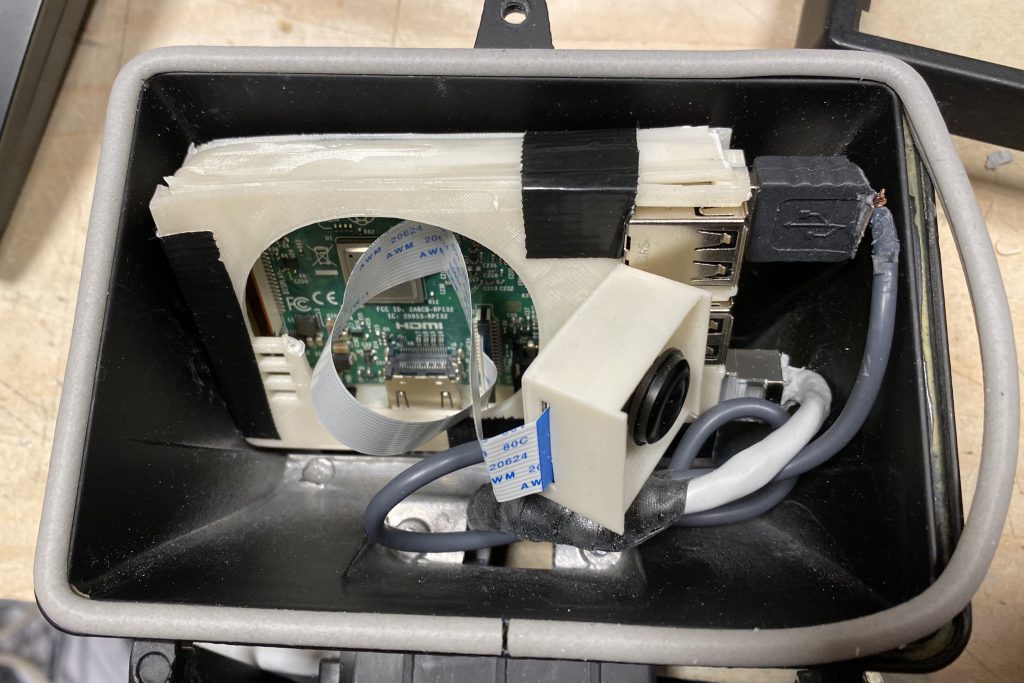
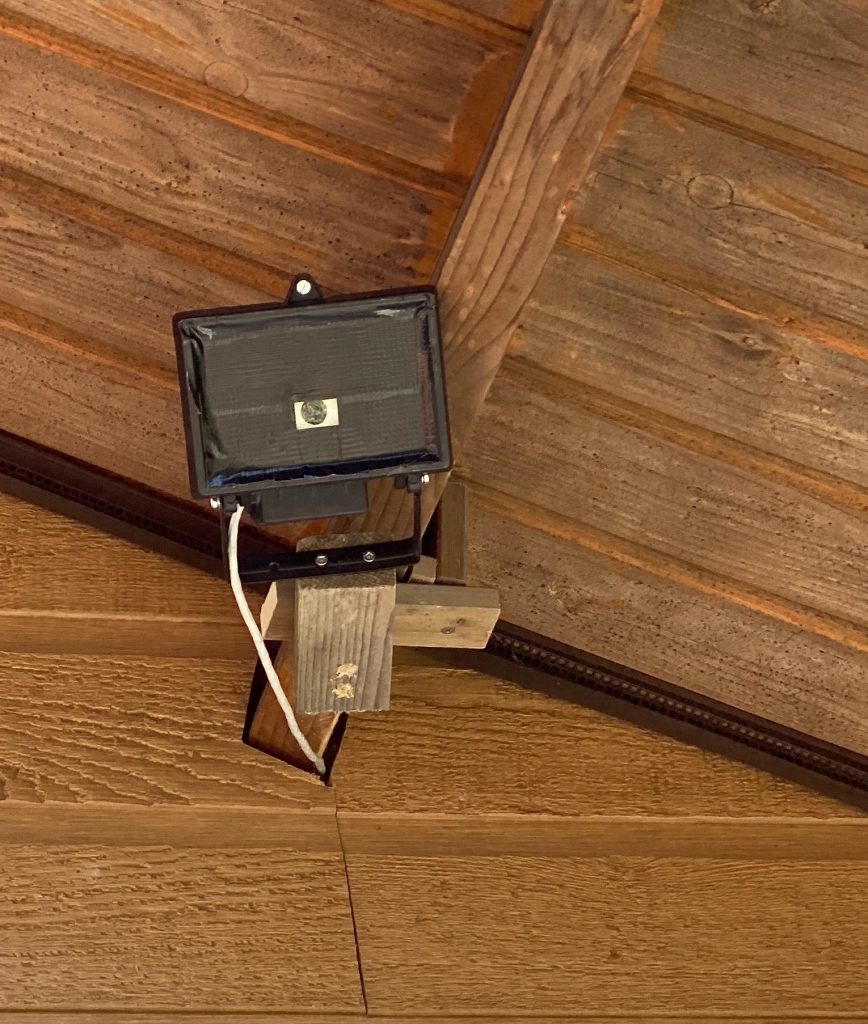
Hier soll im Garten unter dem Laubendach der Raspberry Pi 3 in einem entkernten IP65 Halogenstrahler-Gehäuse mit seiner Webcam und dem Anschluss an eine Ventus Wetterstation zyklisch die Wetterdaten auf eine mit Weewx erzeugte Webseite hochladen. Bei dem letzten Bild sieht man das die Stecker mit der Zange solange bearbeitet worden sind, bis dann der Pi in das Gehäuse gepasst hat.
2 Adern sind mit dem USB der Wetterstation verbunden weitere 2 Adern versorgen den Raspberry PI mit 5V. Das wird über ein Netzteil eingespeist.




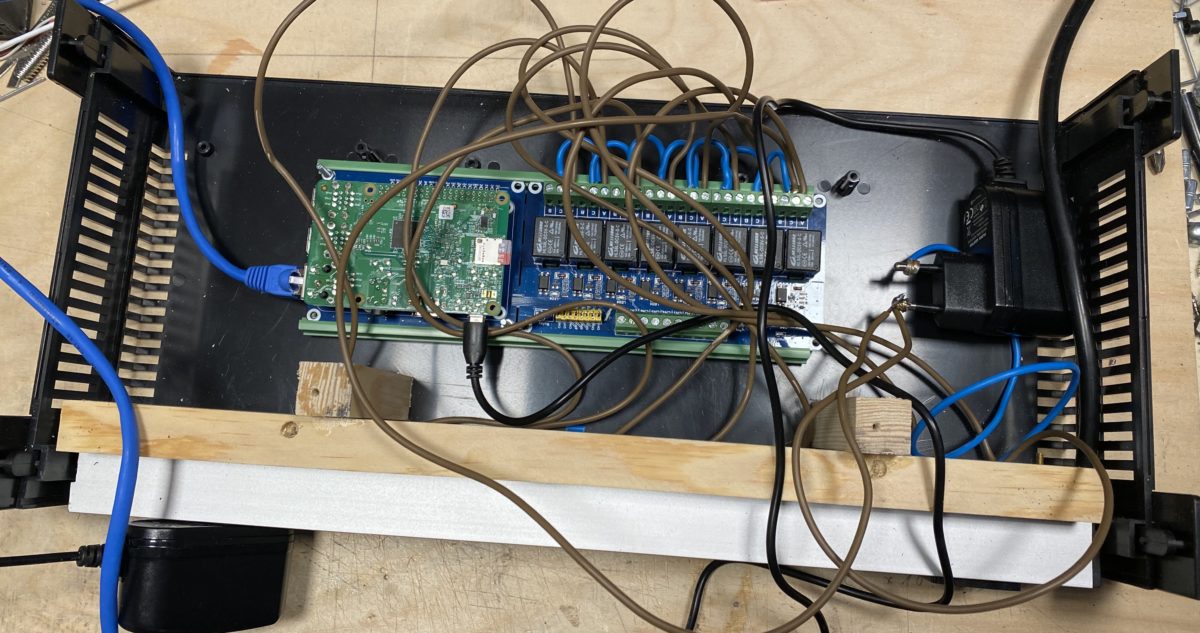
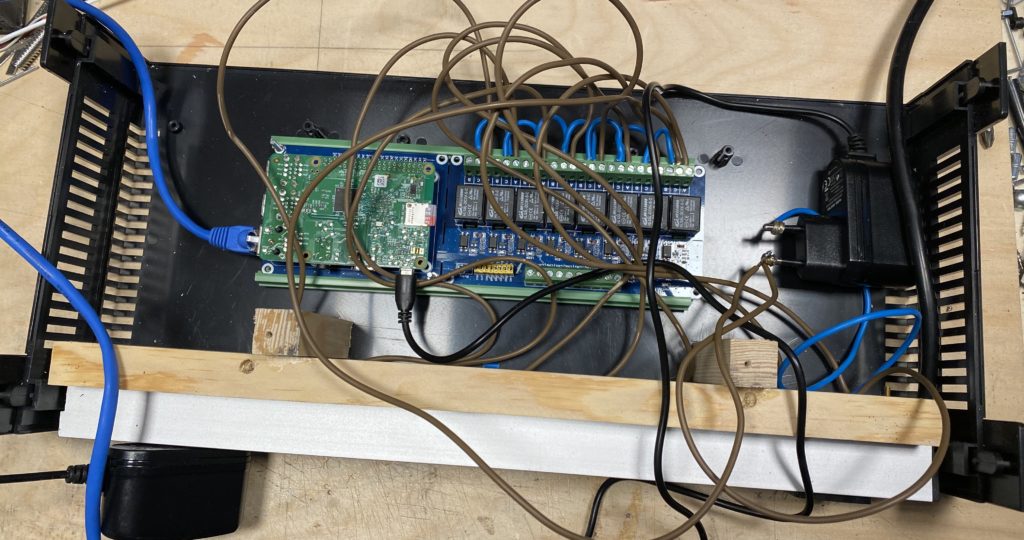


Im Innenleben ein 8-Fach Relayboard mit einem Raspberry Pi 3 als Ansteuerung
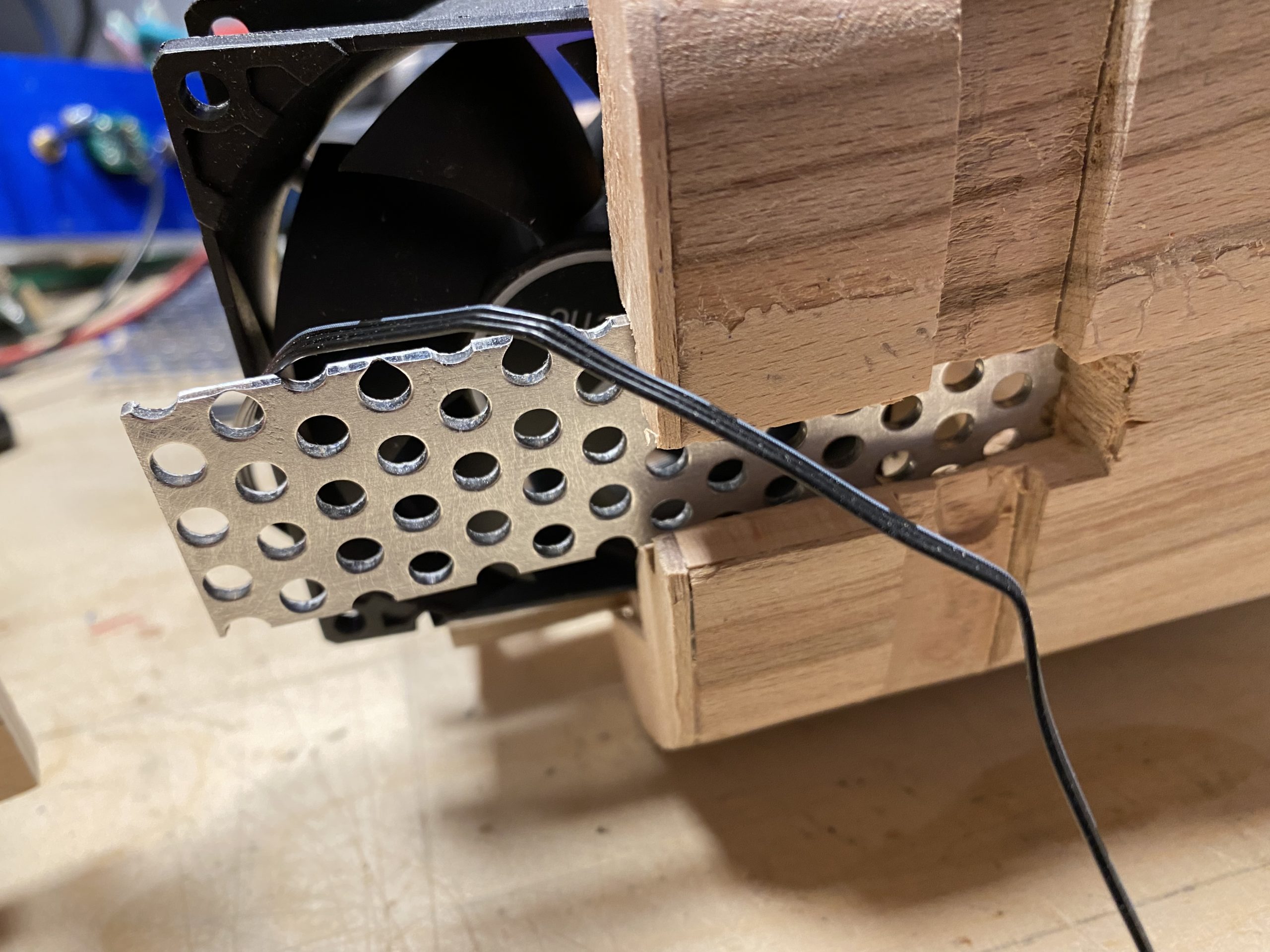
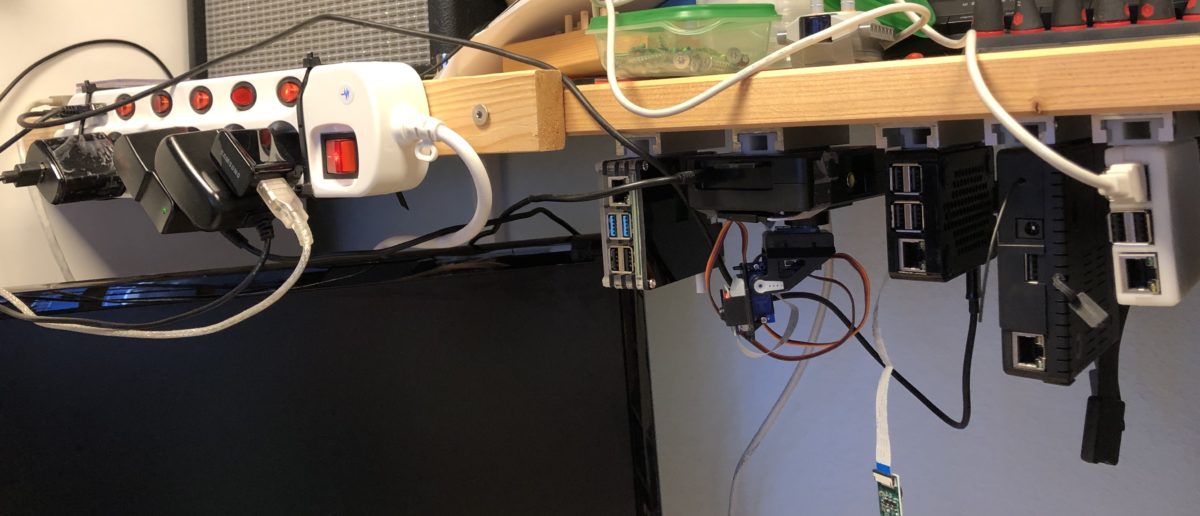
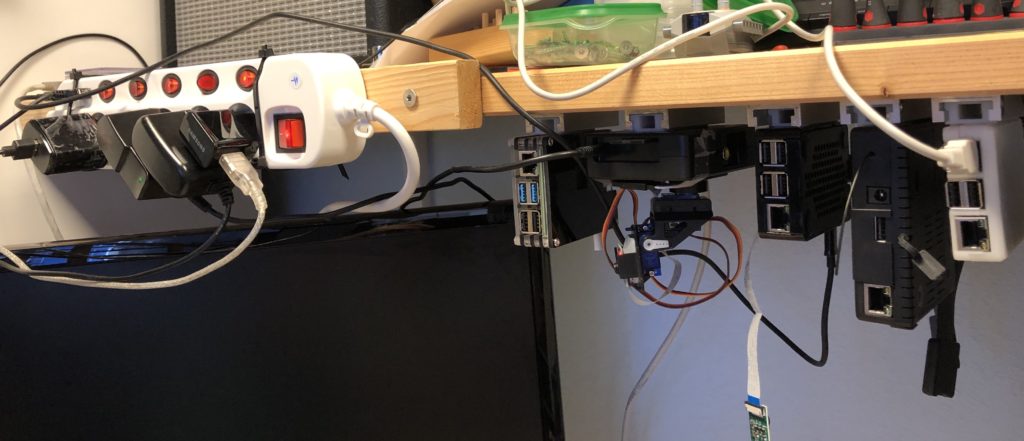
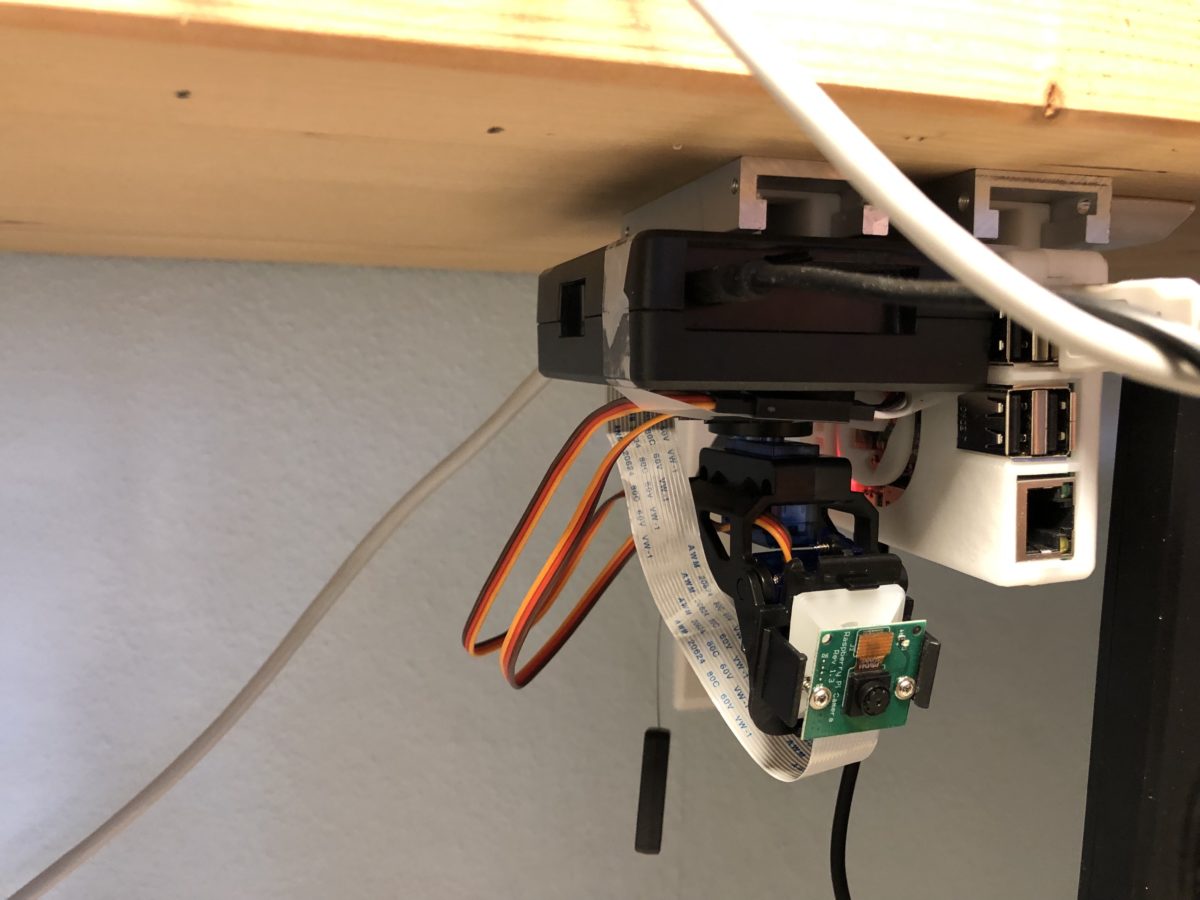
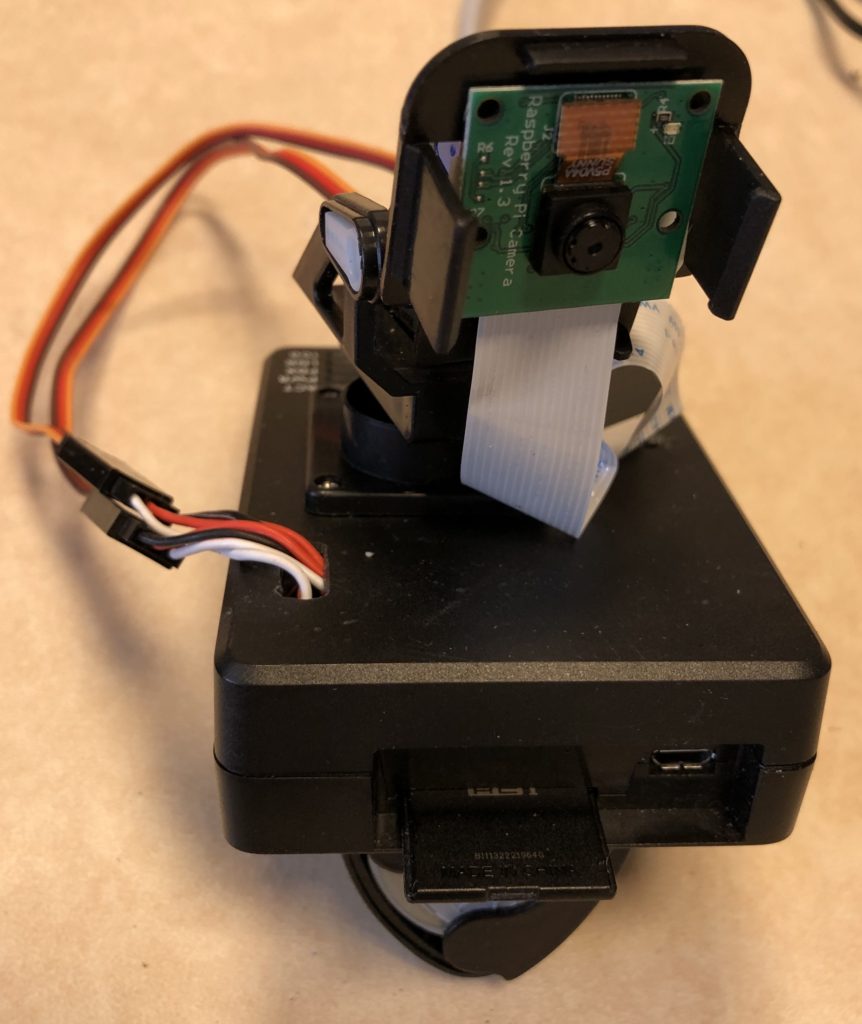
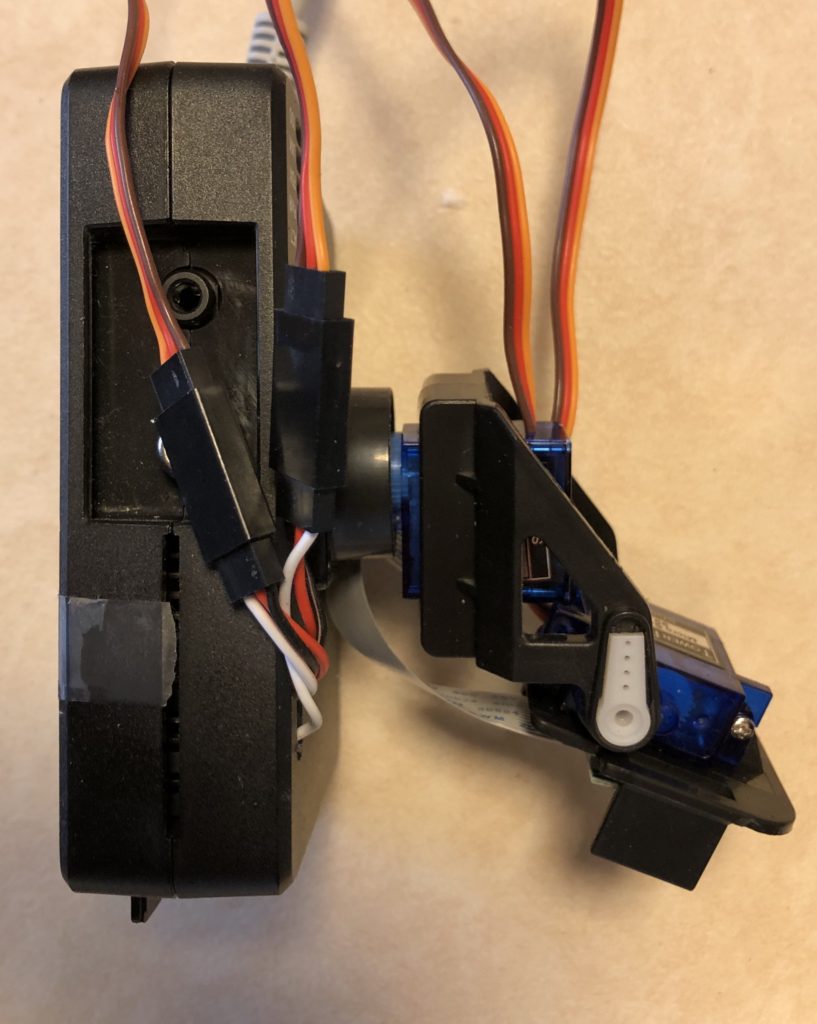
Auf dem rechten Bild sieht man die Flachbandkabel der Raspberry Pi Cam’s herausschauen













Ja demnächst nach dem die Teile in der Drehbank angepasst sind mehr



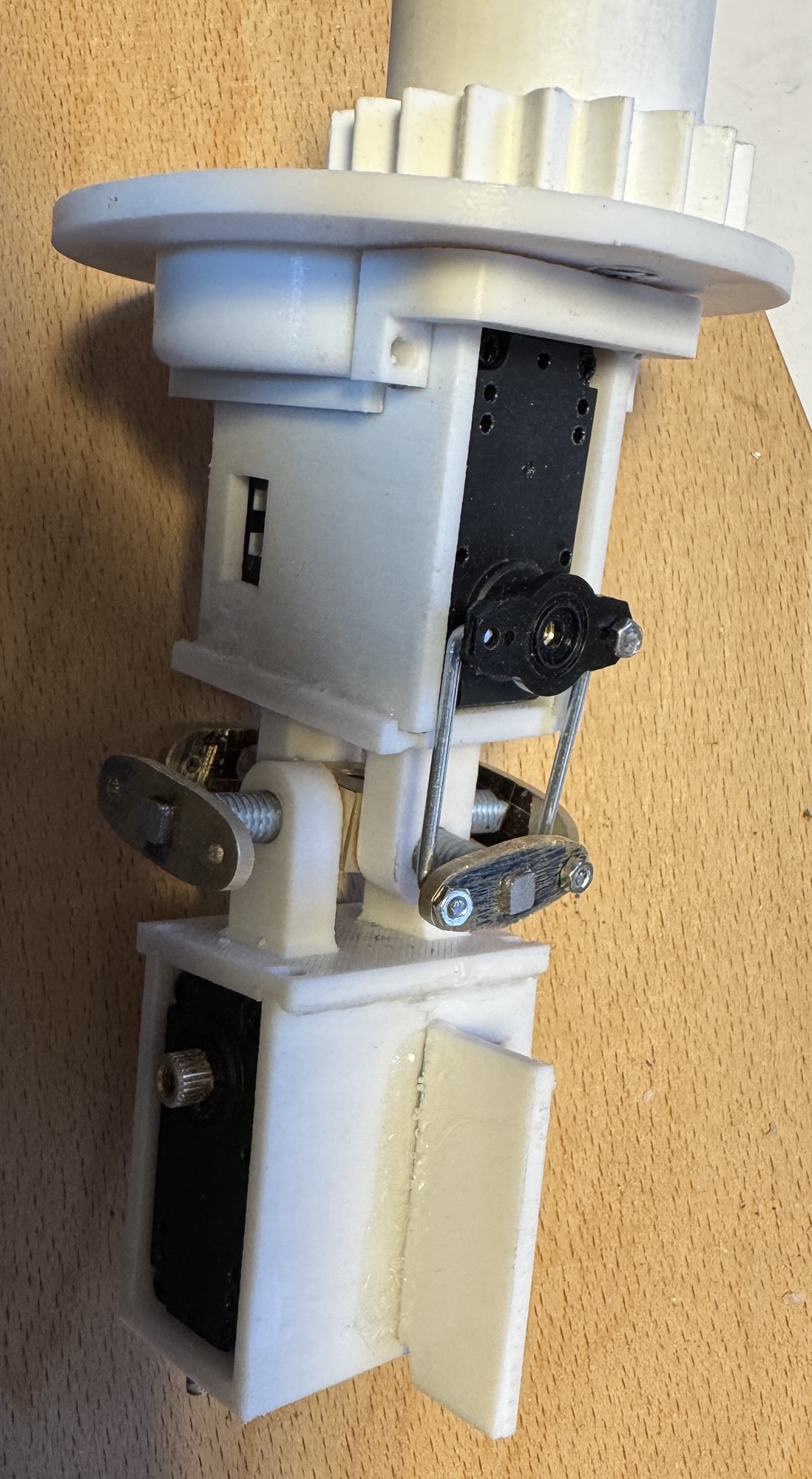
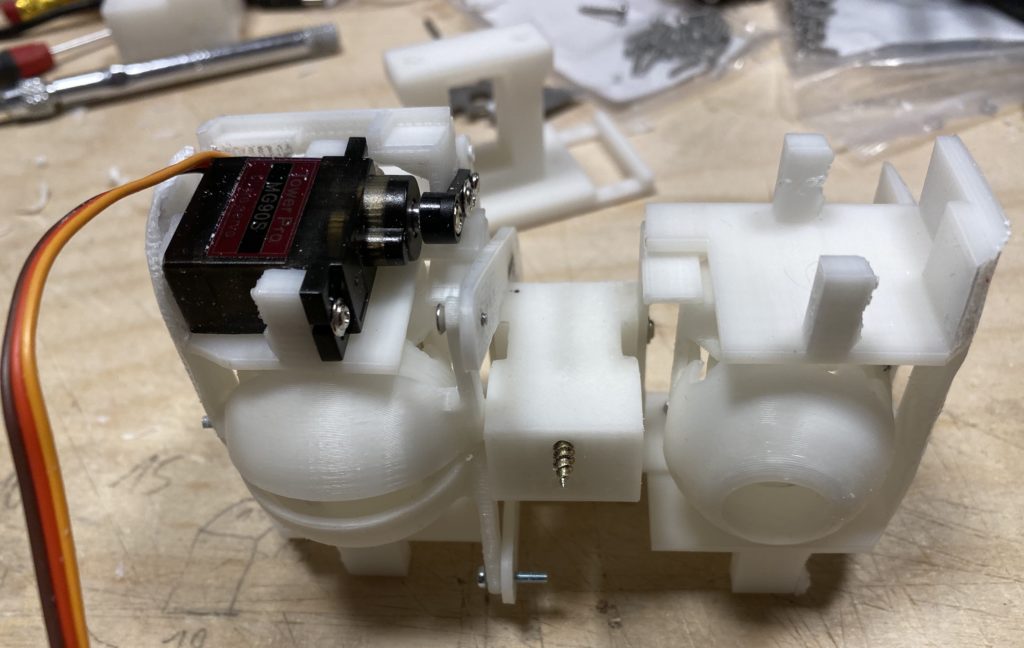
Beim neuen Hals läuft die Mechanik ohne größere Reibung
Die neue Version ist optimiert und ich musste keine größeren manuellen Arbeiten daran vornehmen. Leichter ist sie auch









Nur der Wetterbericht wird online geholt

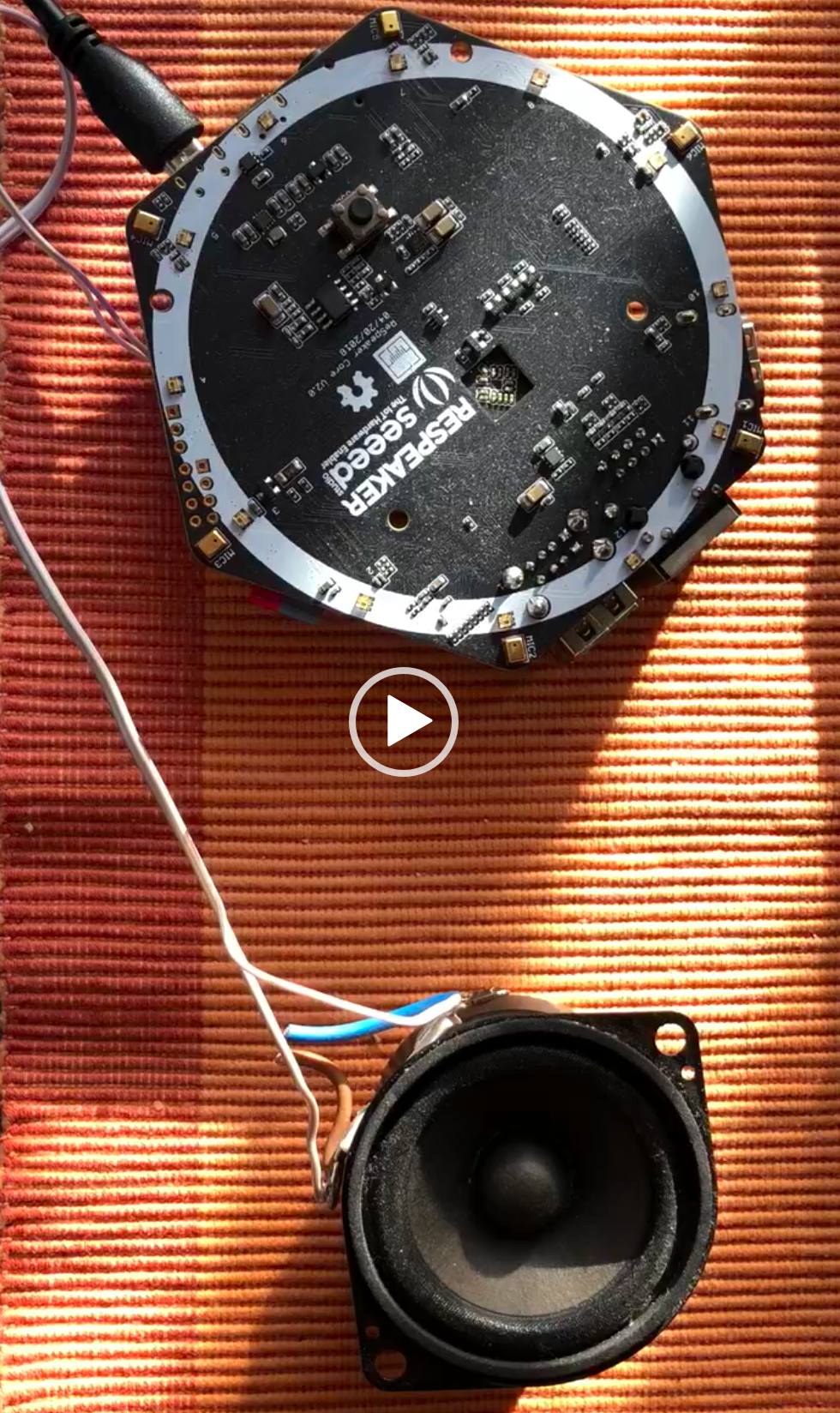
Nun mal wieder etwas vom Ky. Er hört jetzt Offline auf seinen Namen.
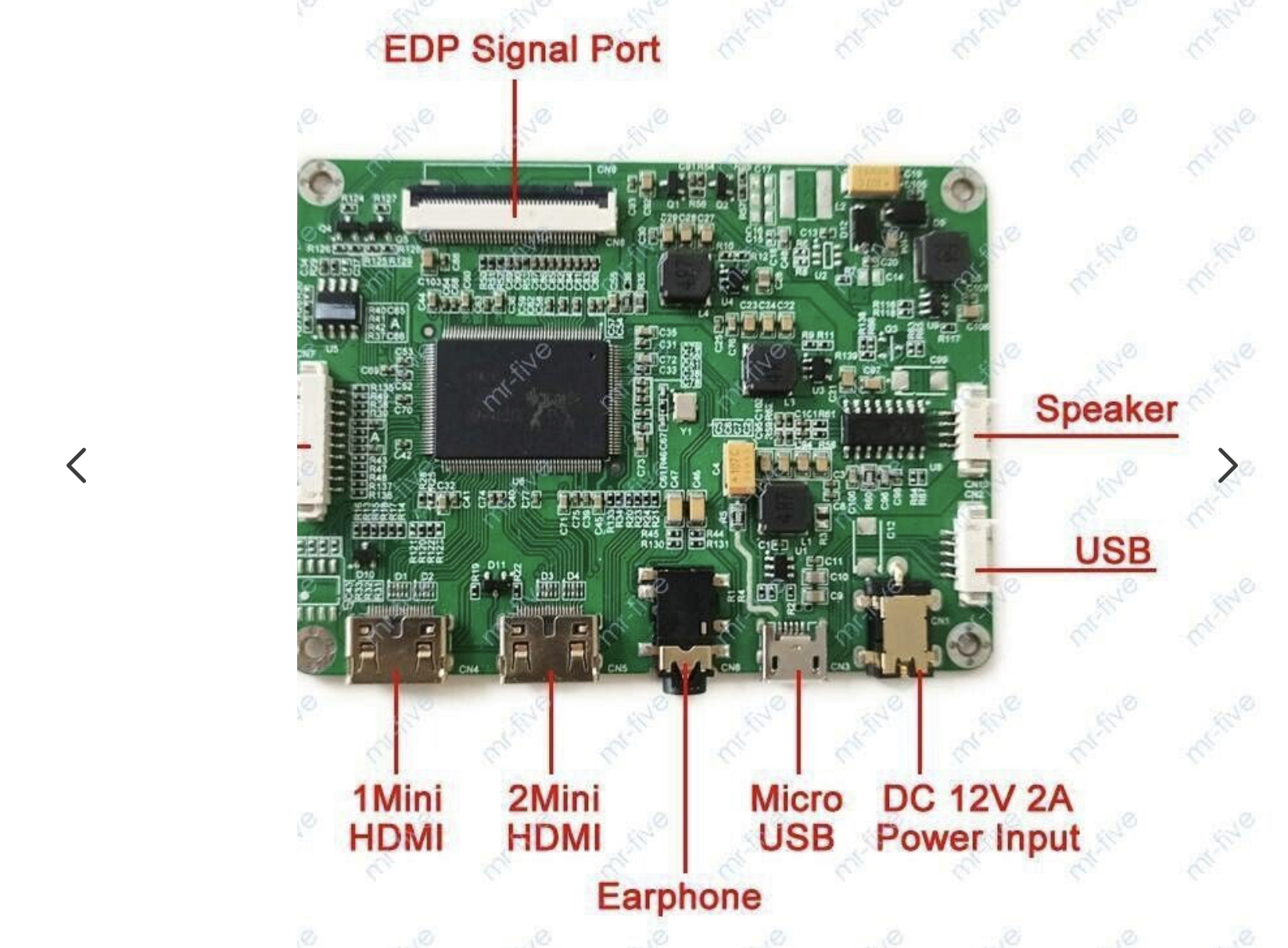
Das Ganze wird durch den Seeed Respeaker core V2 realisiert mit
einem Raspbian onbord.
Die Spracherkennung erfolgt durch die Software snips komplett offline nachdem man
im Internet auf deren Webseite entsprechende Dateien erzeigt hat.
Zum Beispiel habe ich gesagt: Kai hebe den rechten Arm
Dann erfolgt folgendes:
Watching on localhost:1883 (MQTT)
[Hotword] detected on site default, for model kai
[Asr] was asked to stop listening on site default
[[Hotword] was asked to toggle itself ‚off‘ on site default
[Dialogue] session with id ‚ce08d1ea-ace7-4cbd-8bb4-e6db248d319b‘ was started on site default
[Asr] was asked to listen on site default
[Asr] captured text „hebe den rechten arm“ in 3.0s
[Asr] was asked to stop listening on site default
[Nlu] was asked to parse input „hebe den rechten arm“
[Nlu] detected intent dsgra:heben with probability 1.000 for input „hebe den rechten arm“
Slots ->
SEITE_rechts -> rechts
KT_Arm -> Arm
[09:14:32] [Dialogue] New intent detected dsgra:heben with probability 1.000
Slots ->
SEITE_rechts -> rechts
KT_Arm -> Arm
Jetzt fehlt nur noch eine entsprechende Umsetzung der Befehle
Hi ich habe im Internet die Webseite snips.ai ausfindig gemacht.
Die stellen ein Portal zur Verfügung wo man einen eigenen Assistenten anlegen kann.
Dieser kann dann offline !!!! die entsprechenden Sätze und Worte verstehen.
Das ganze hat Intents und Skills .
Zuerst spreche ich das sogenannte Wake oder Hotword, in meinem Fall Ky (Kai) und dann den Satz drehe den Rumpf nach links.
drehe den [Rumpf](KT_Rumpf) nach [links](SEITE_links)
thomas sagt drehe [beide](SEITE_beide) [Arme](KT_Arm)
thomas sagt drehe den [linken](SEITE_links) [Arm](KT_Arm)
drehe Deinen [Kopf](KT_Kopf) nach [rechts](SEITE_rechts)
drehe Deinen [Kopf](KT_Kopf) nach [links](SEITE_links)
So lange nichts in den Blog gestellt,
ich habe mir für den Raspberry Pi eine Stimme für 20$ gekauft
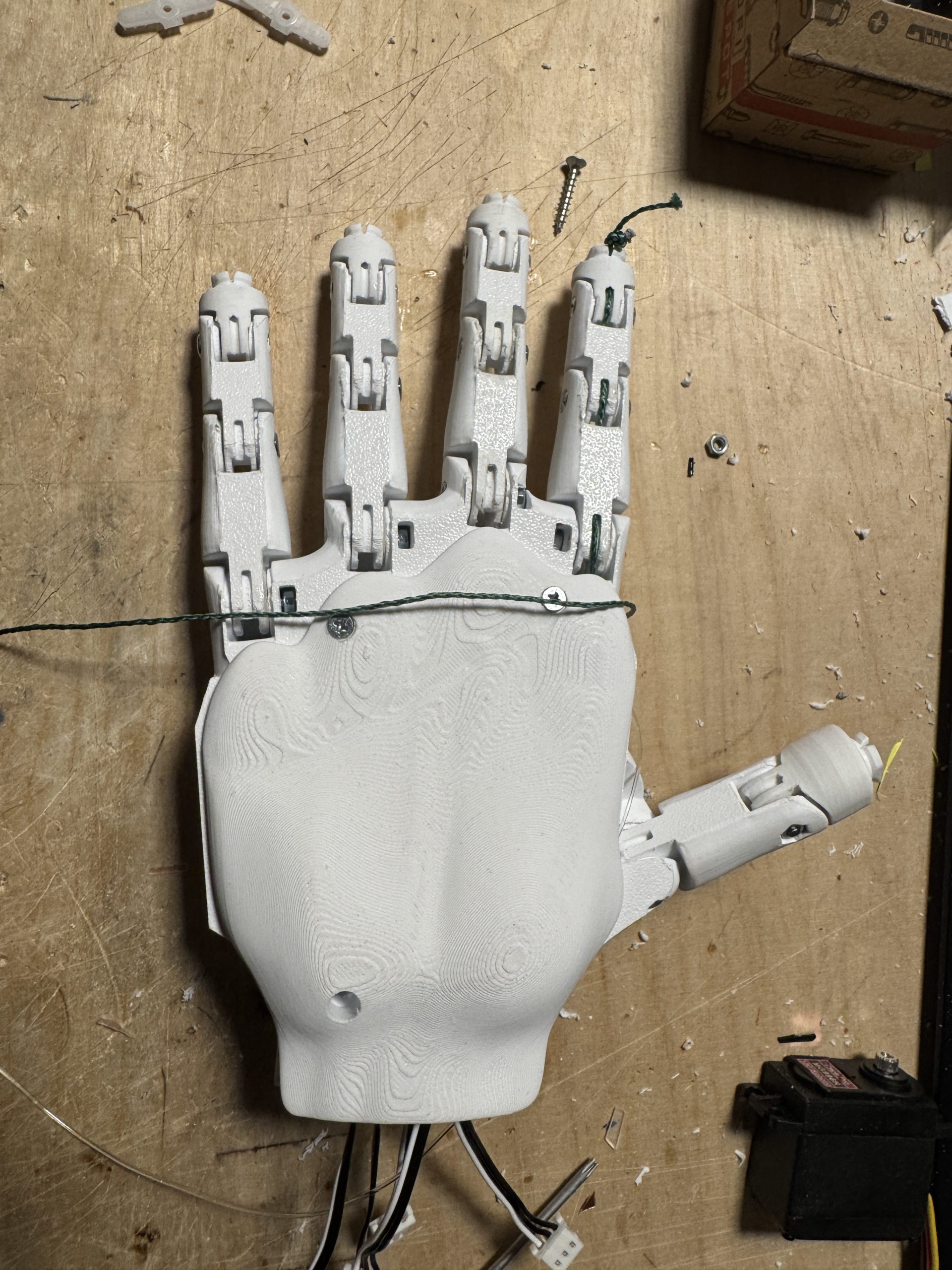
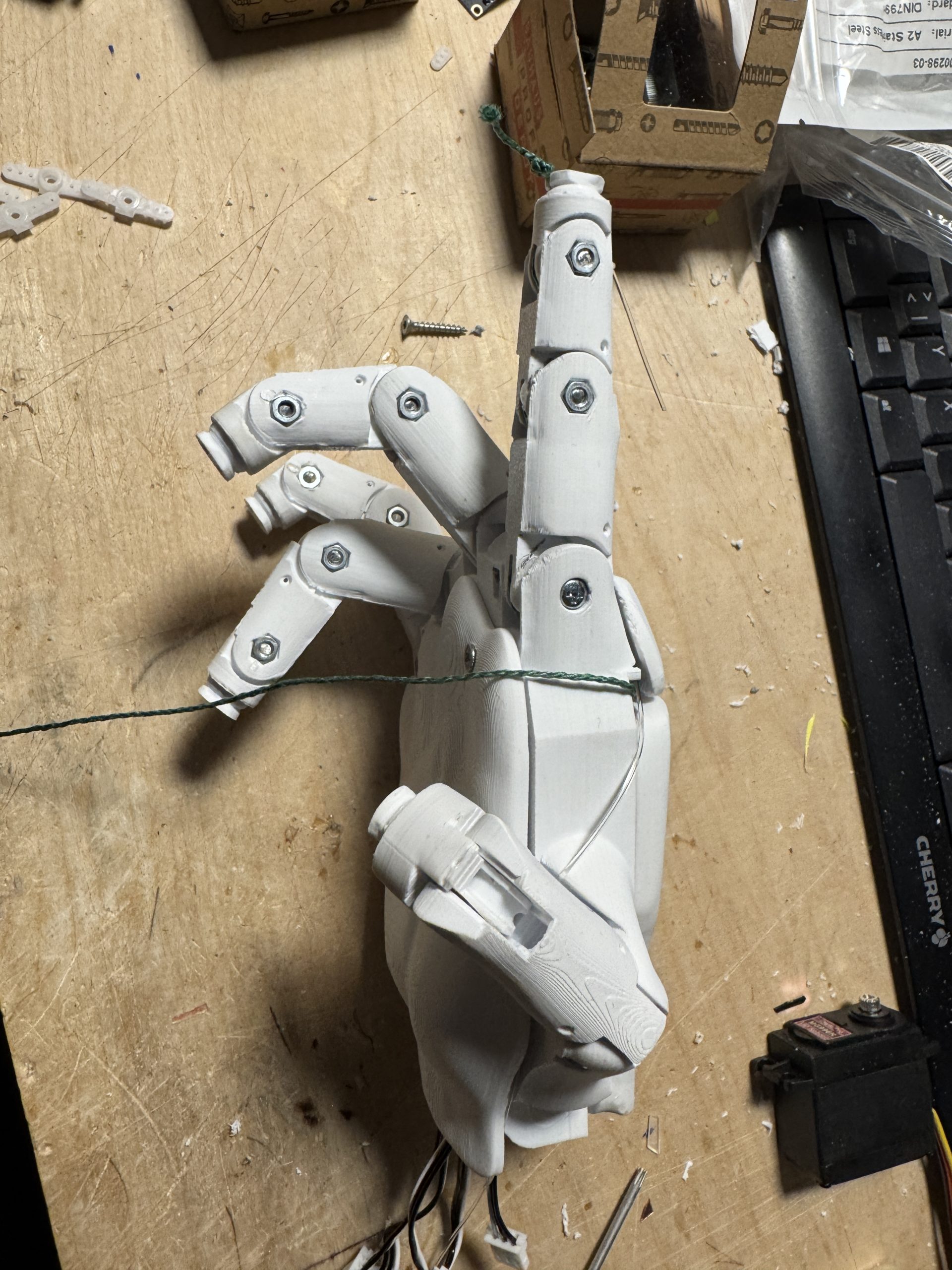
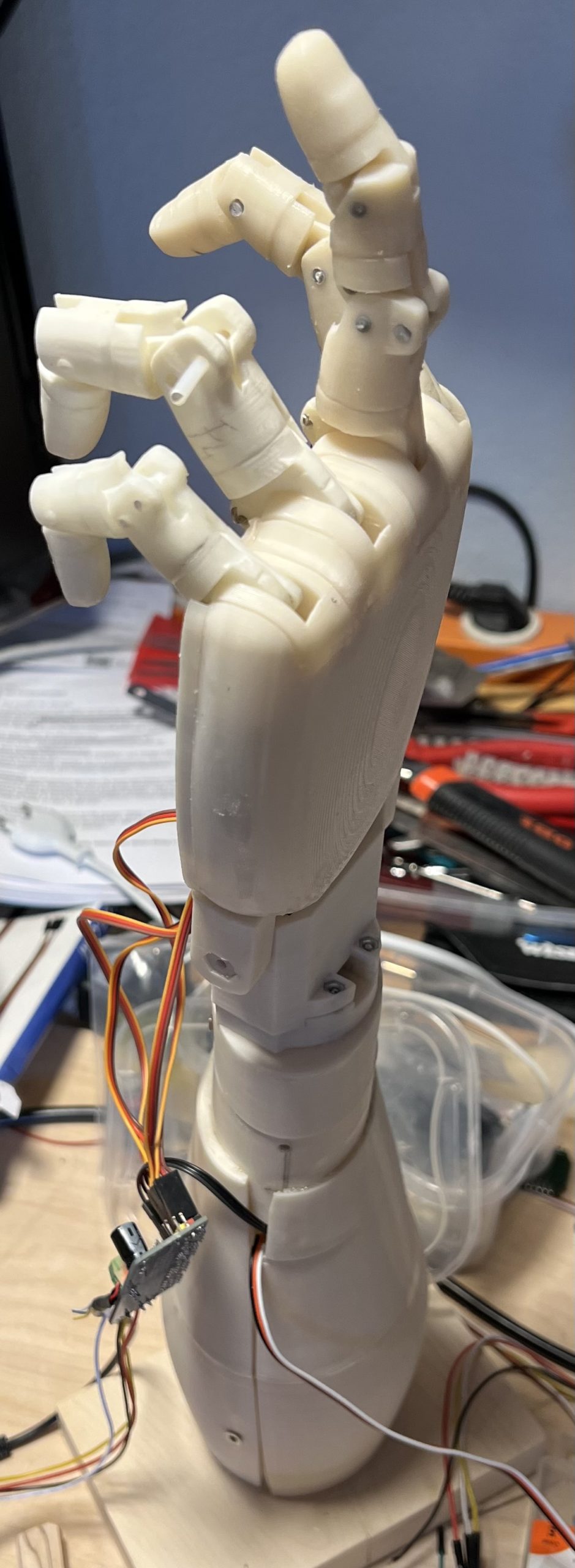
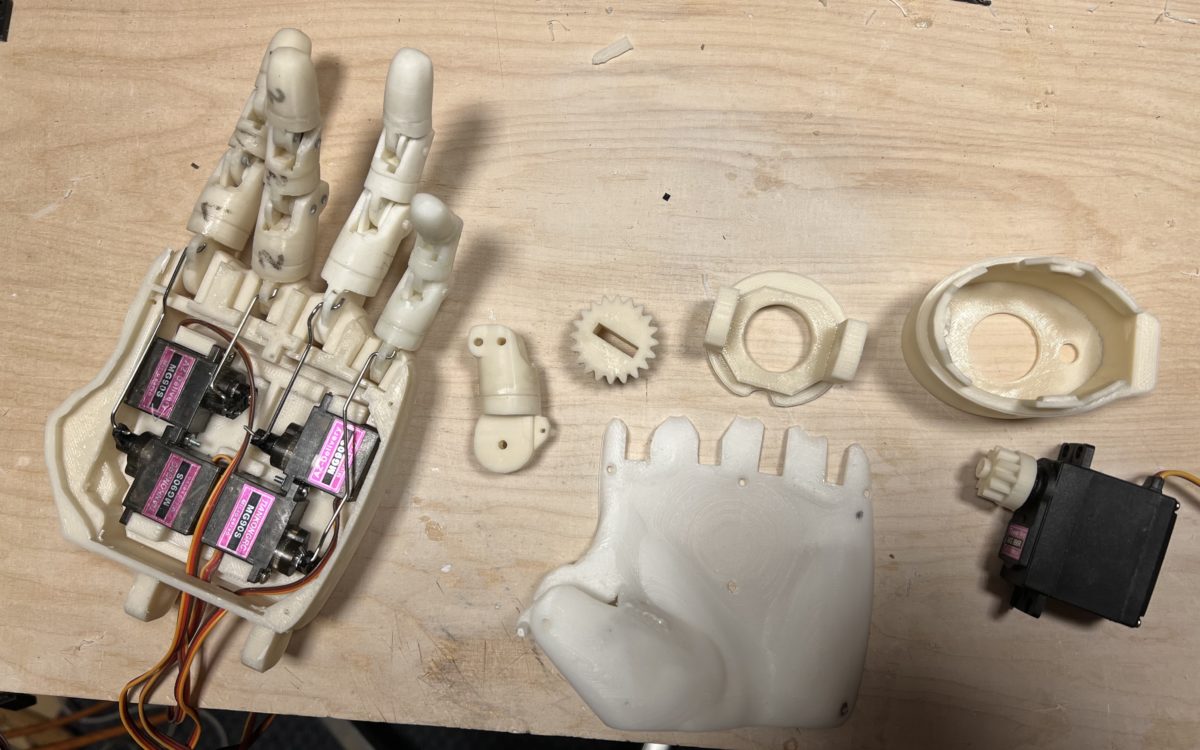
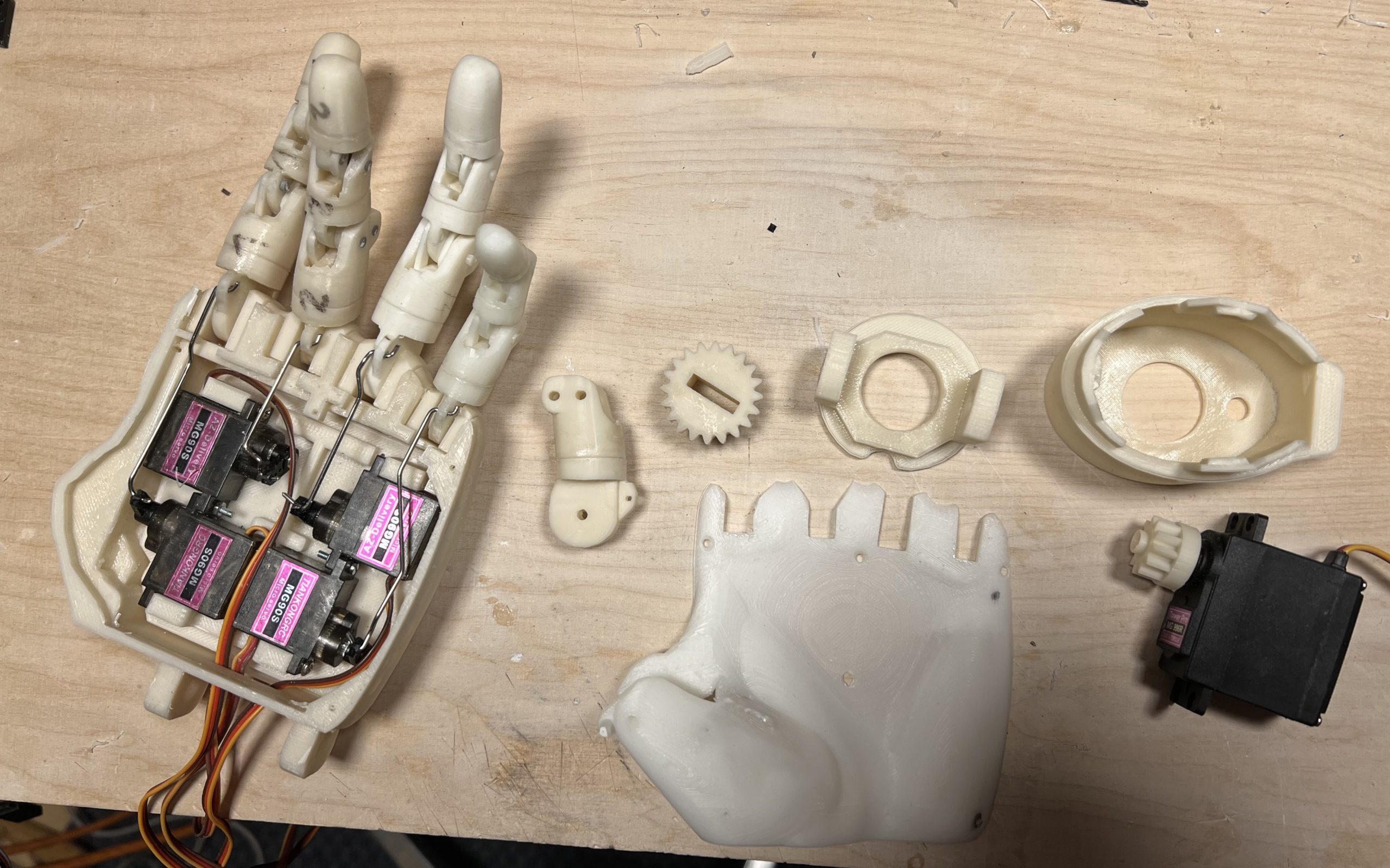
Das ist die aktuellste Version des Palm

Das waren die ersten Entwürfe


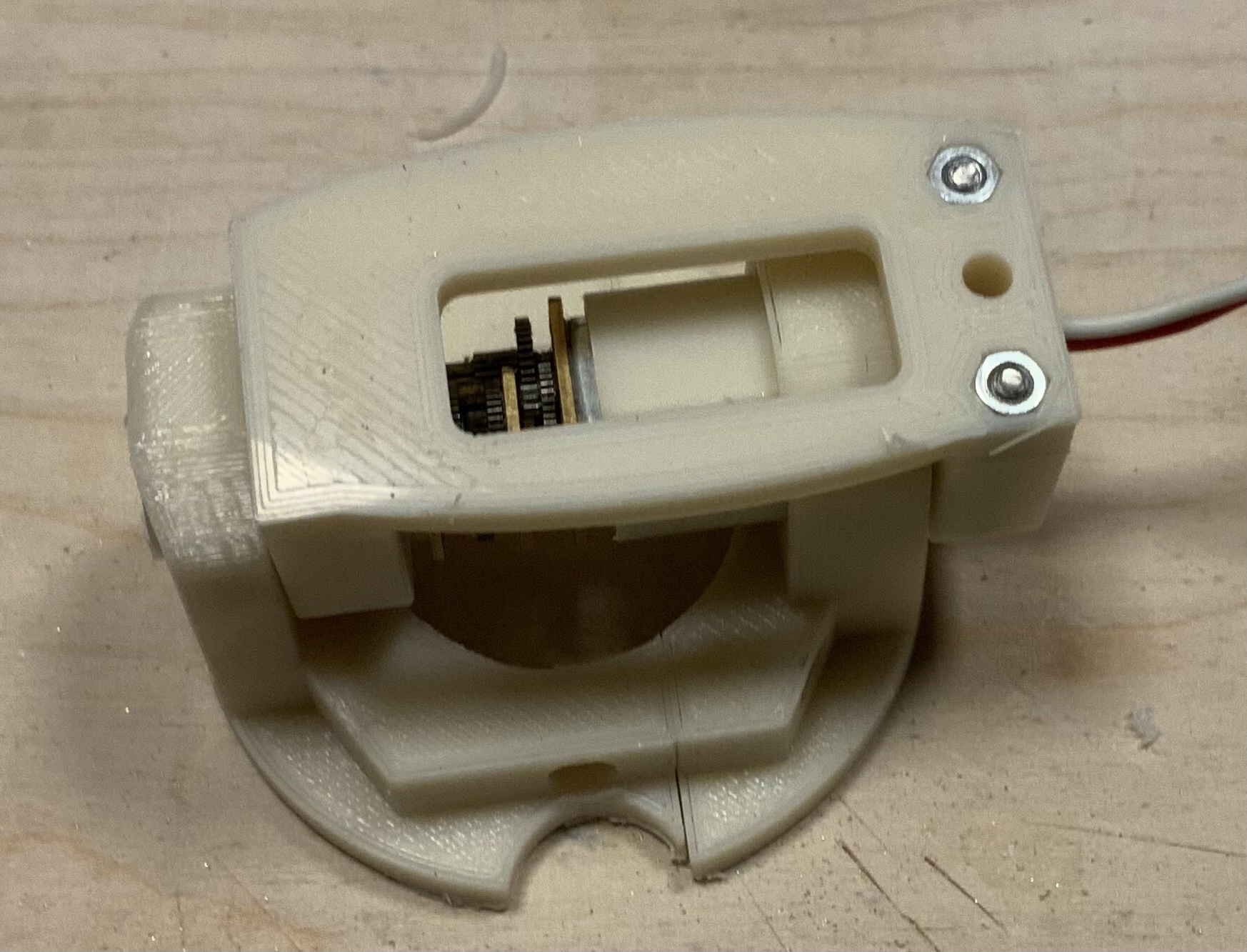
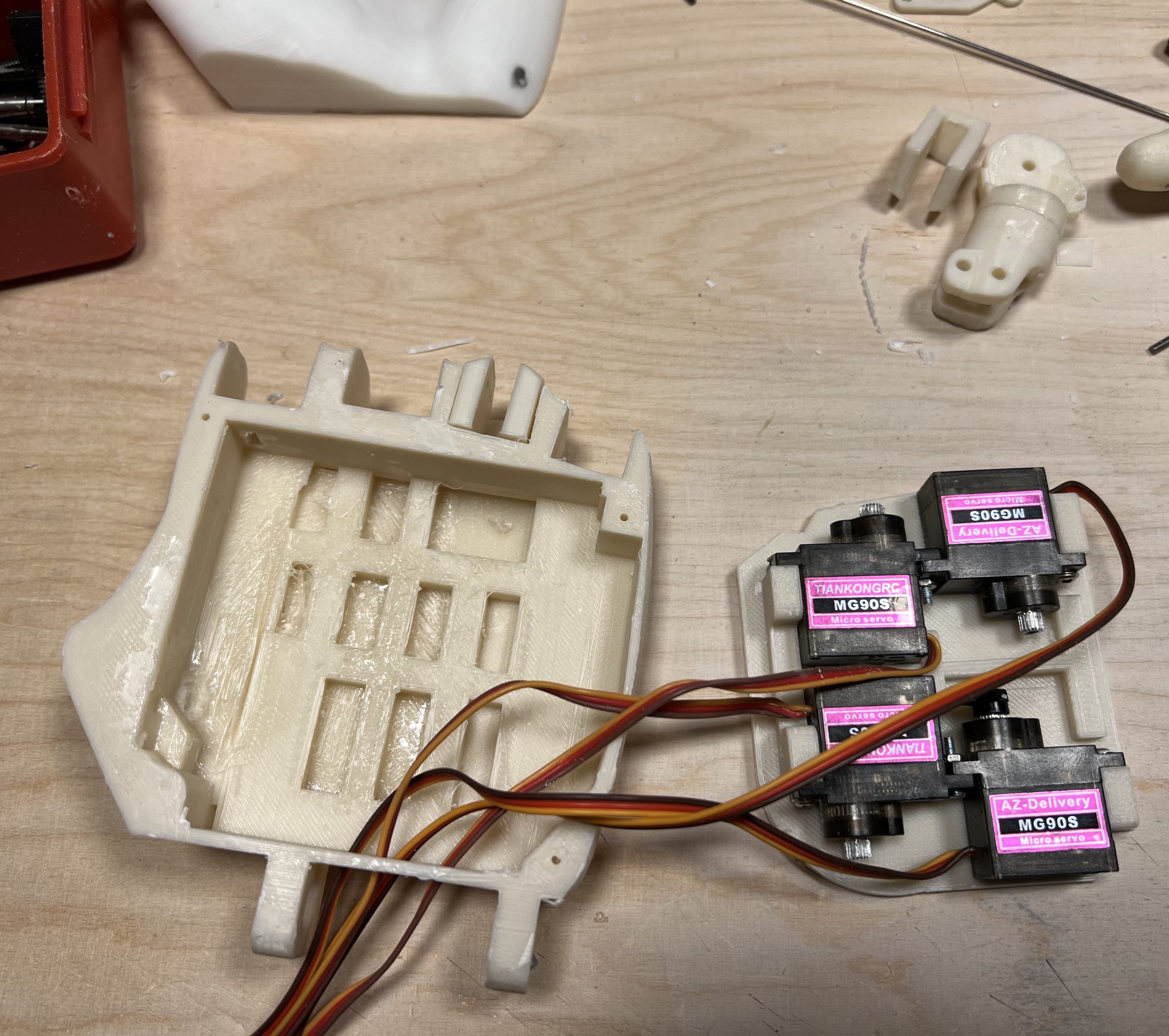
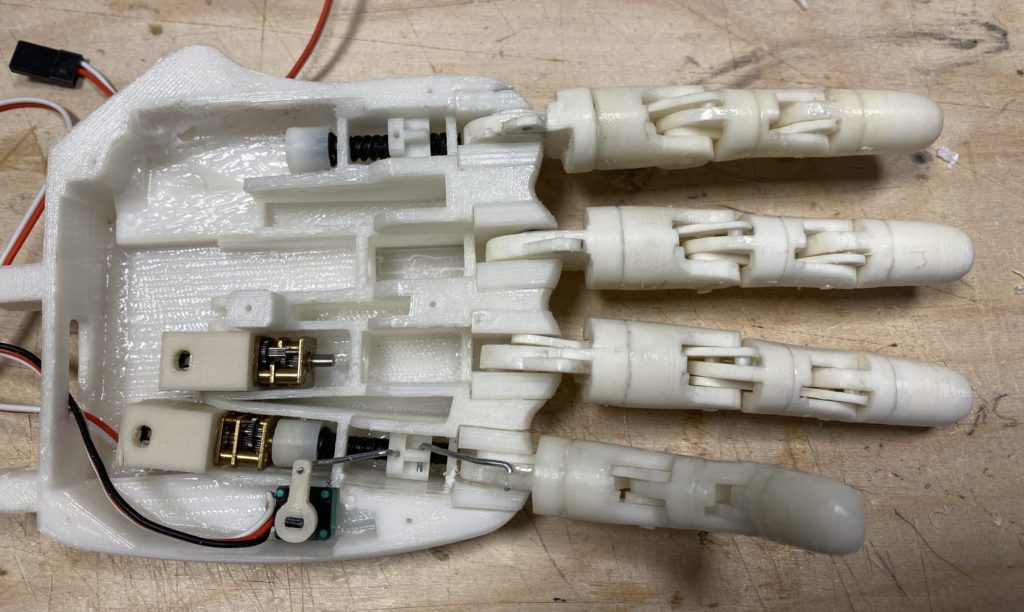
Ich habe mal nen Palm erstellt wo die Motoren Platz haben

Der Daumen ist noch am werden




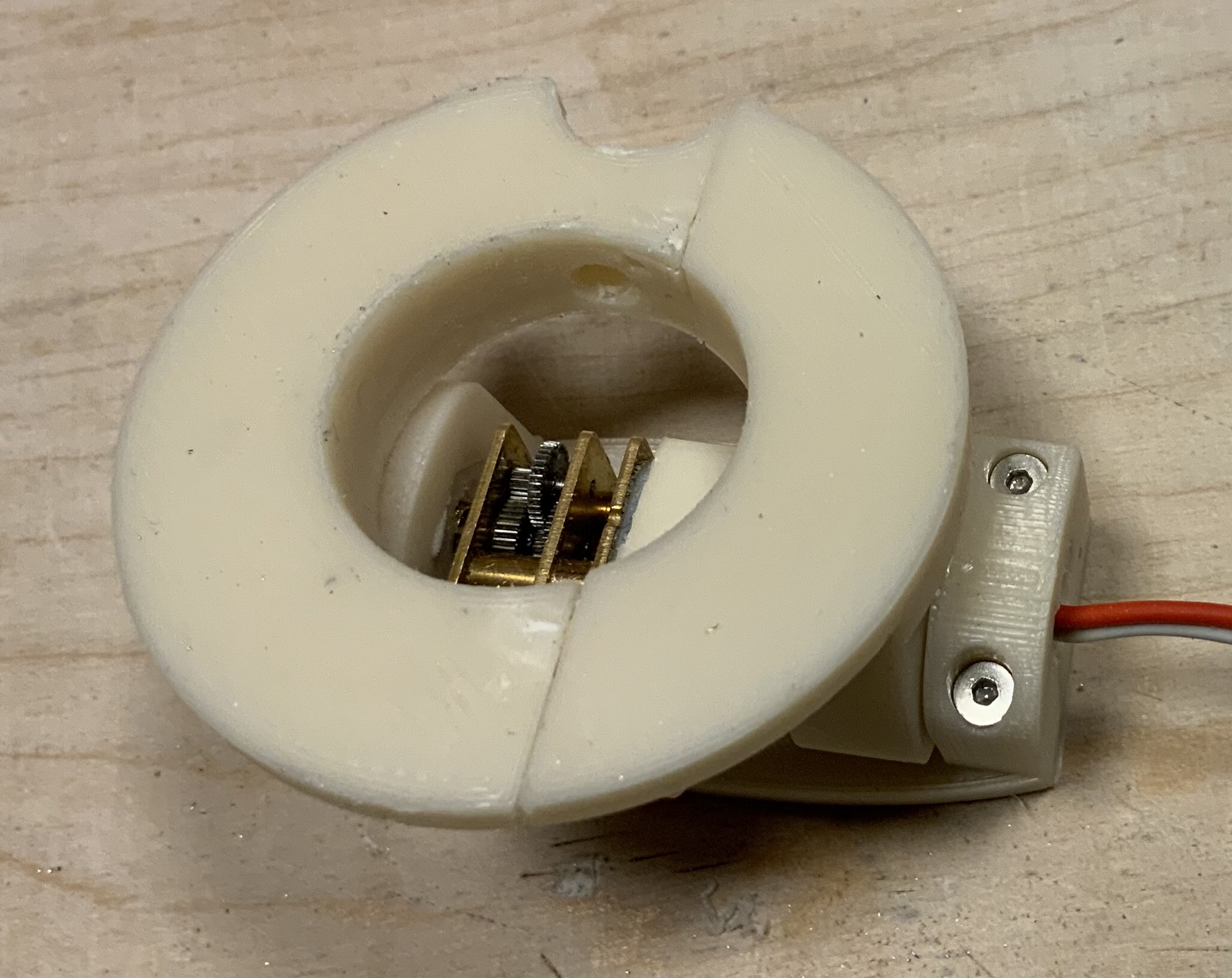
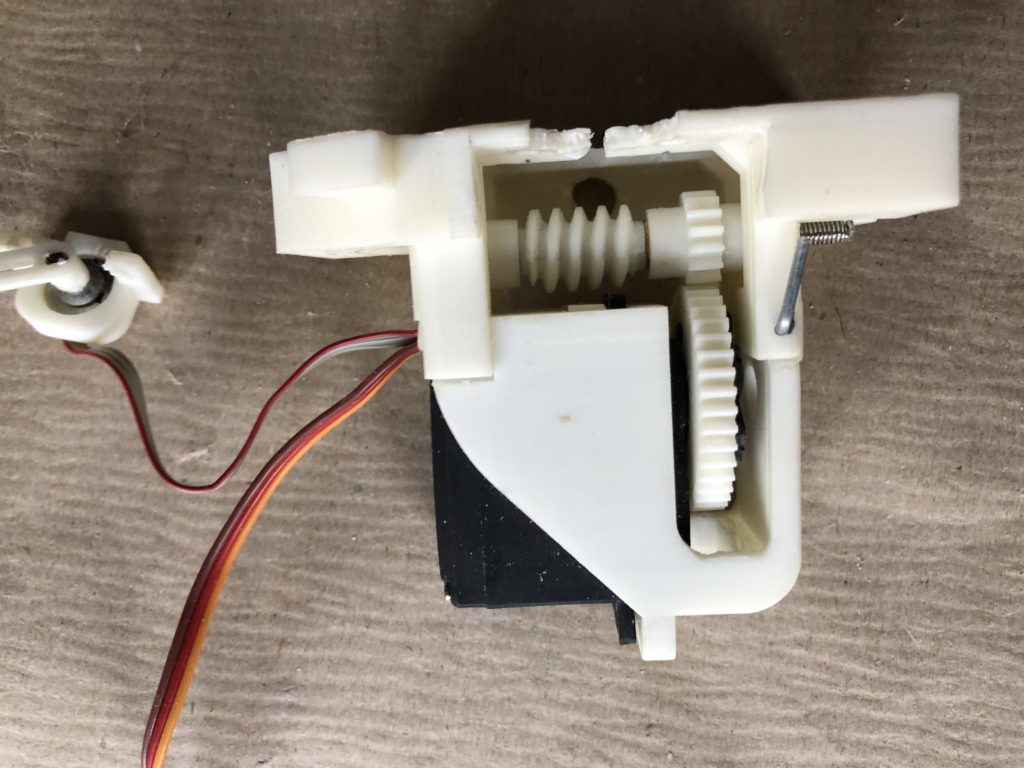
Das Getriebe mit dem Mitnehmer für die Achse und der Motor
Die Achse für den Oberschenkel am beweglichen Teil

Noch ein bischen wackelig aber ansonsten ok

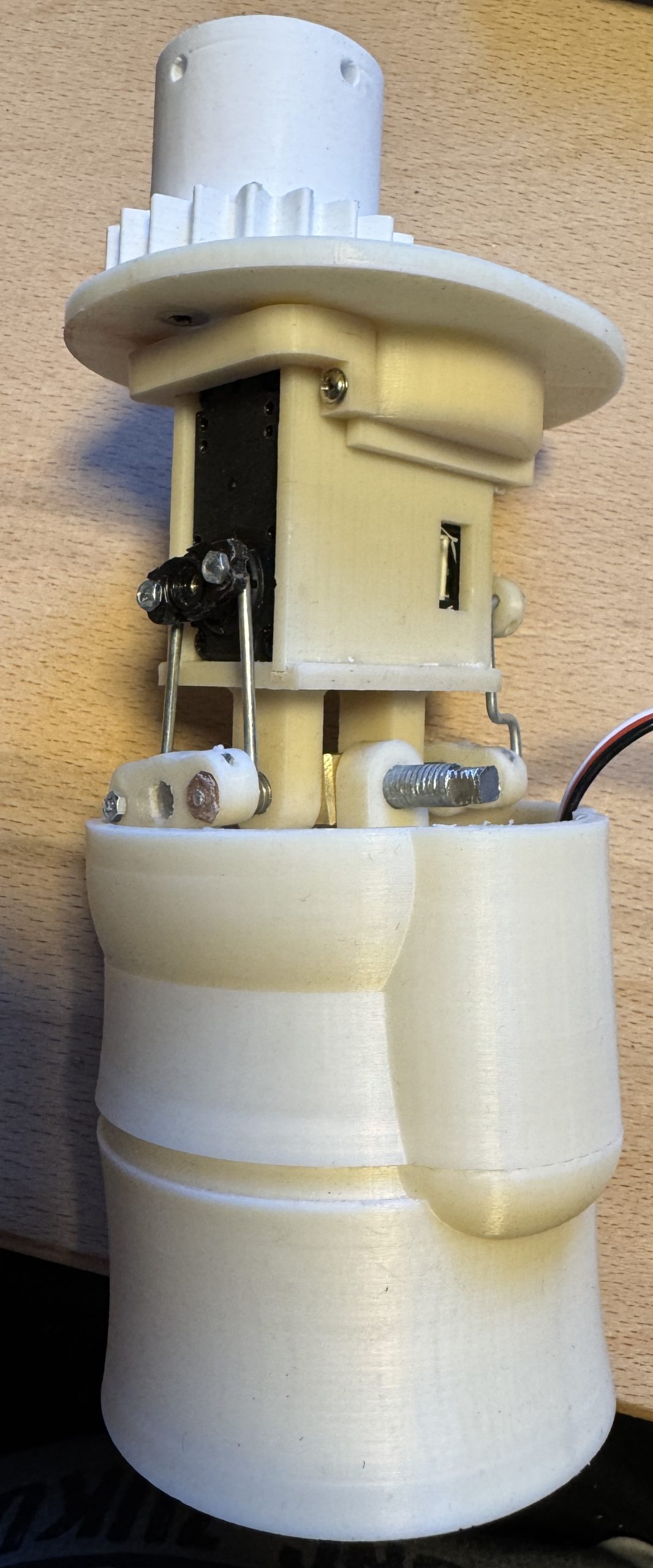
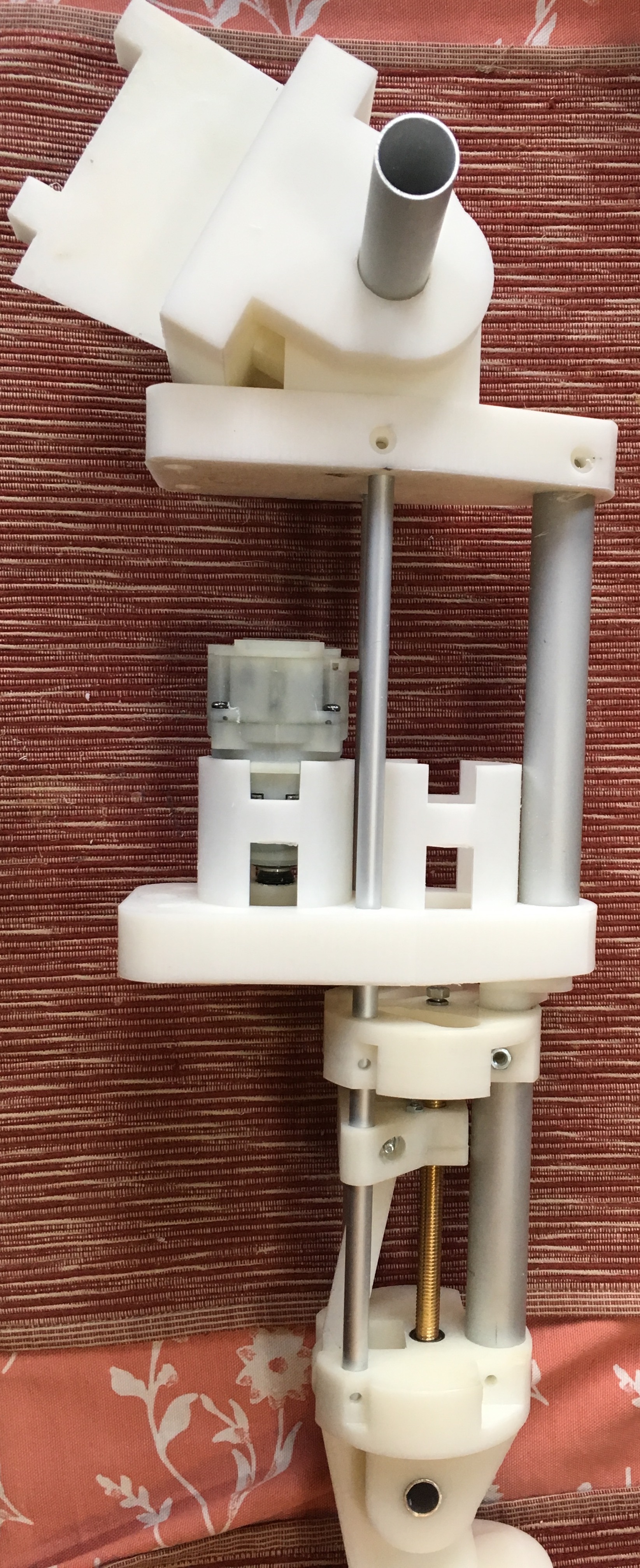
So nun habe ich mal einen Motor mit Getriebe von Makita bestellt
Dieser hat genügend Power um den Körper zu halten
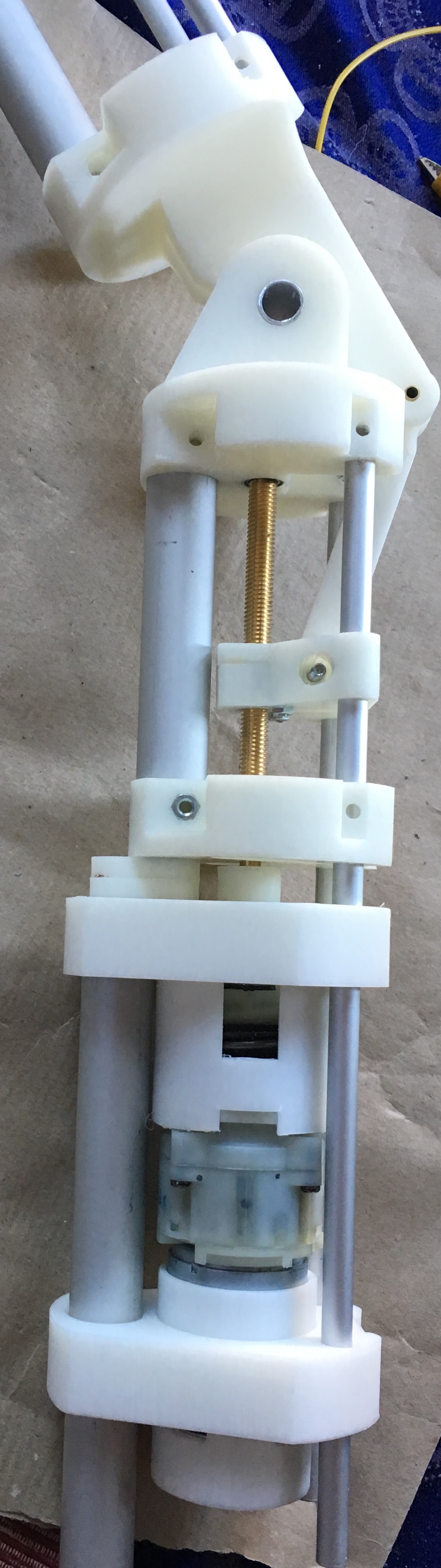
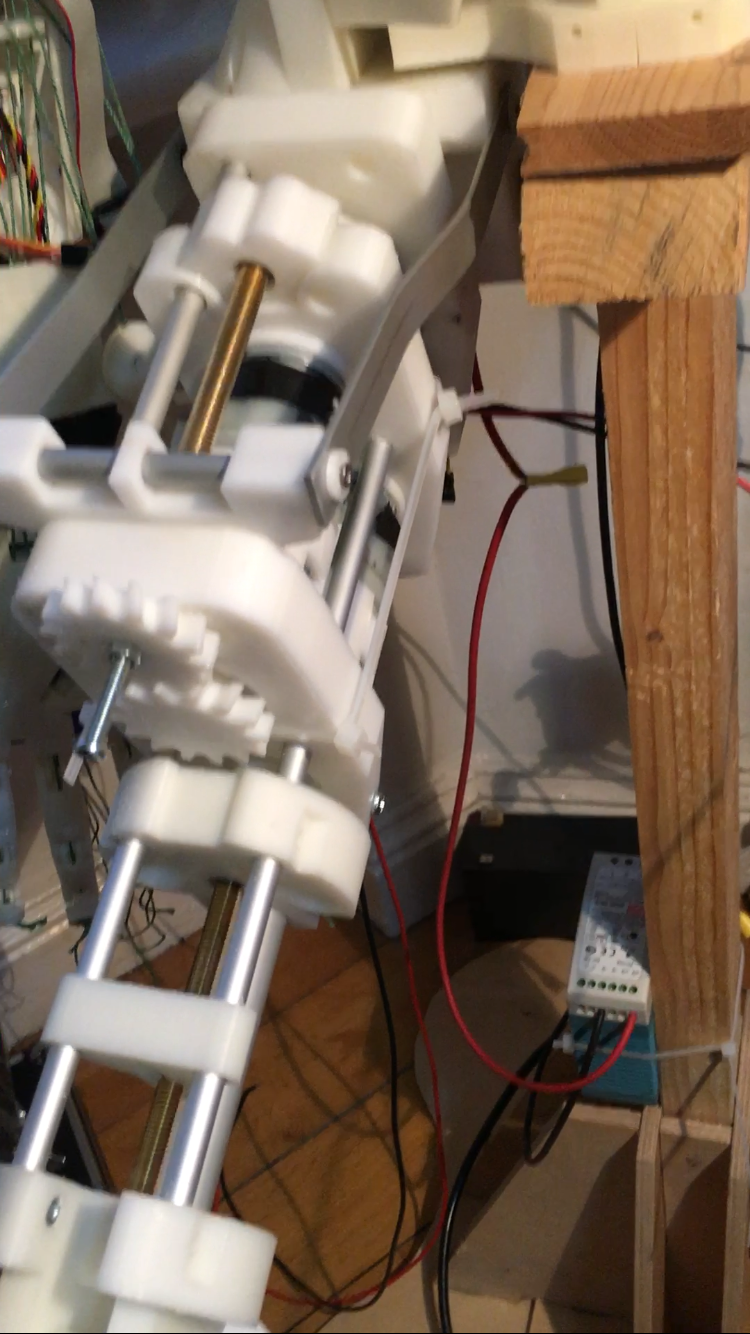
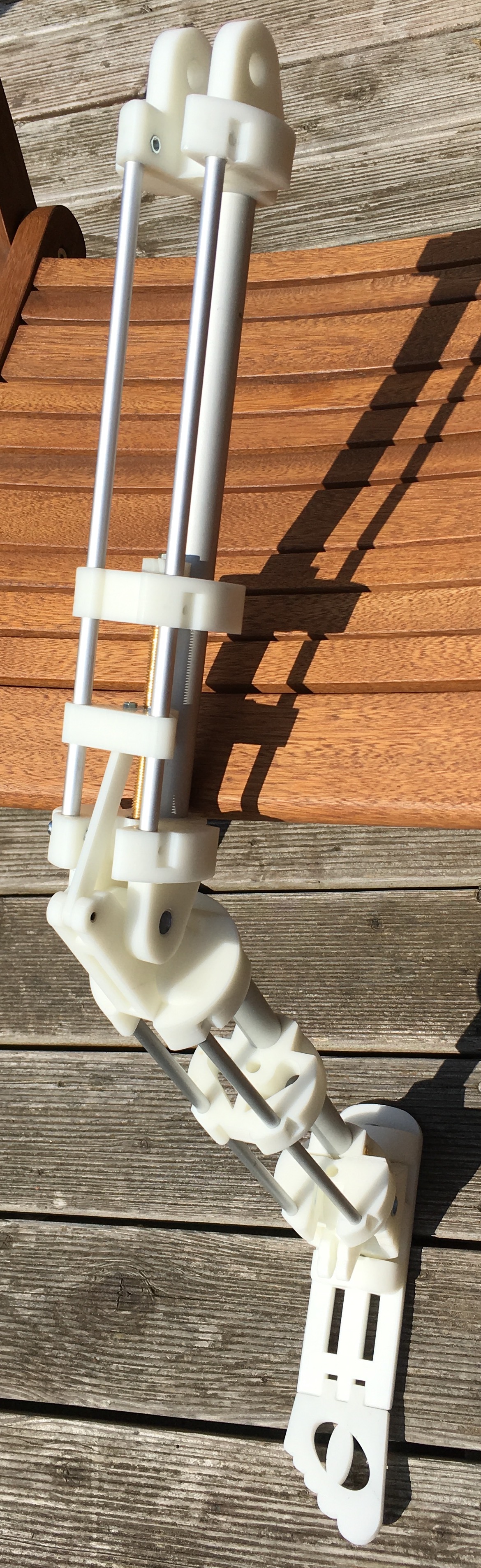
Hier sieht man das die Rohrführung nicht mehr in einer Linie ist
das ist dem neuen Motor mit Getriebe geschuldet


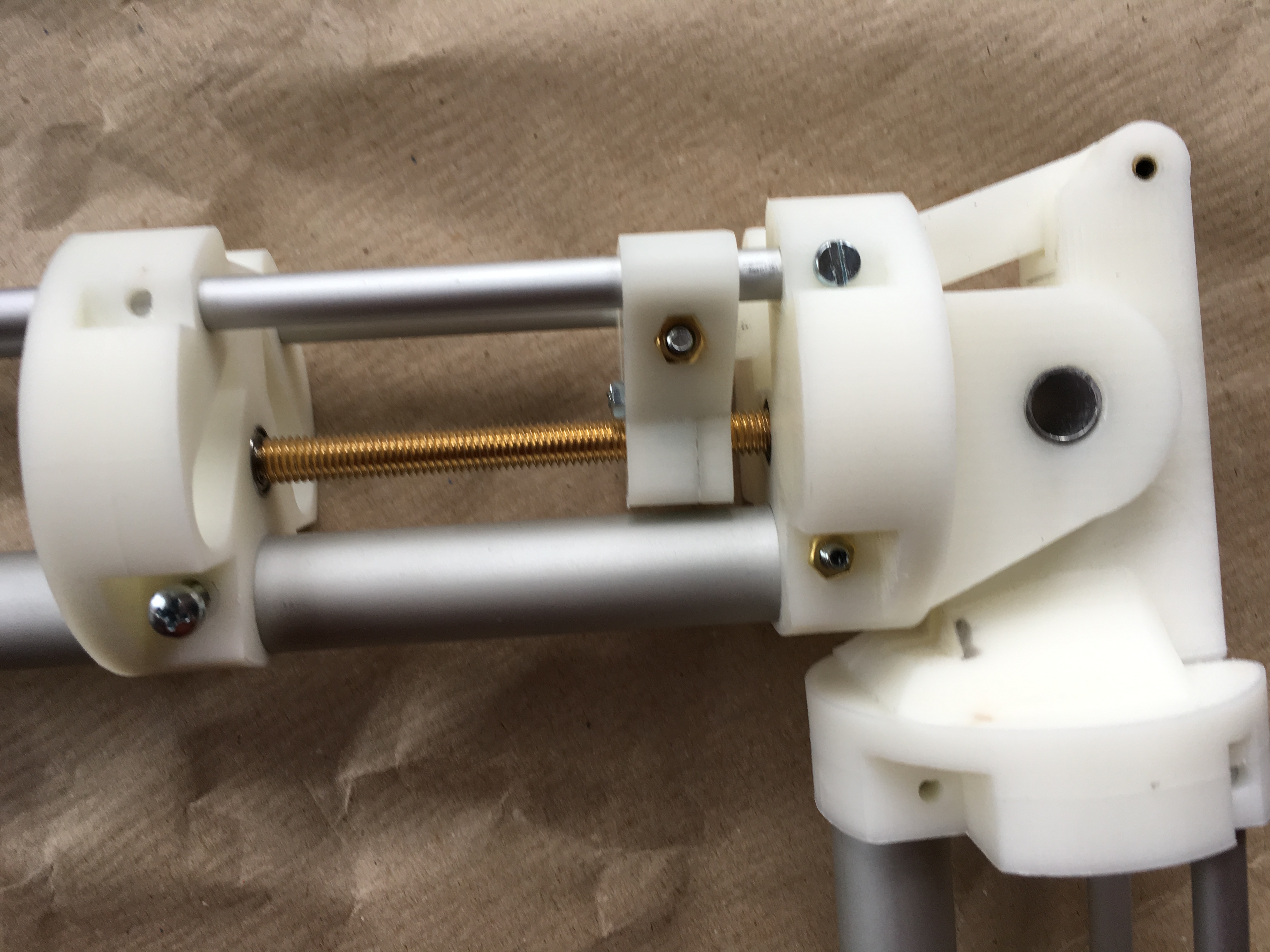
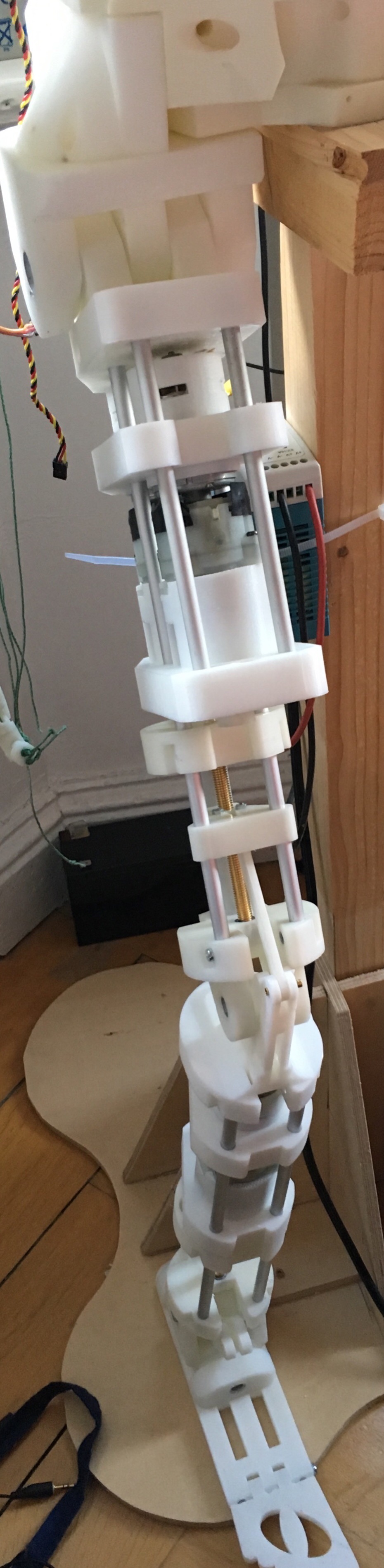
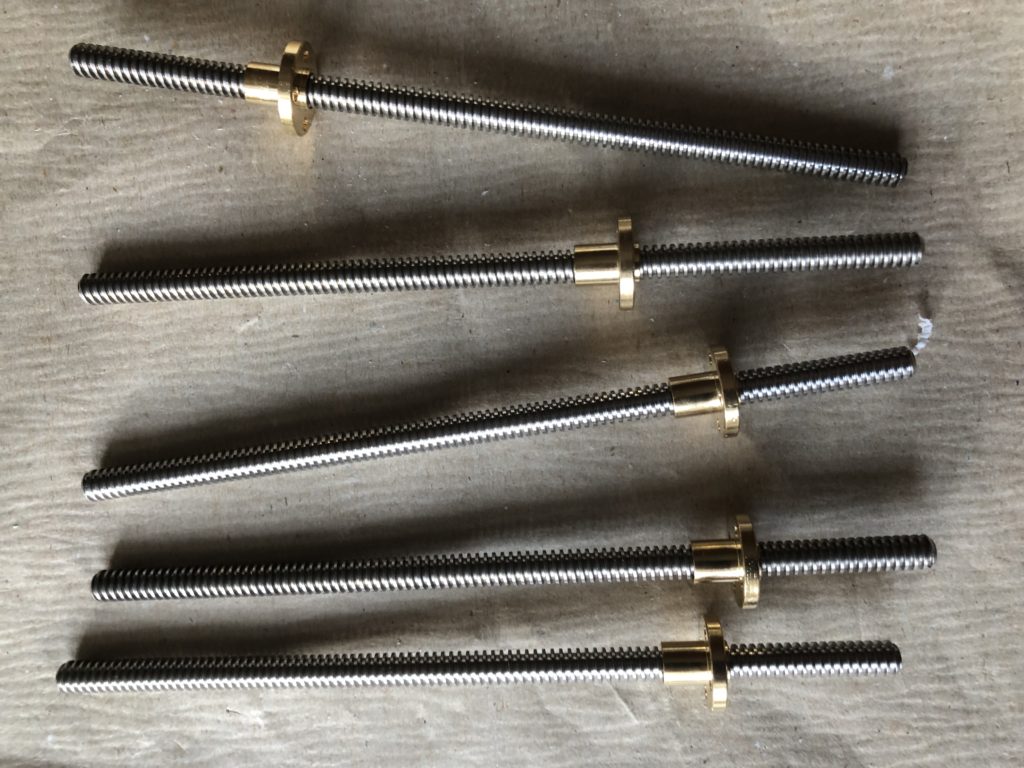
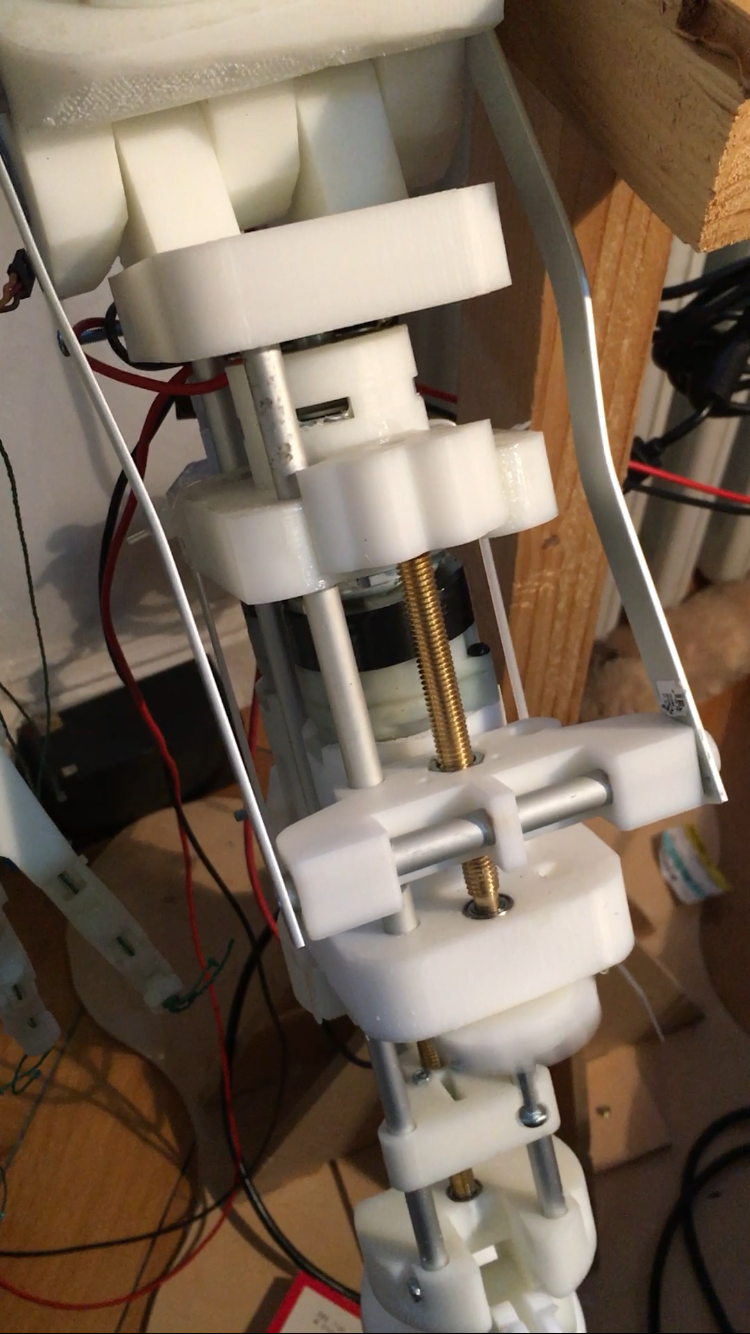
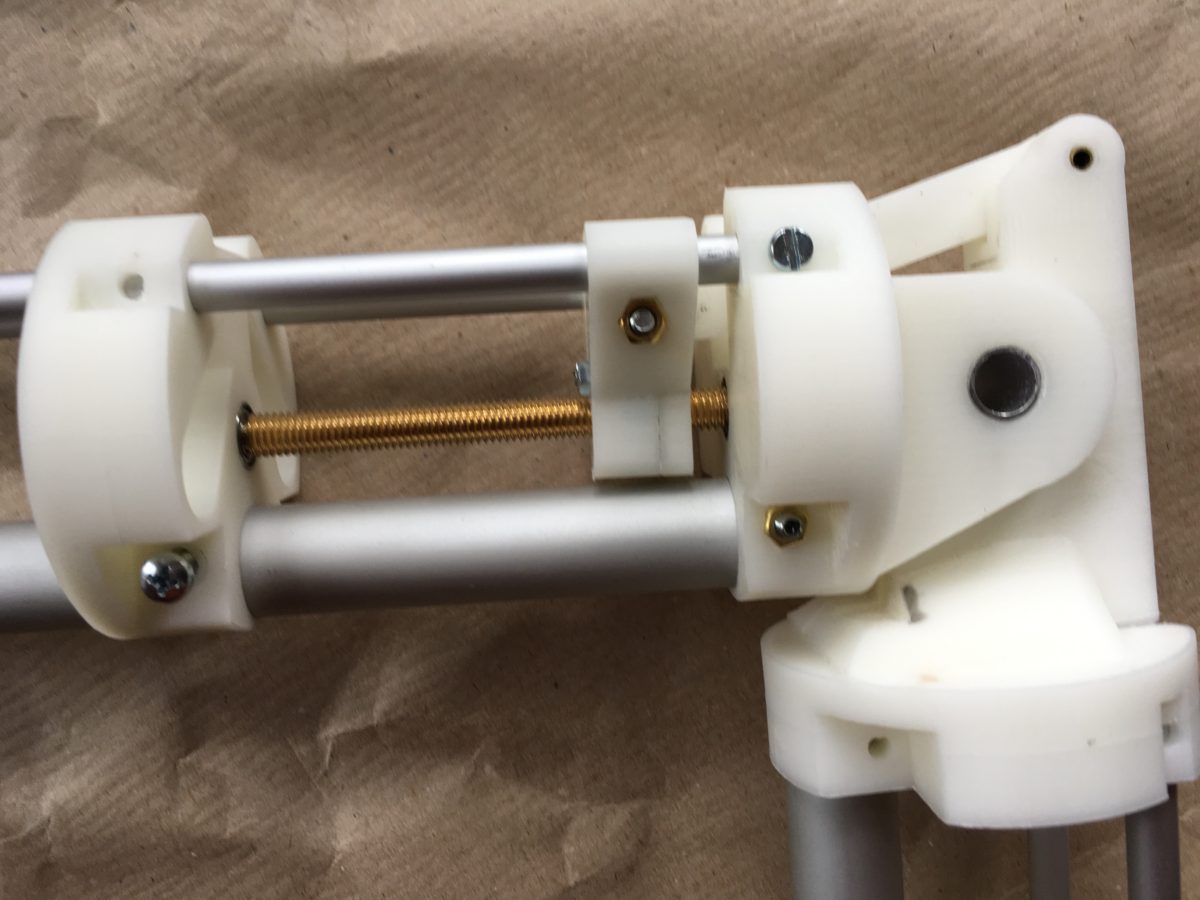
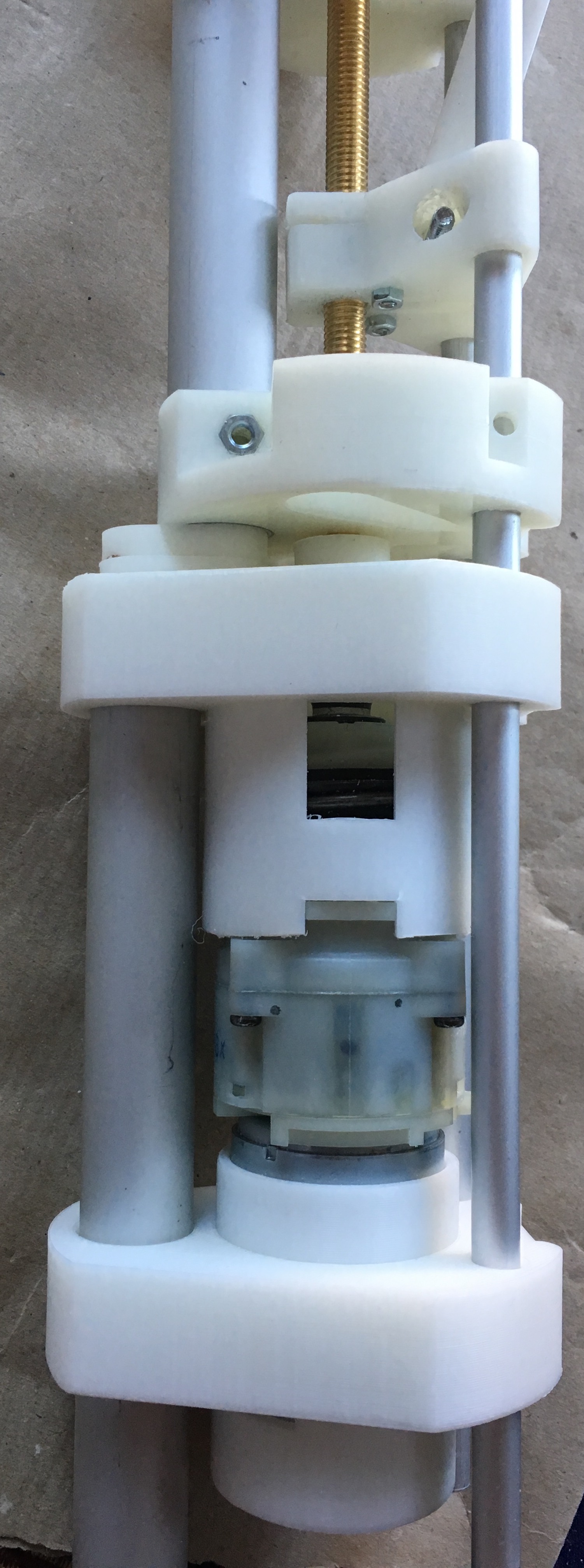
Hier sieht man in dem mittleren Bild die Gewindstange, die die Bewegung des Knies übernehmen soll

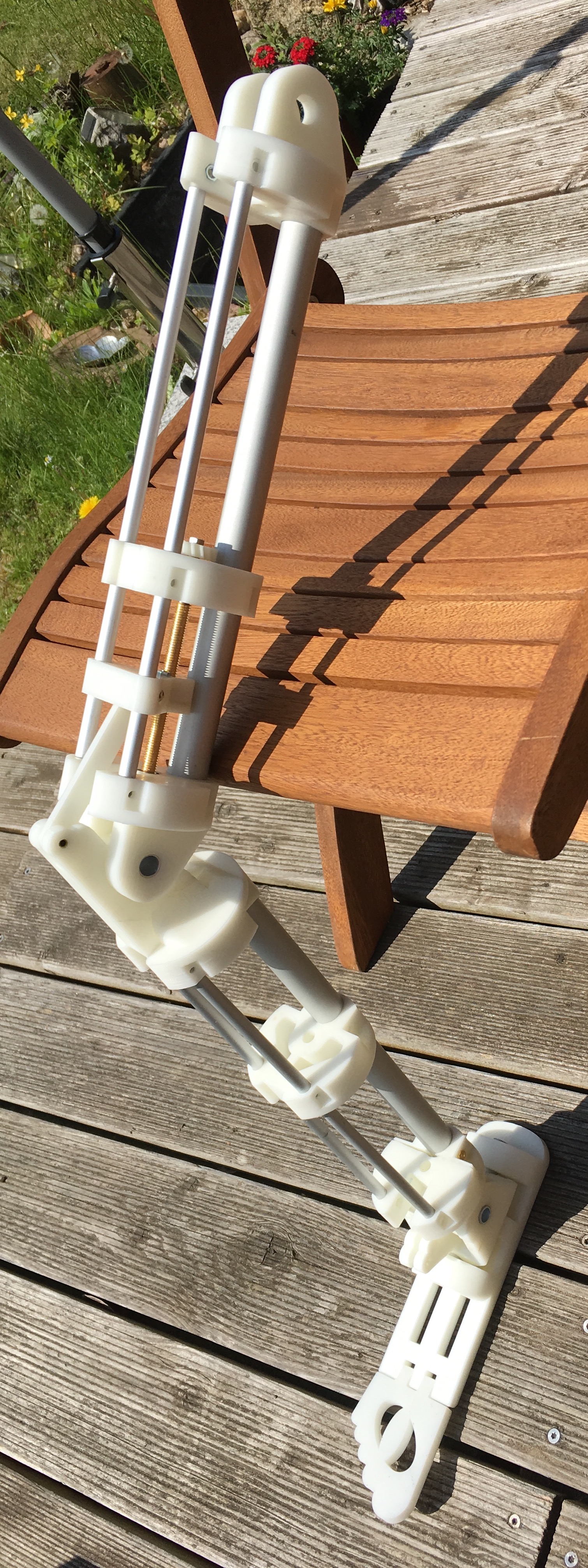
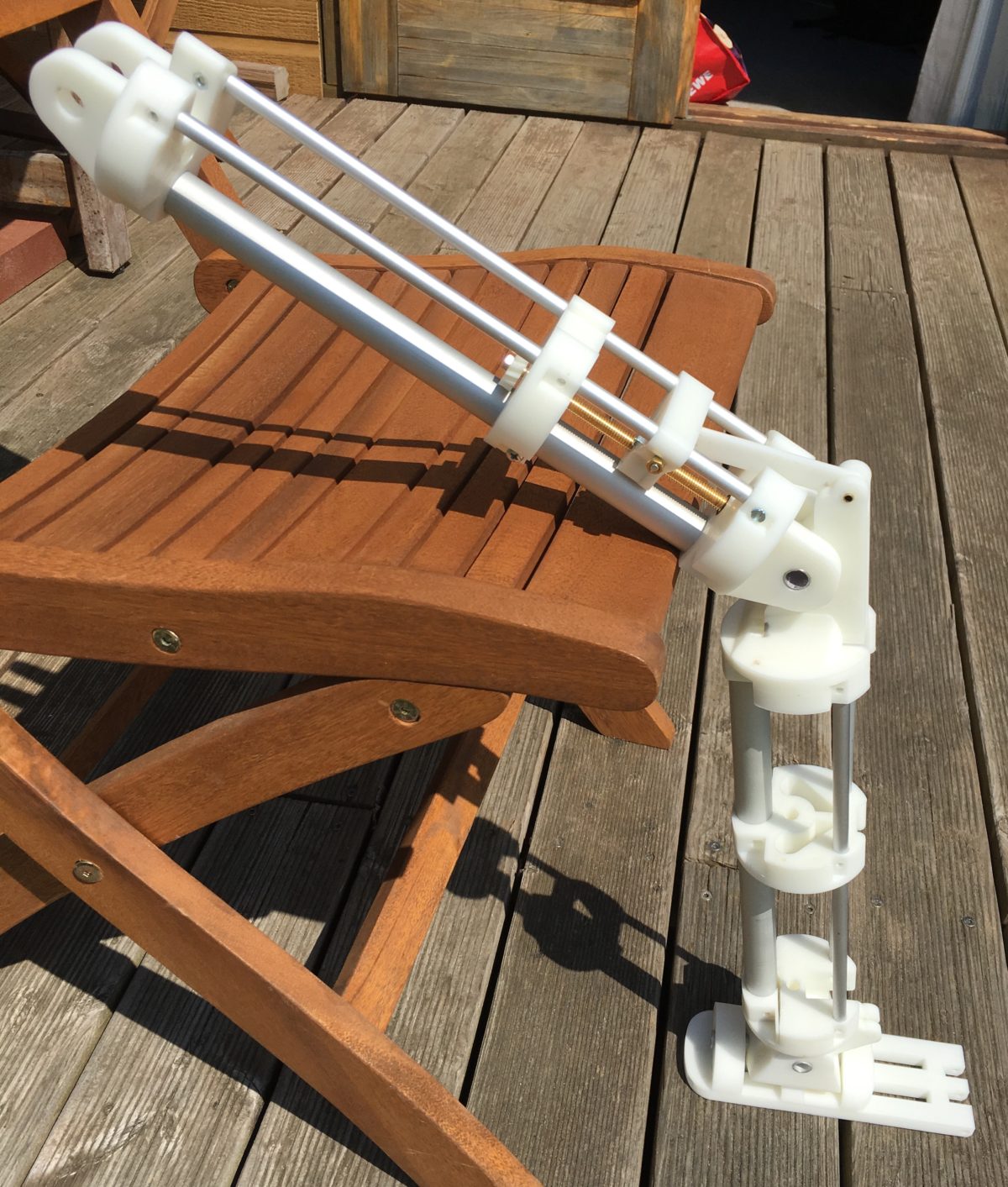
Bei schönem Wetter kann sich mal auch so ein Bein ausruhen !



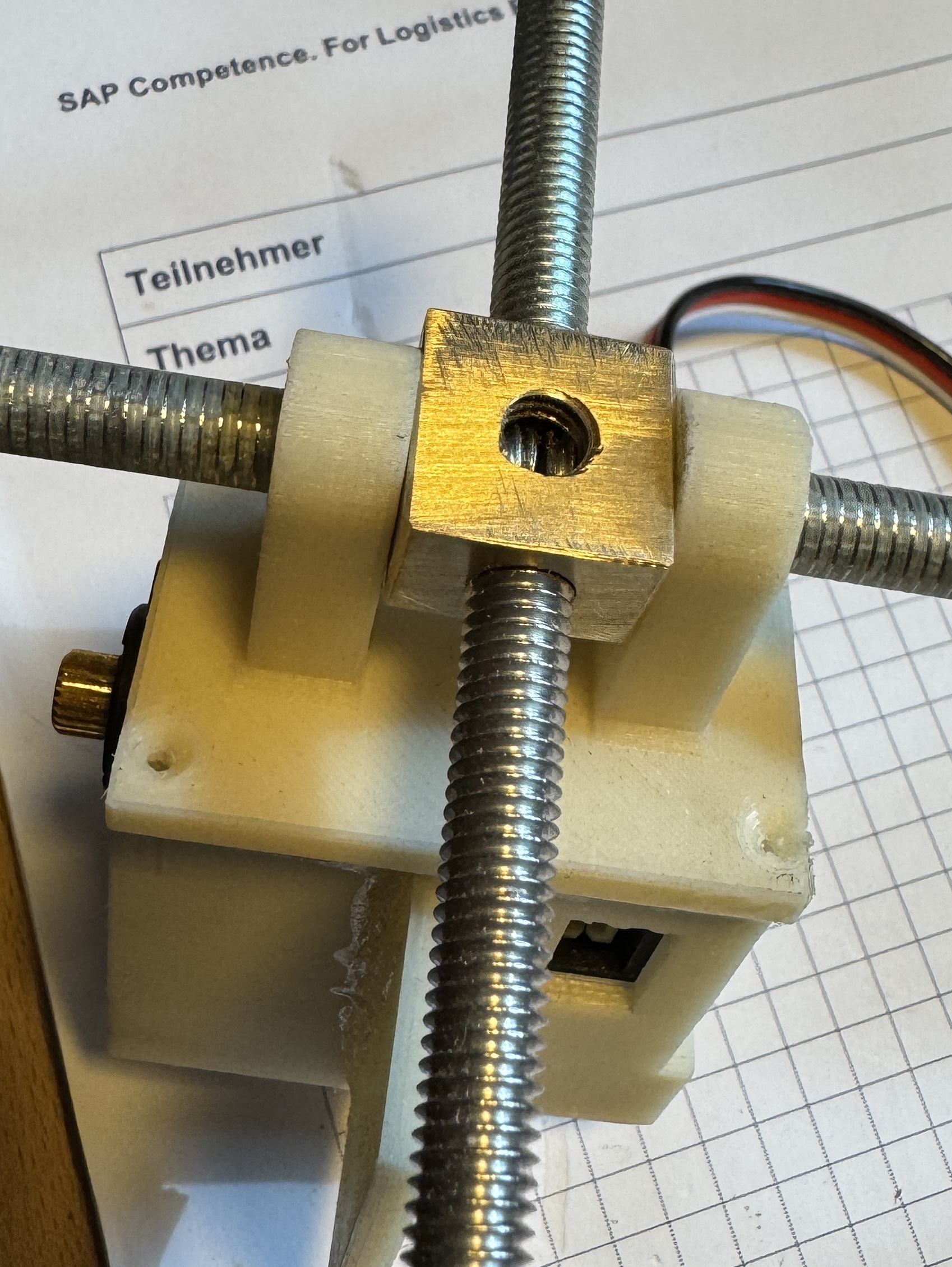
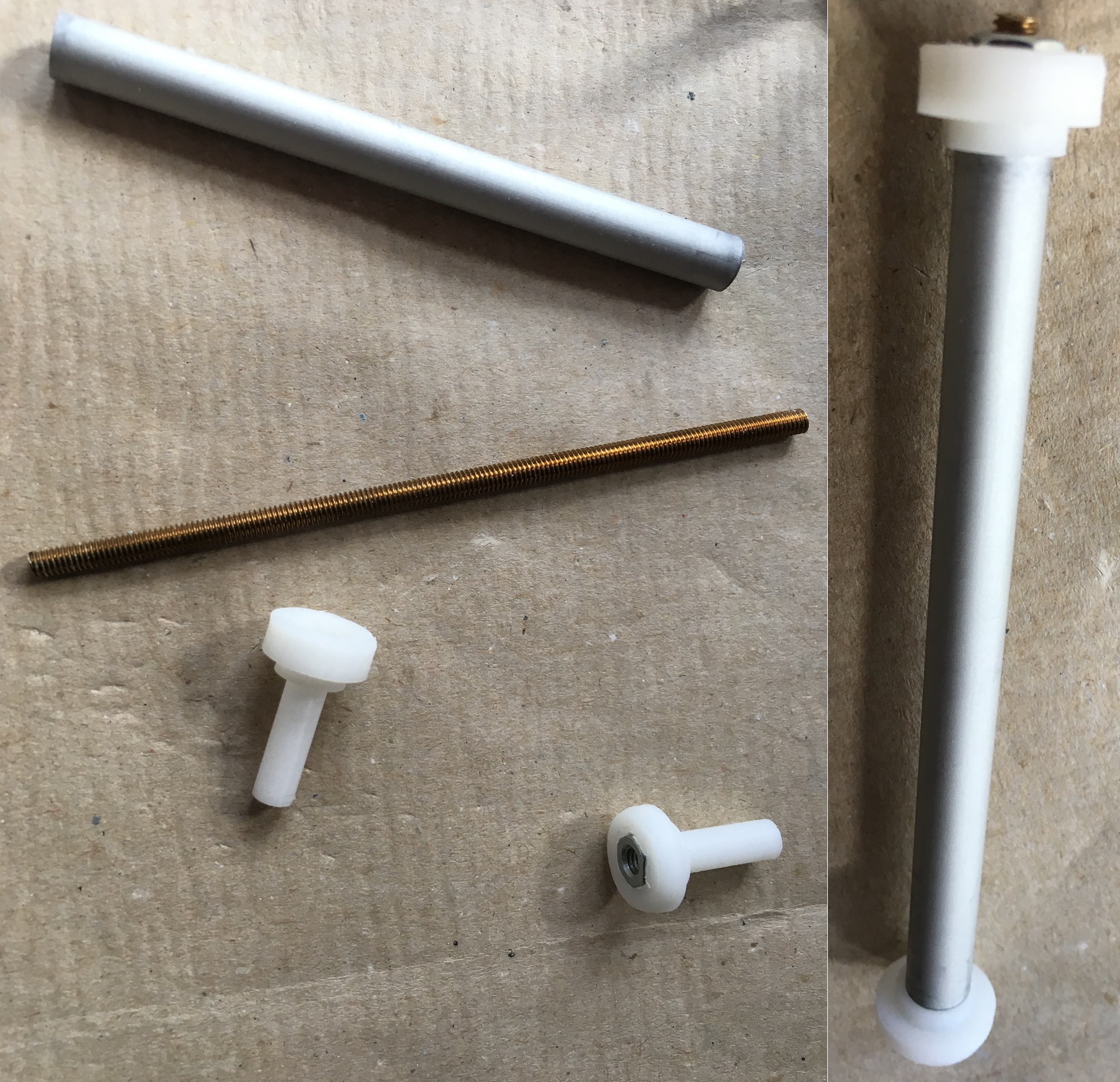
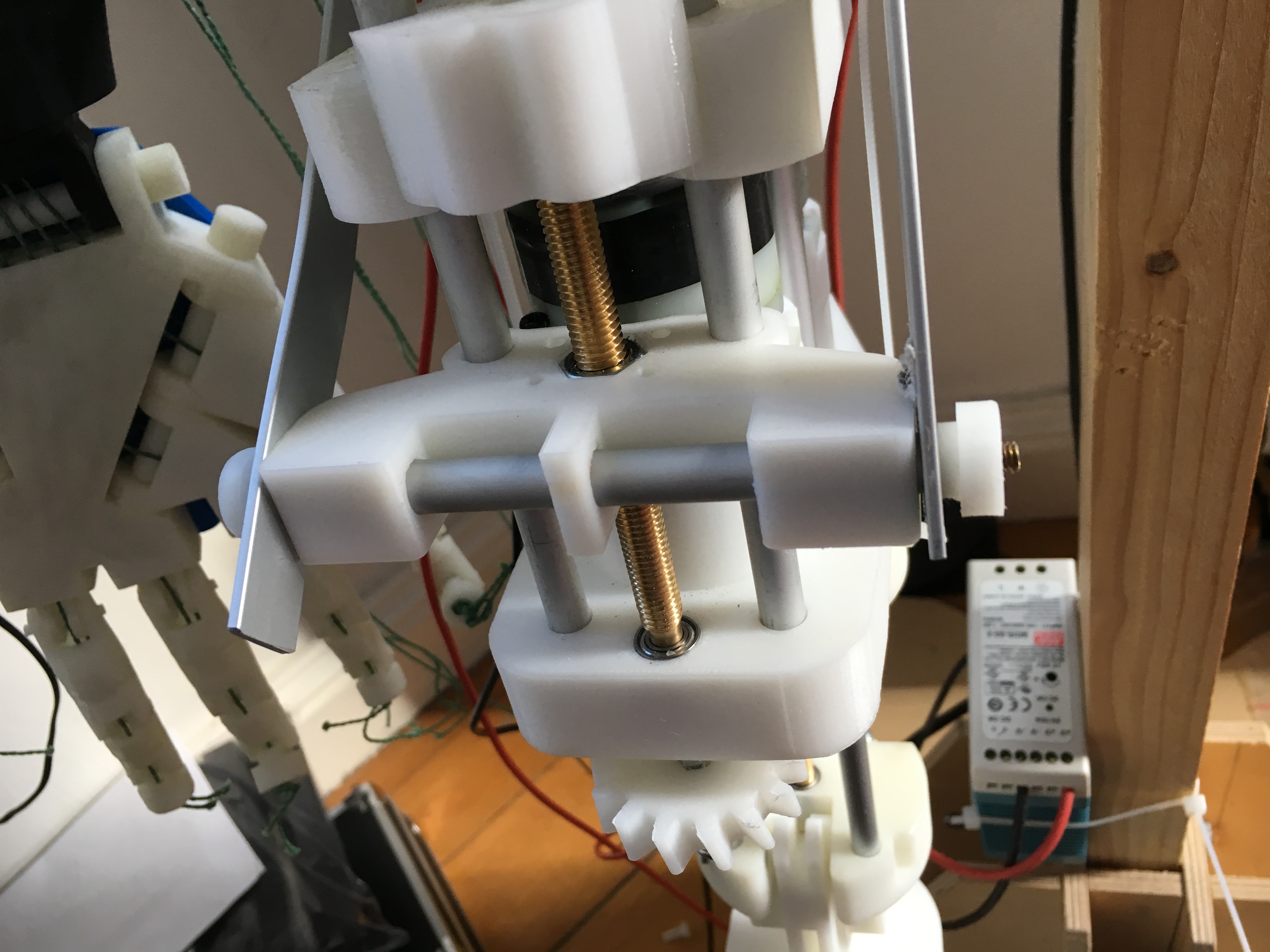
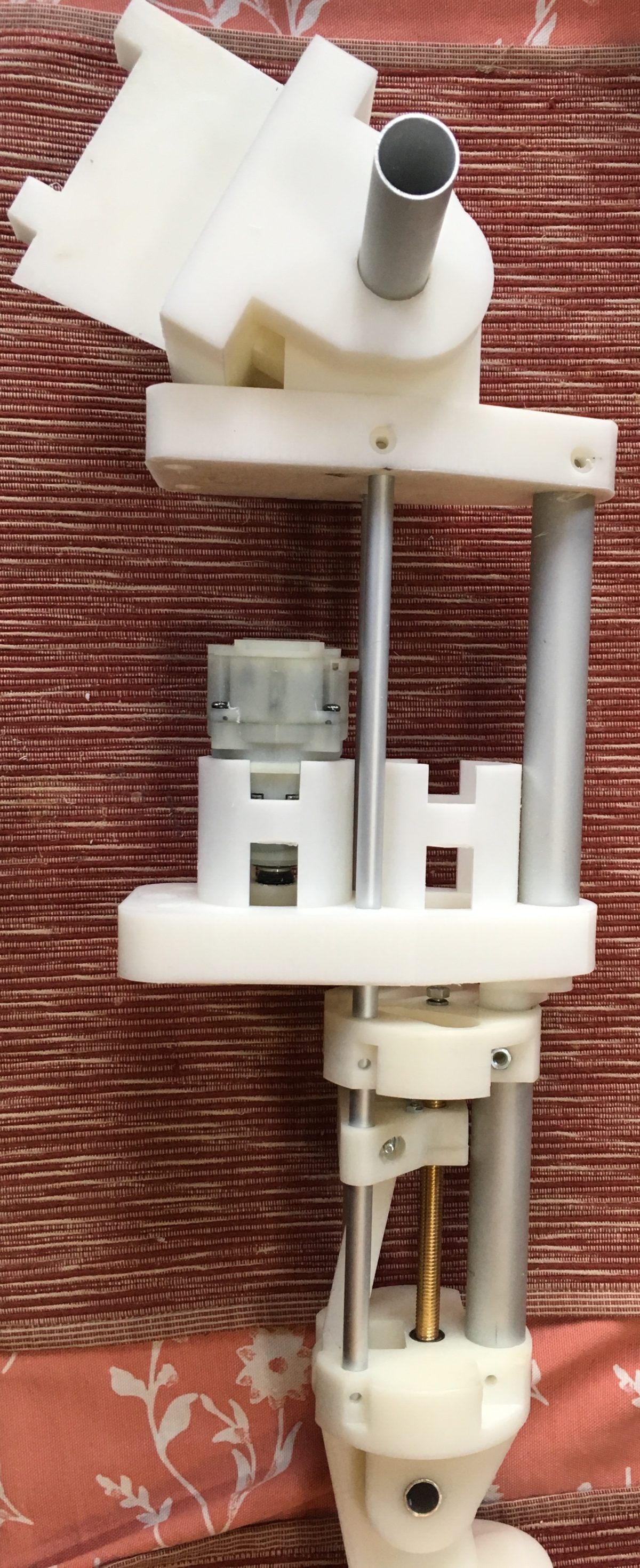
Ich habe die Gewindestange für den Aktuator der Kniebewegung auf einer Drehbank abgedreht
damit die Kugellager passen.
Das Zahnrad für den Antrieb wird mit einer M4 Schraube an dem von mir an der Stirnseite der Gewindestange
eingelassenen Sacklock mit Innengewinde befestigt.

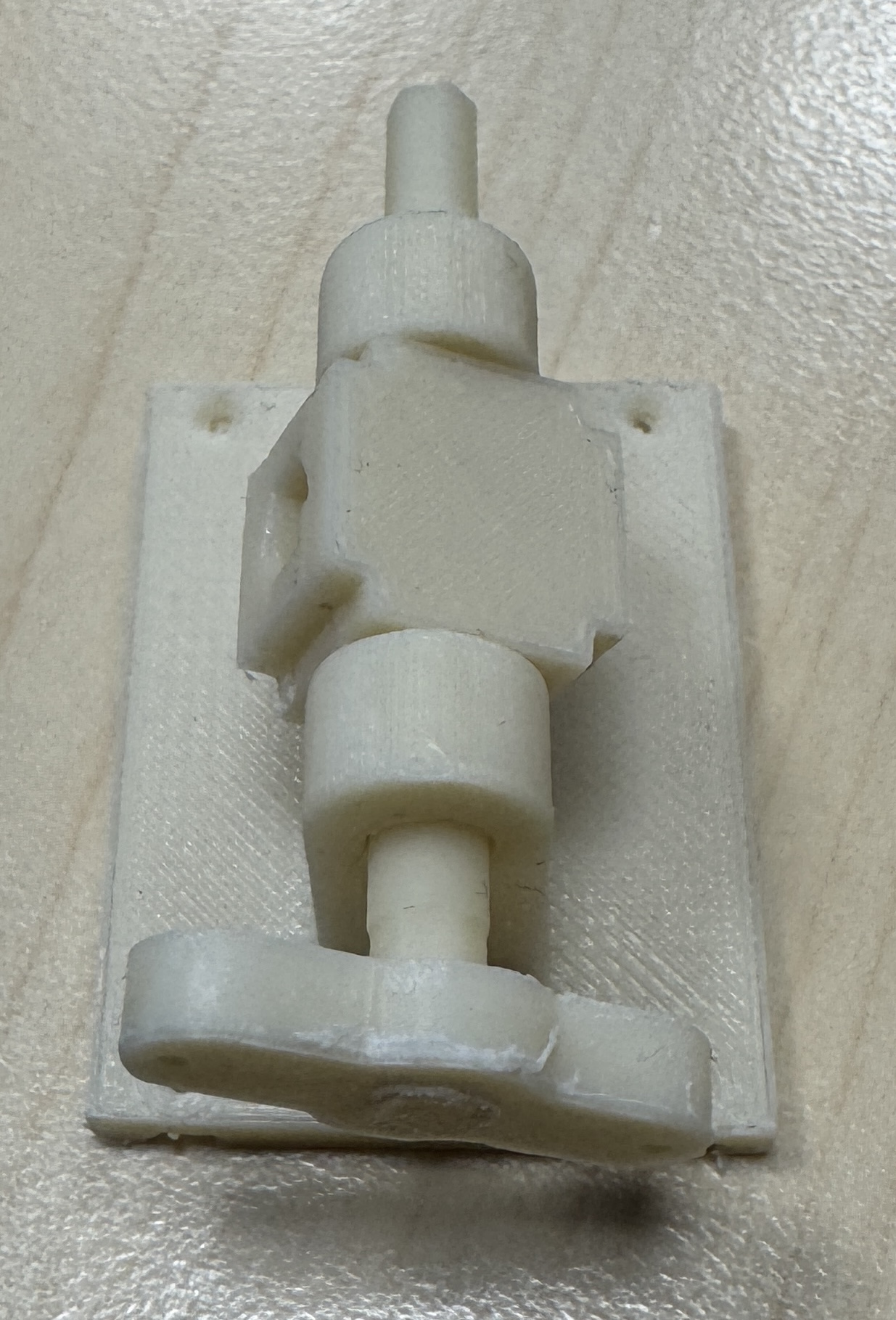
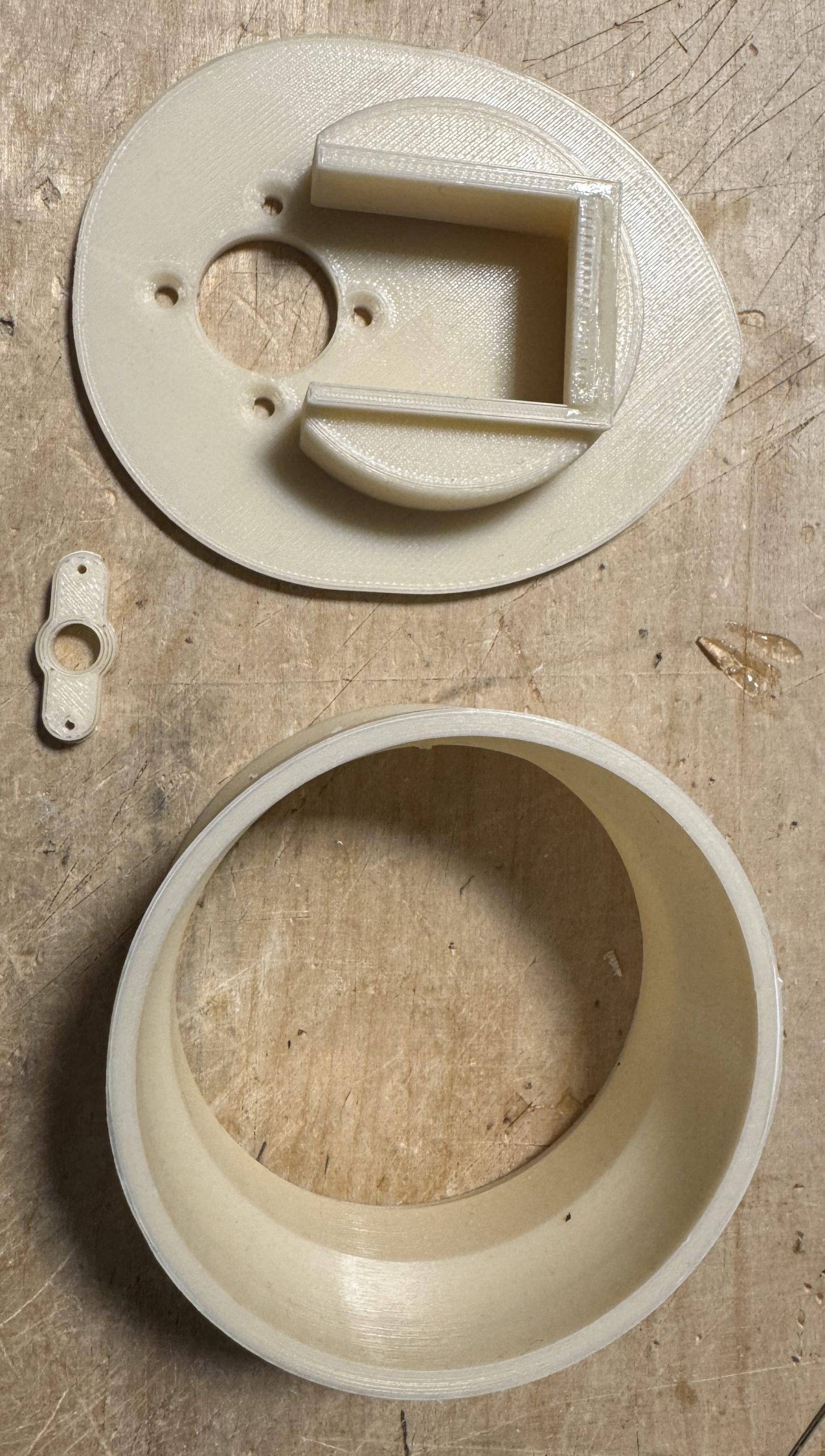
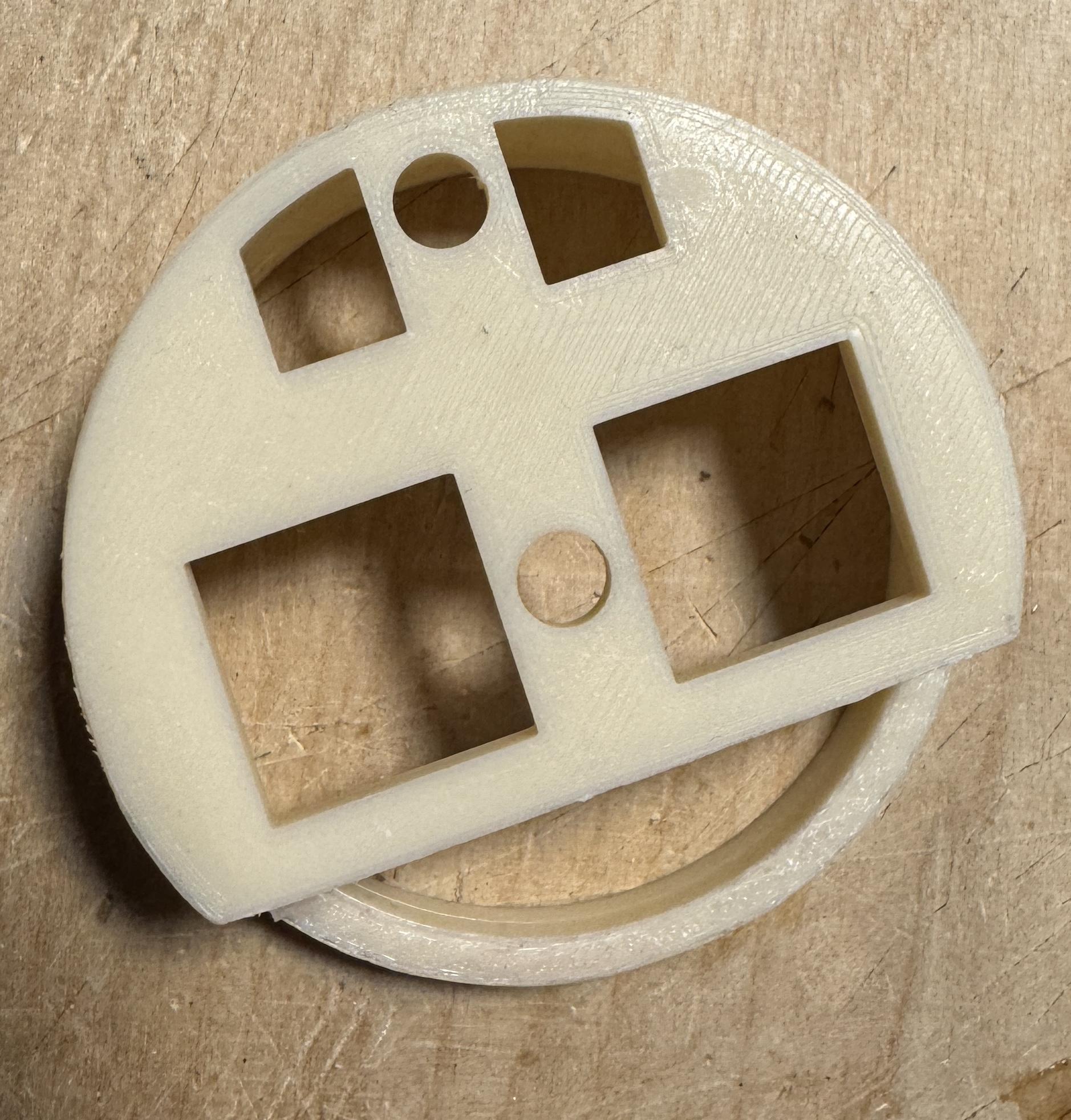
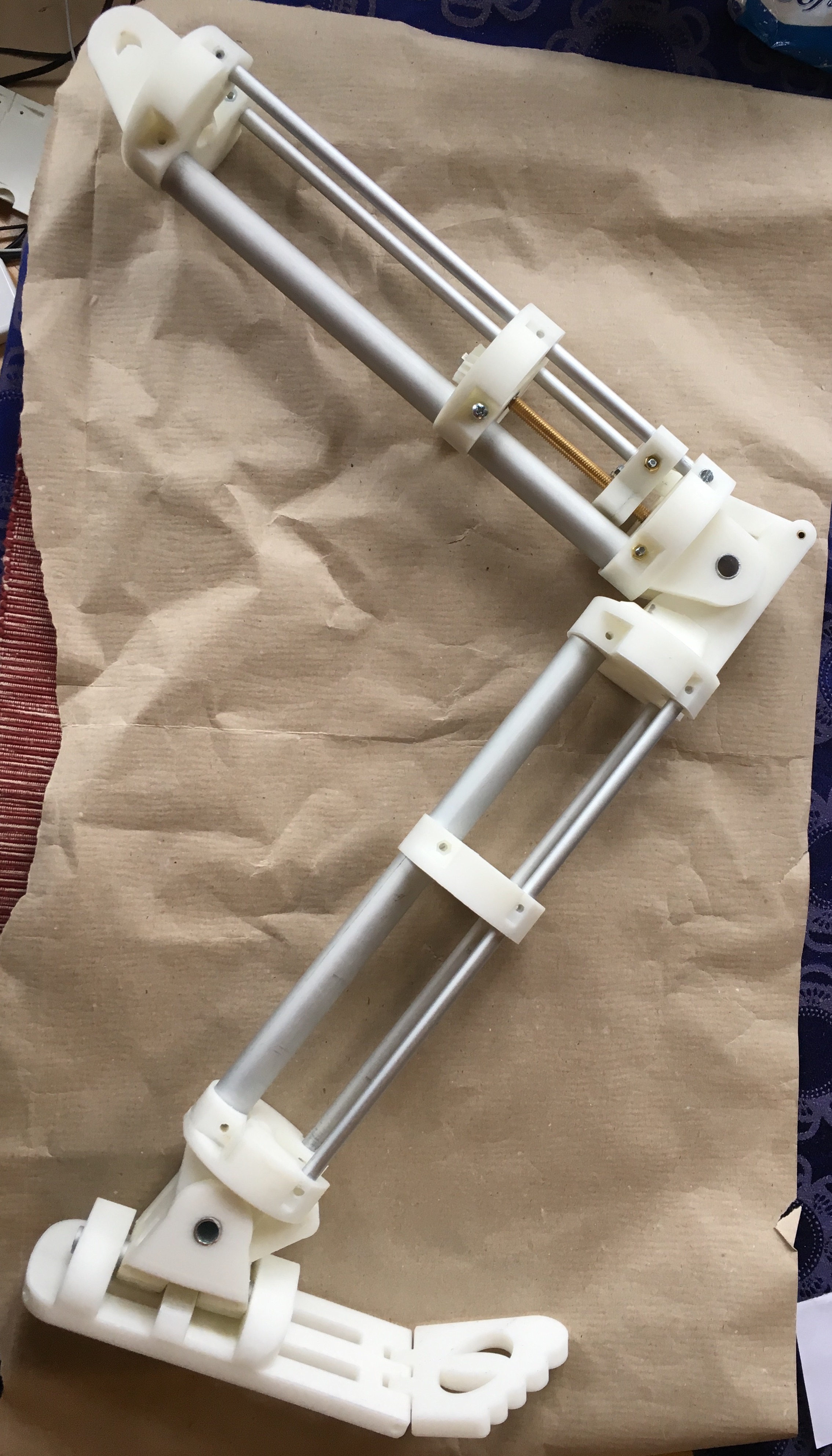
Das sind die Fotos der gedruckten Dateien

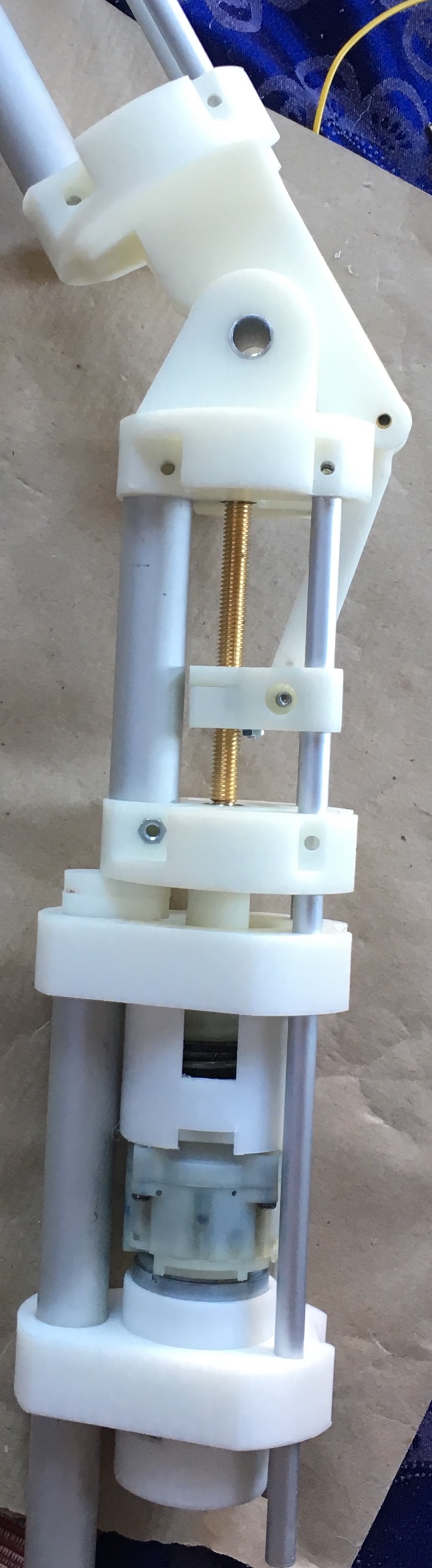
Das ist das Teil was mittels einer Gewindestange das Knie bewegt


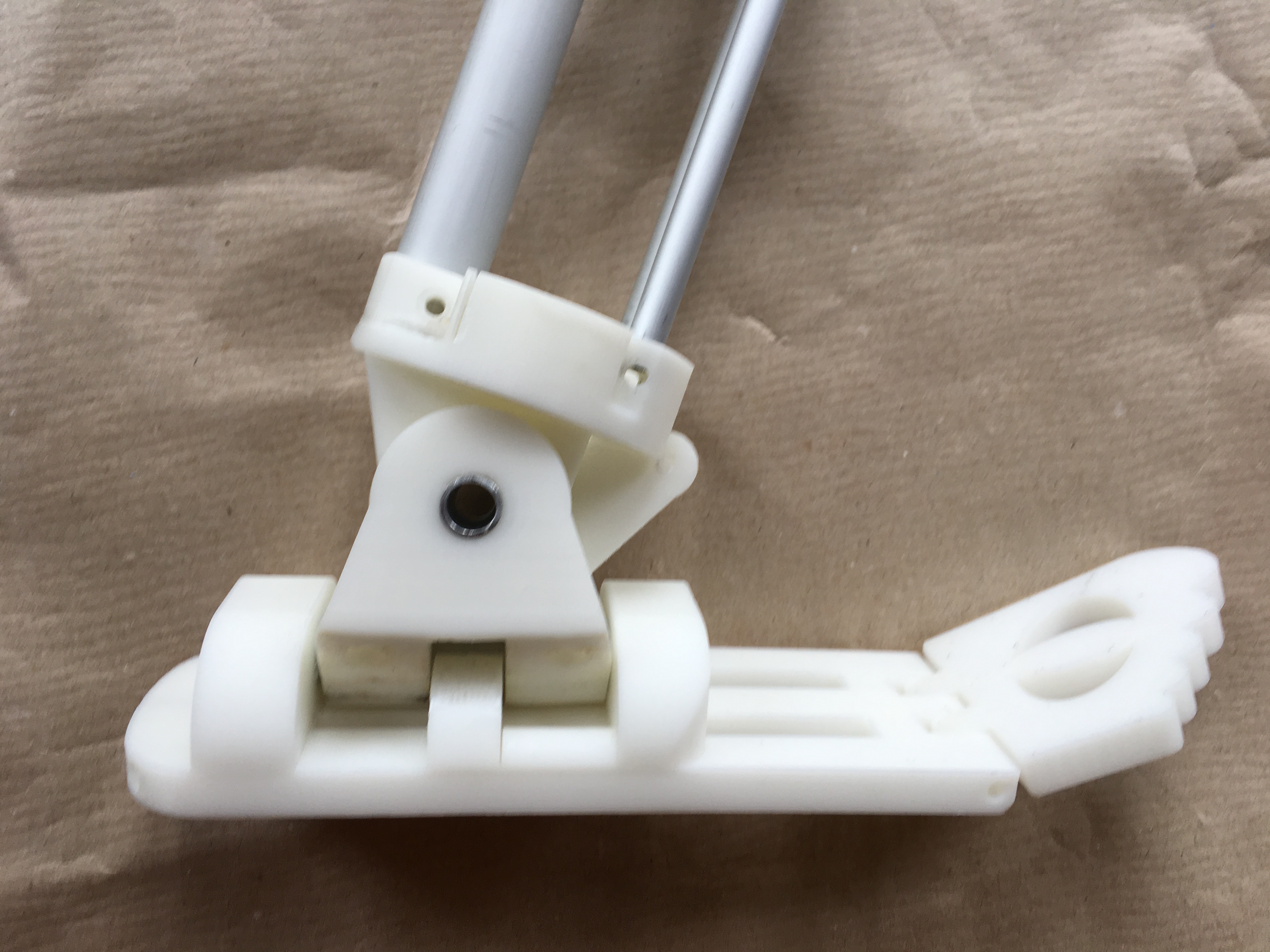
Das ist das Kniegelenk


Die Rohre zur Führung sind 8mm Alu und als Knochen 20mm Alurohr


So sieht das im STL Viewer aus

Ein 5v 10A HutschienenNetzteil welches über den +Adj
auf 6V gepimpt worden ist.
Dient als Ersatz für den Akku beim experimentieren.
Der ist immer am Ende gewesen wenn die Softwareentwicklung
in Ihre spannende Phase getreten ist.

Der Blick auf die eingebauten Raspis und der Arduino Mega mit seinem Halter.

Von oben

von hinten der Touchscreen
Der dazu dient das WLAN Passwort in fremden
Netzen einzugeben
Hier mal der Anschluss für das Ethernetkabel

Das Ethernet geht auf einen 5-Fach
Switch der mit Raspi 3 und Raspi 2 verbunden ist.

Hier die Kabel mit Beschriftung




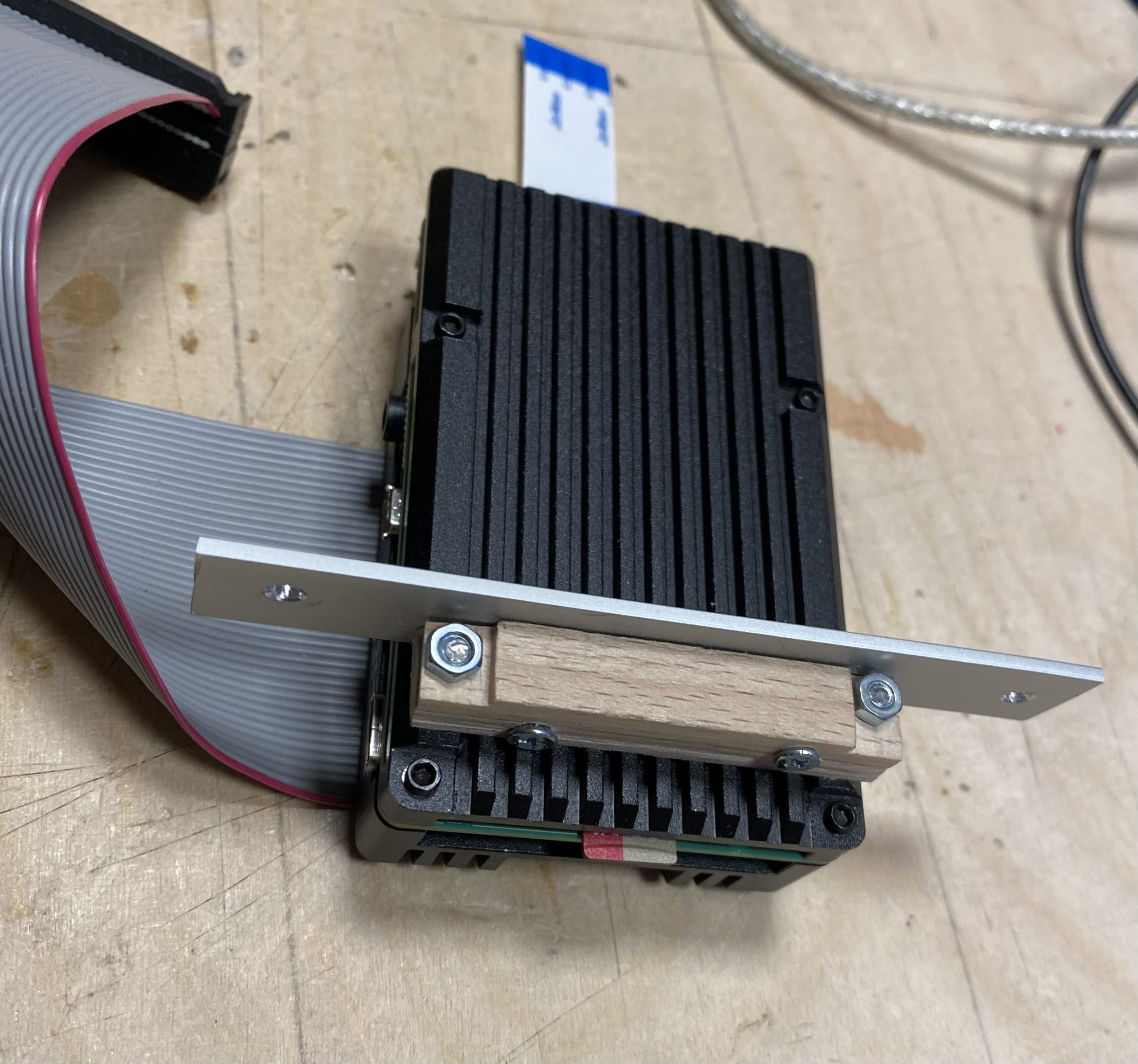
Ich habe mal nen Halter für das Raspi’sandwich entworfen. Am Rand ist der Halter für die Soundkarte

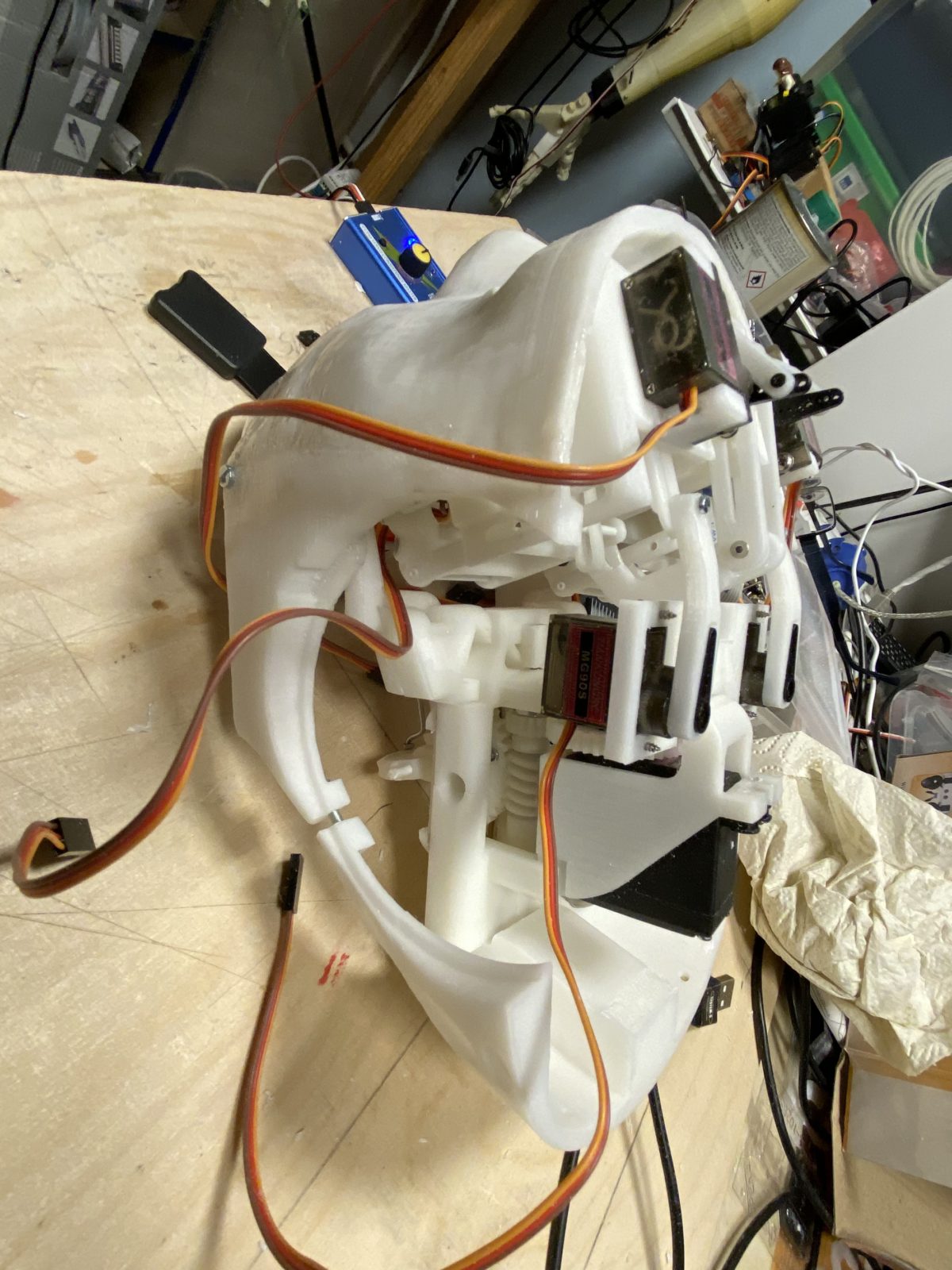
Links ist noch kein Servo im Arm.
Rechts sind alle Servos vorhanden aber nur einzeln ansteuerbar.

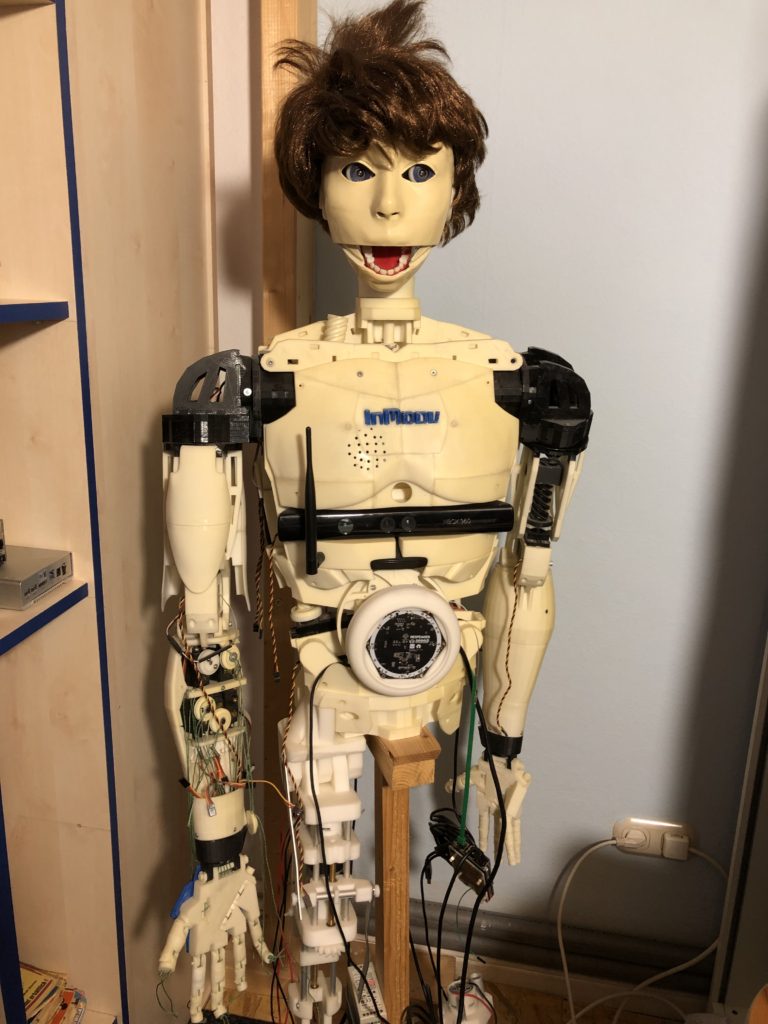
Dieser Selbstgebaute Ständer für den InMoov
wackelt nicht mehr !!!


Die beiden Raspberry Pi’s oben RP 3 unten RP 2 b.
Sie werden über einen Switch per Ethernet verbunden
Auf dem RP3 soll myrobotlab laufen (kybrain) und auf dem
RP 2 (kymouth) die Spracherkennung mit Jasper und Julius.

Und hier der Arduino Mega 2560 mit dem Nervoboard




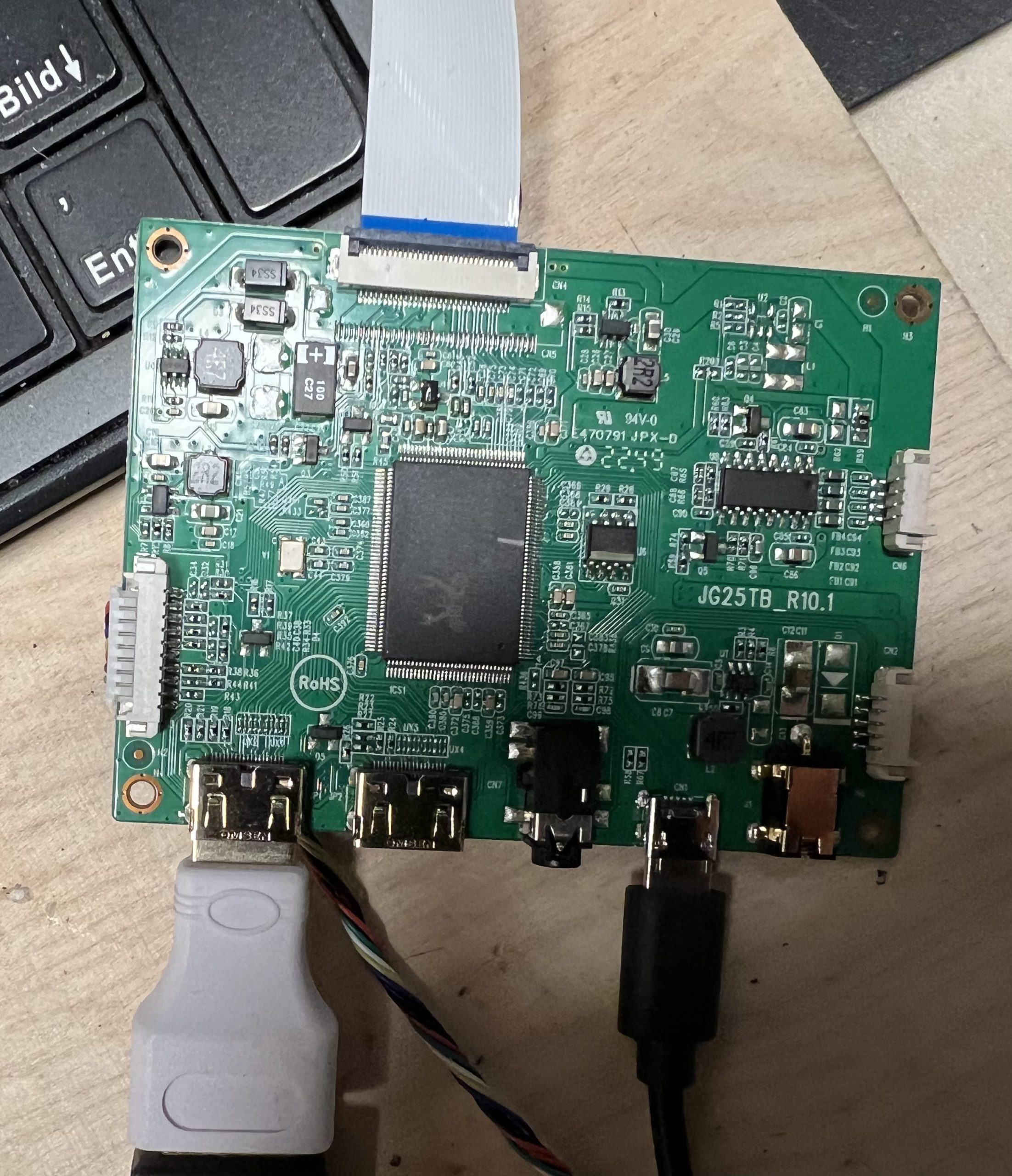
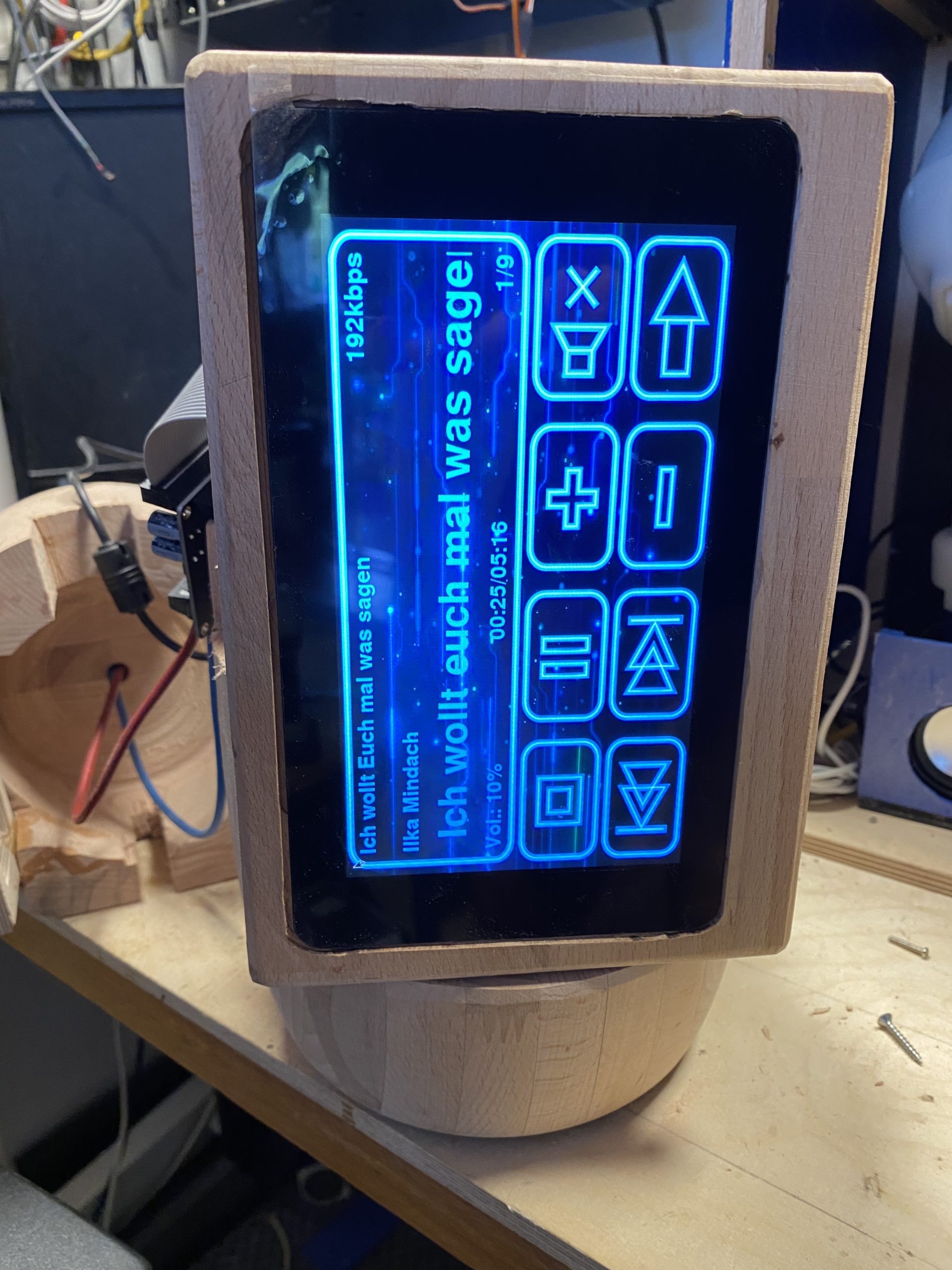
Da war die Batteriefachklappe nur halb fertig und das Ist der Tablett Ersatz mit einem 4″ Touchscreen


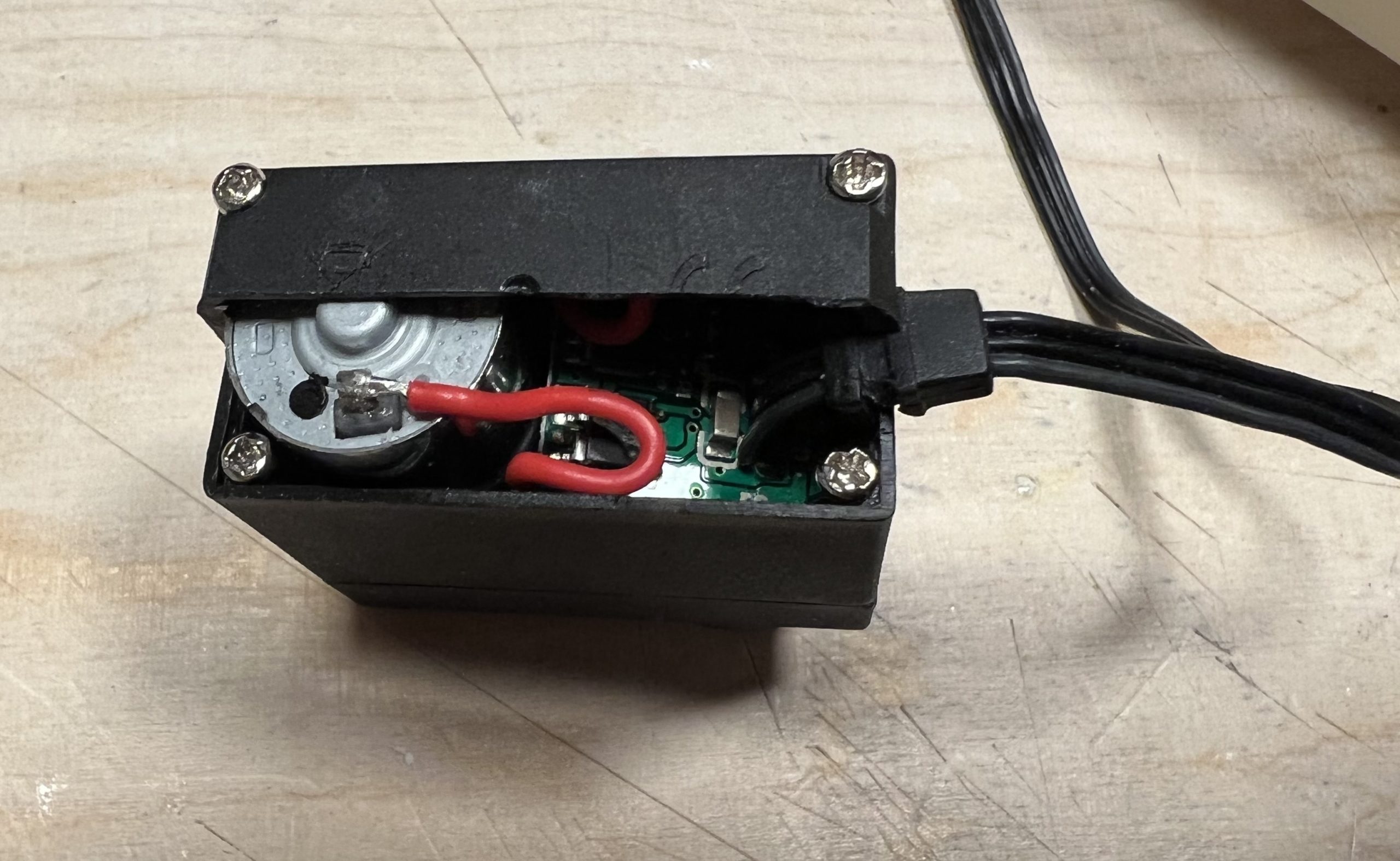
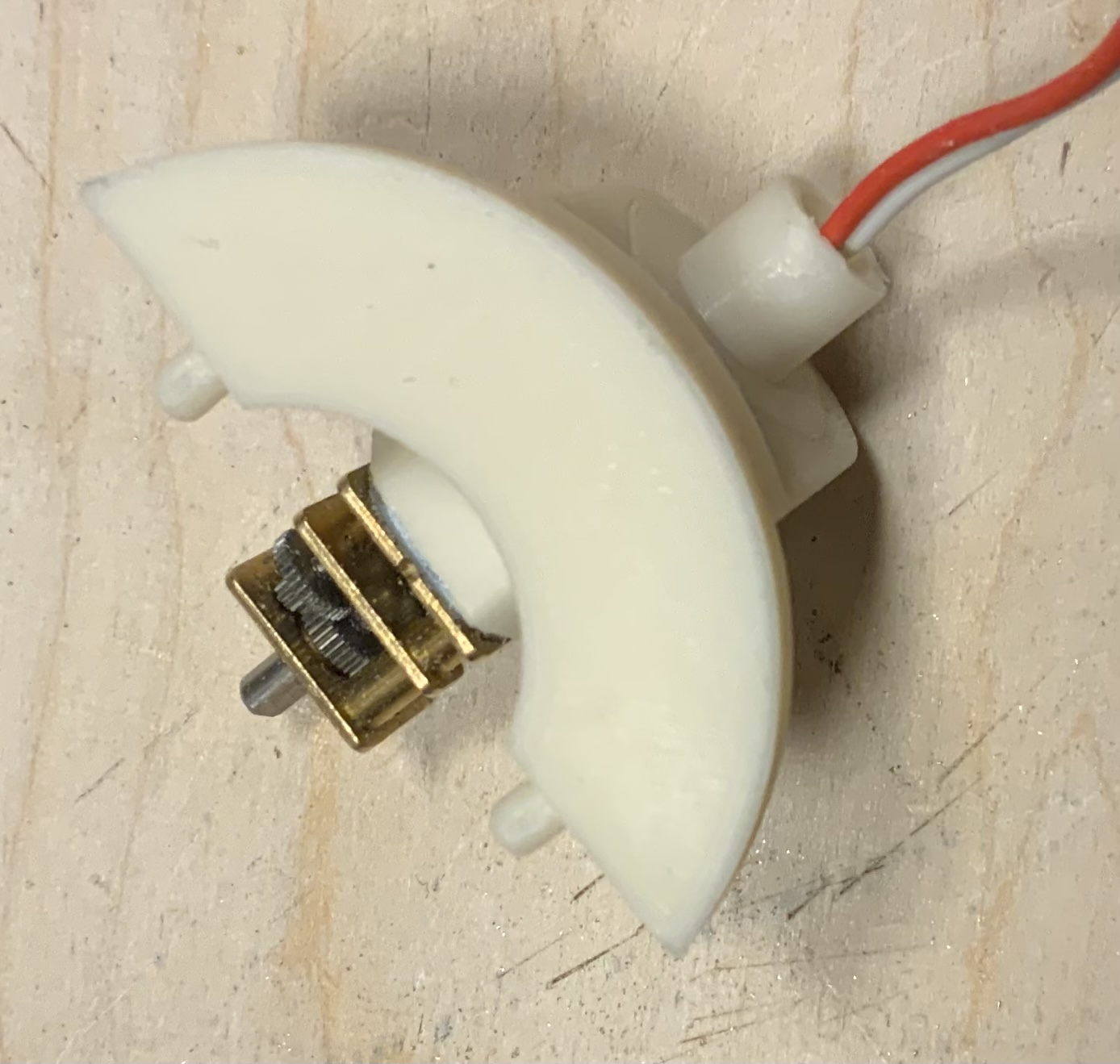
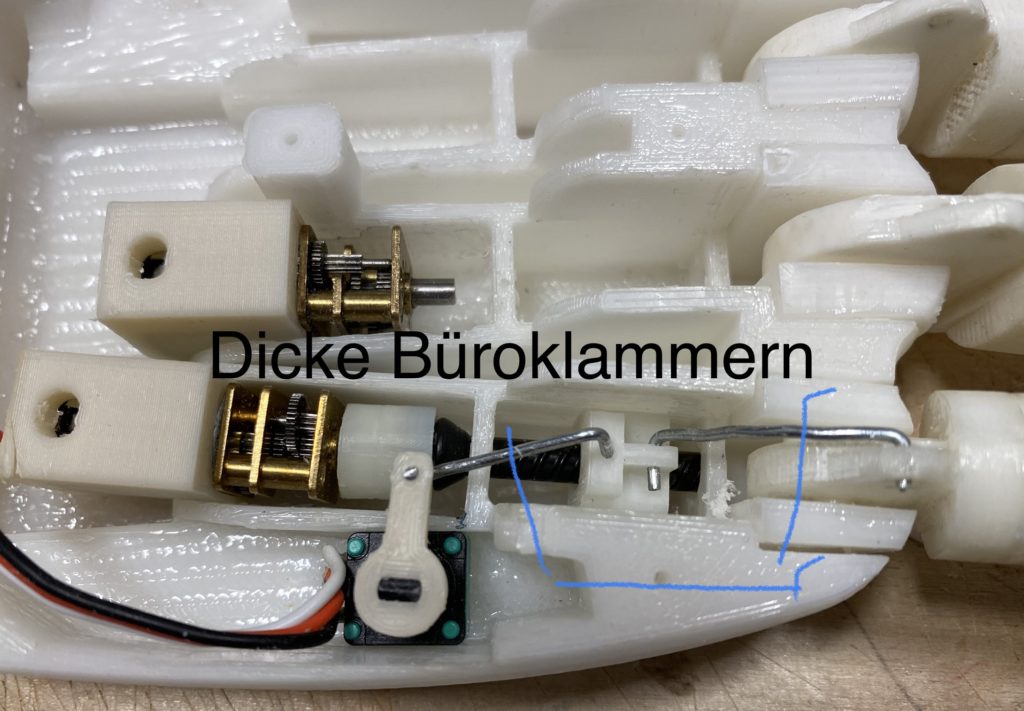
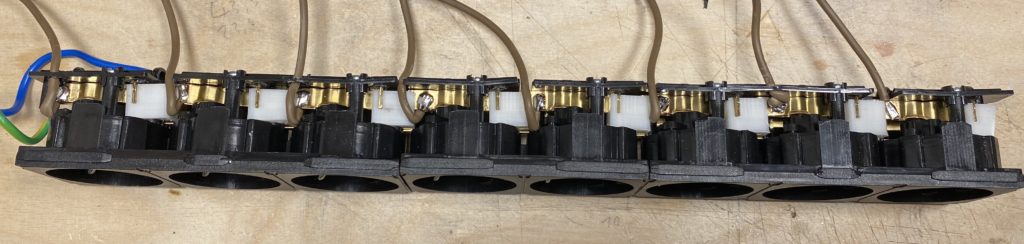
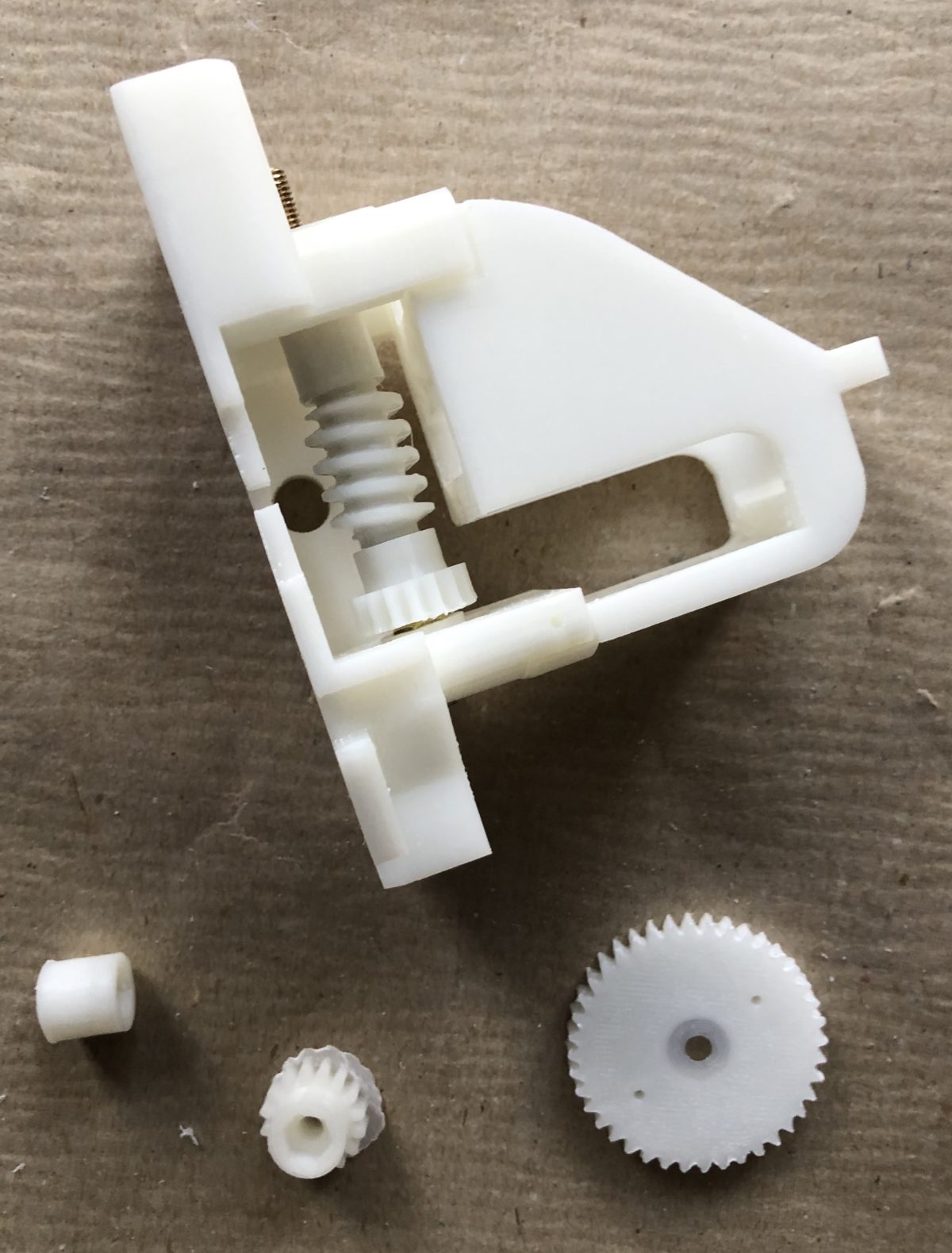
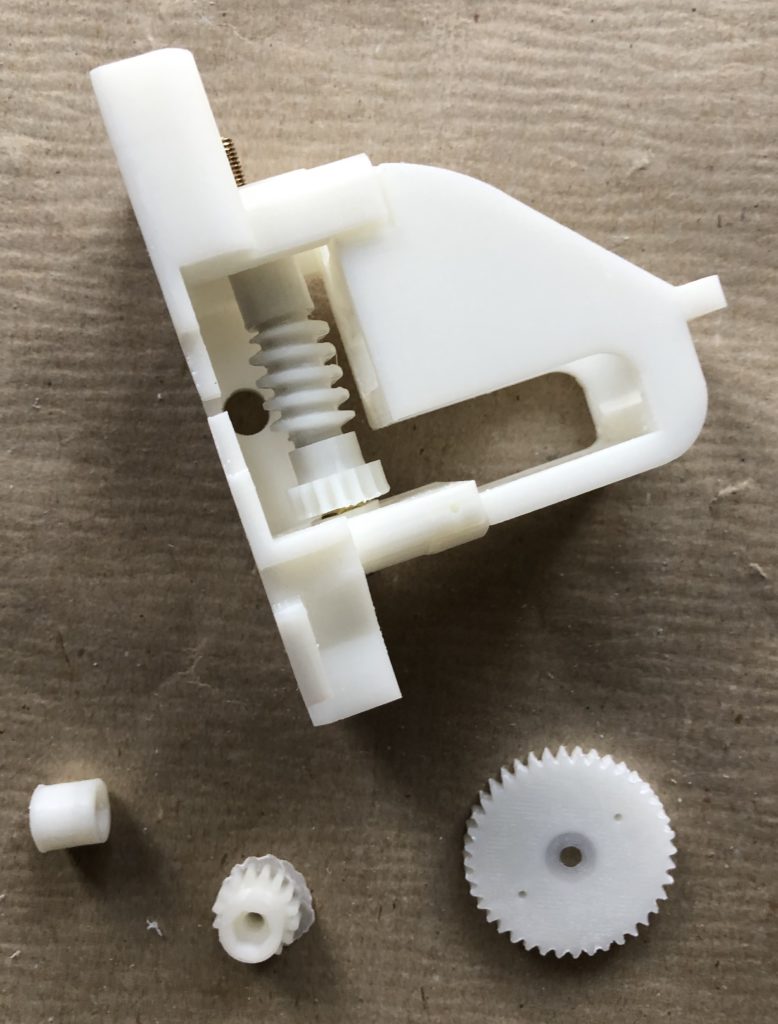
Der Klebestift und die bereits ausgebaute Schnecke


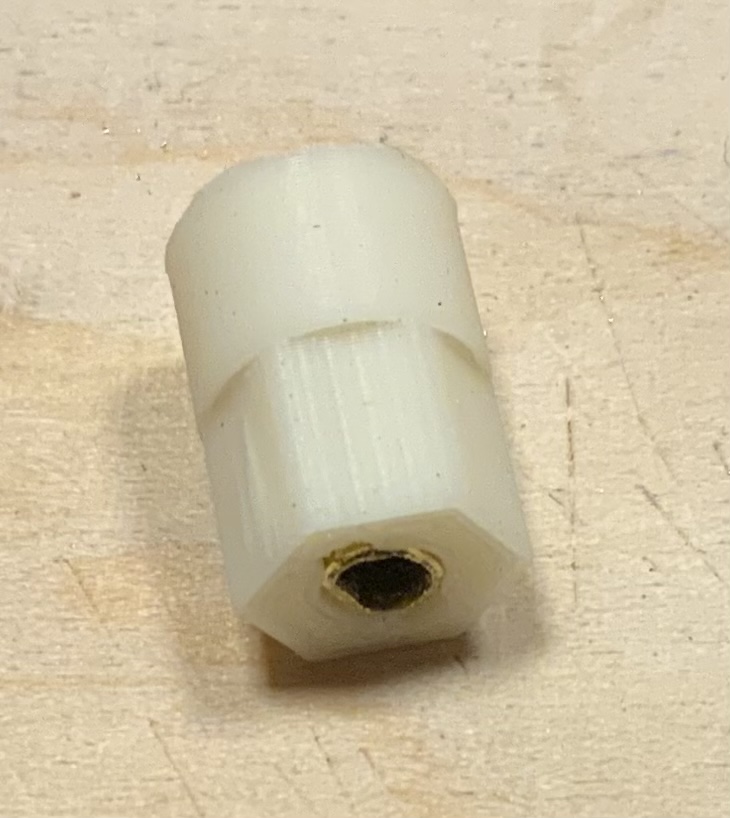
Der Motor mit Kupplung und das Servopoti was als Drehachse fungiert
Mit dem Inhalt eines Klebestiftes (Schnecke)


Wird der Finger gekrümmt

Das ganze ist eine Abänderung des http://www.thingiverse.com/thing:118031 von Gael Langevin
Es soll noch ein Motor angeflanscht werden


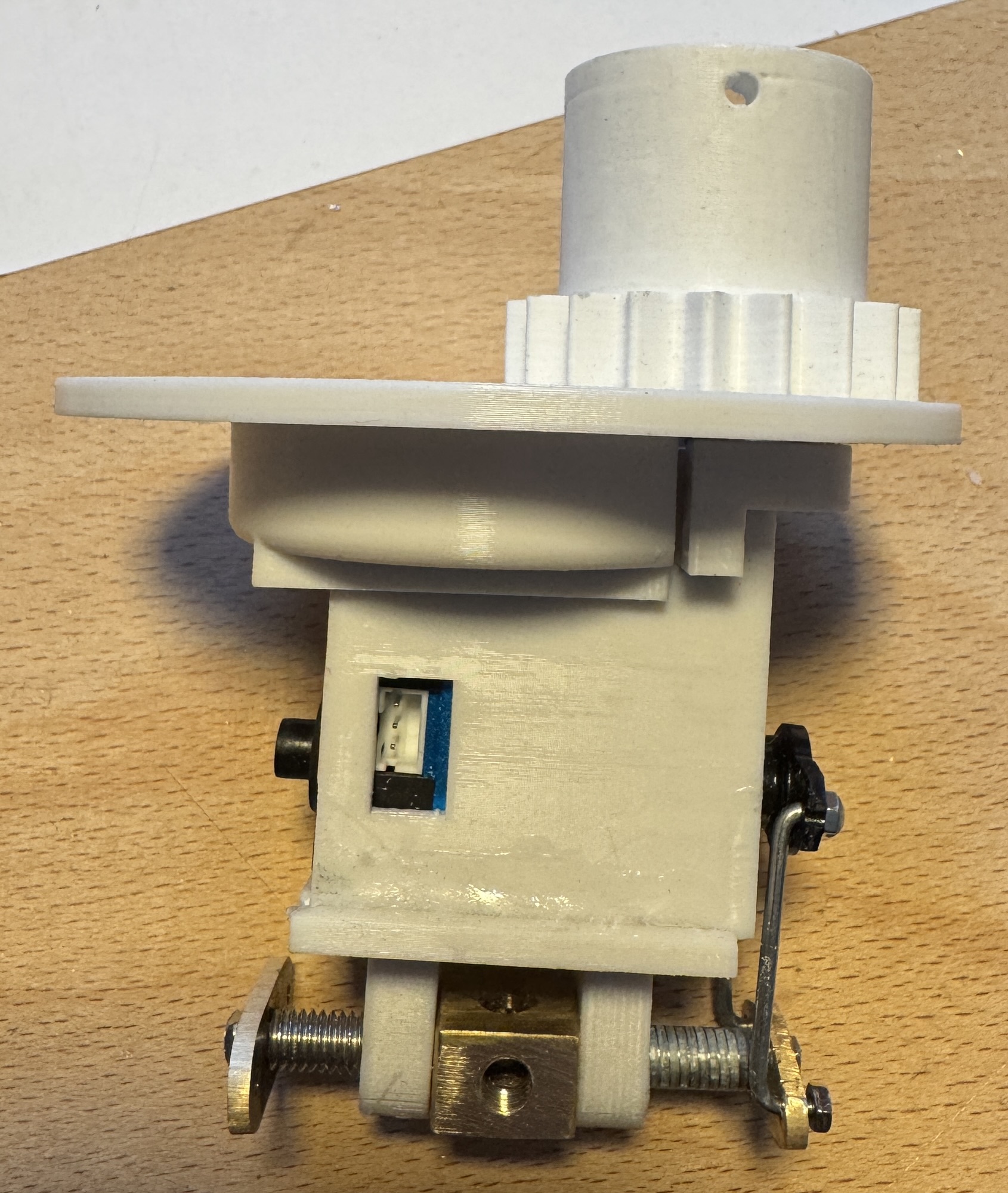
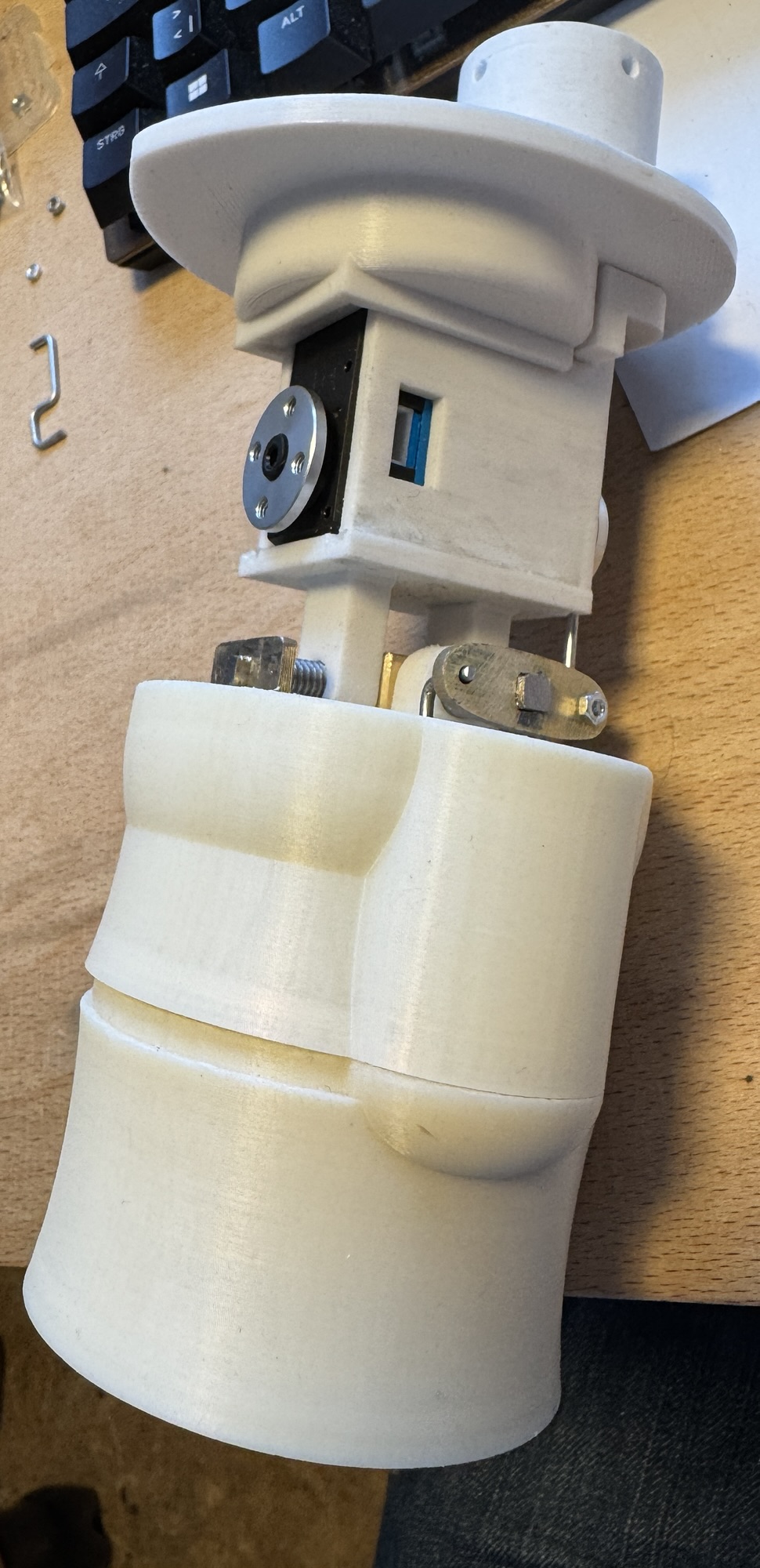
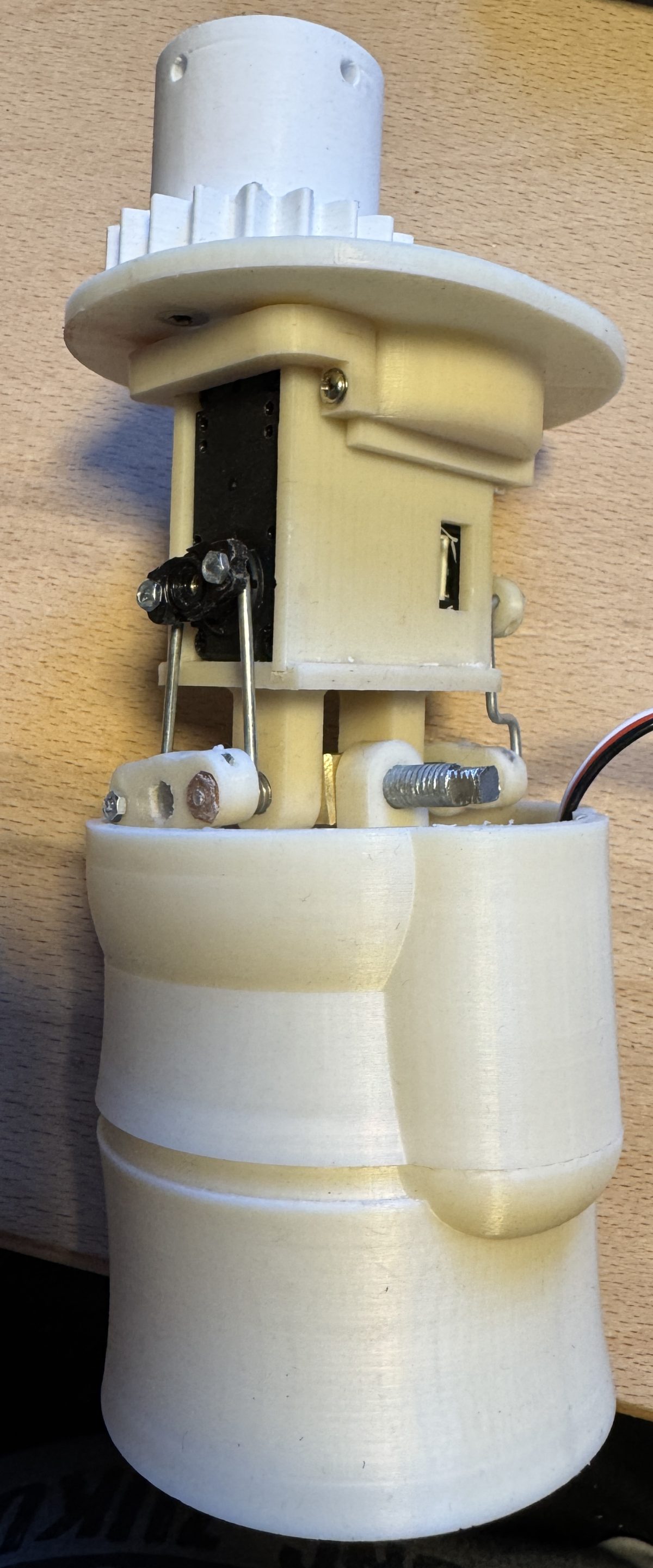
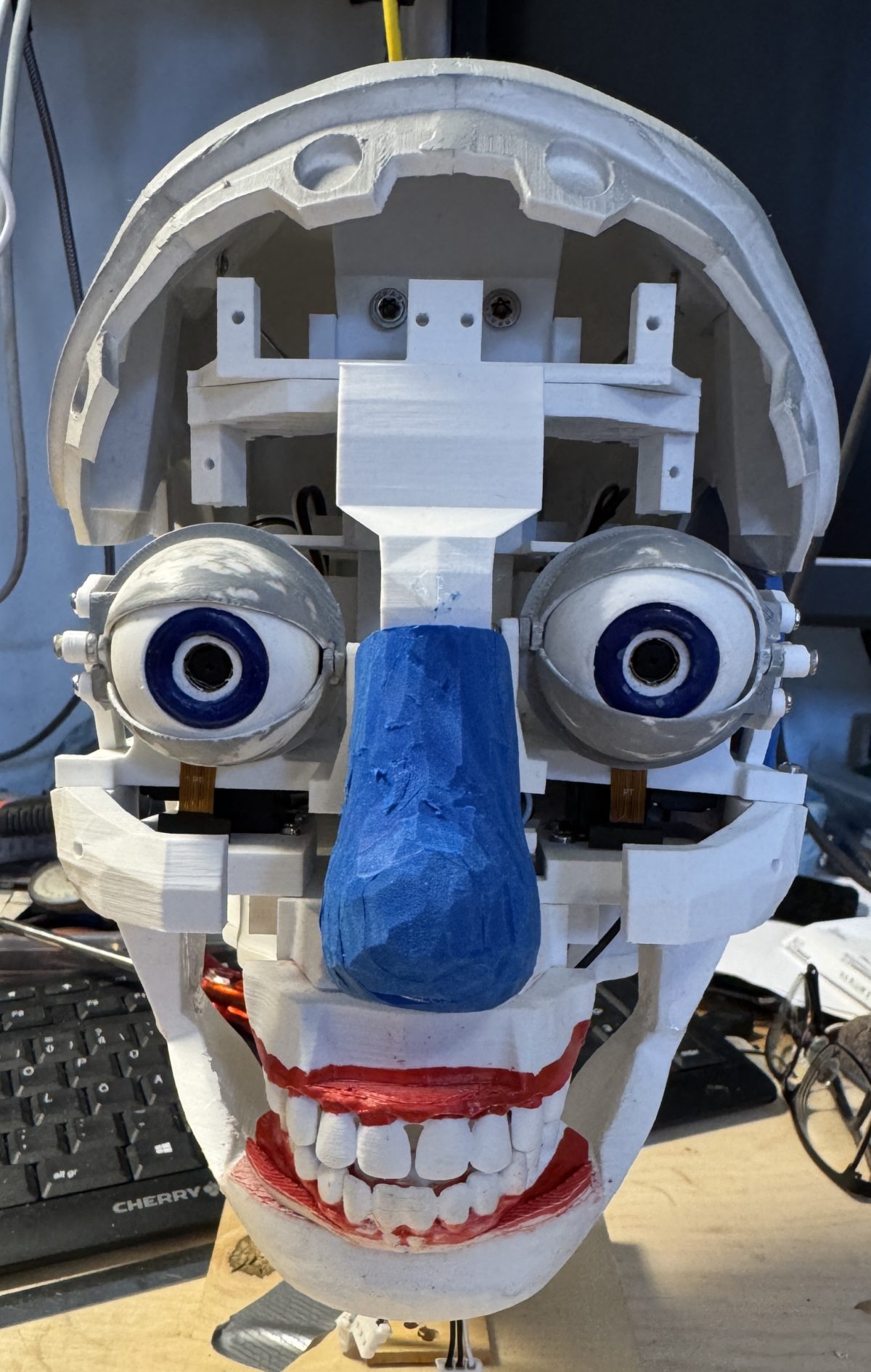
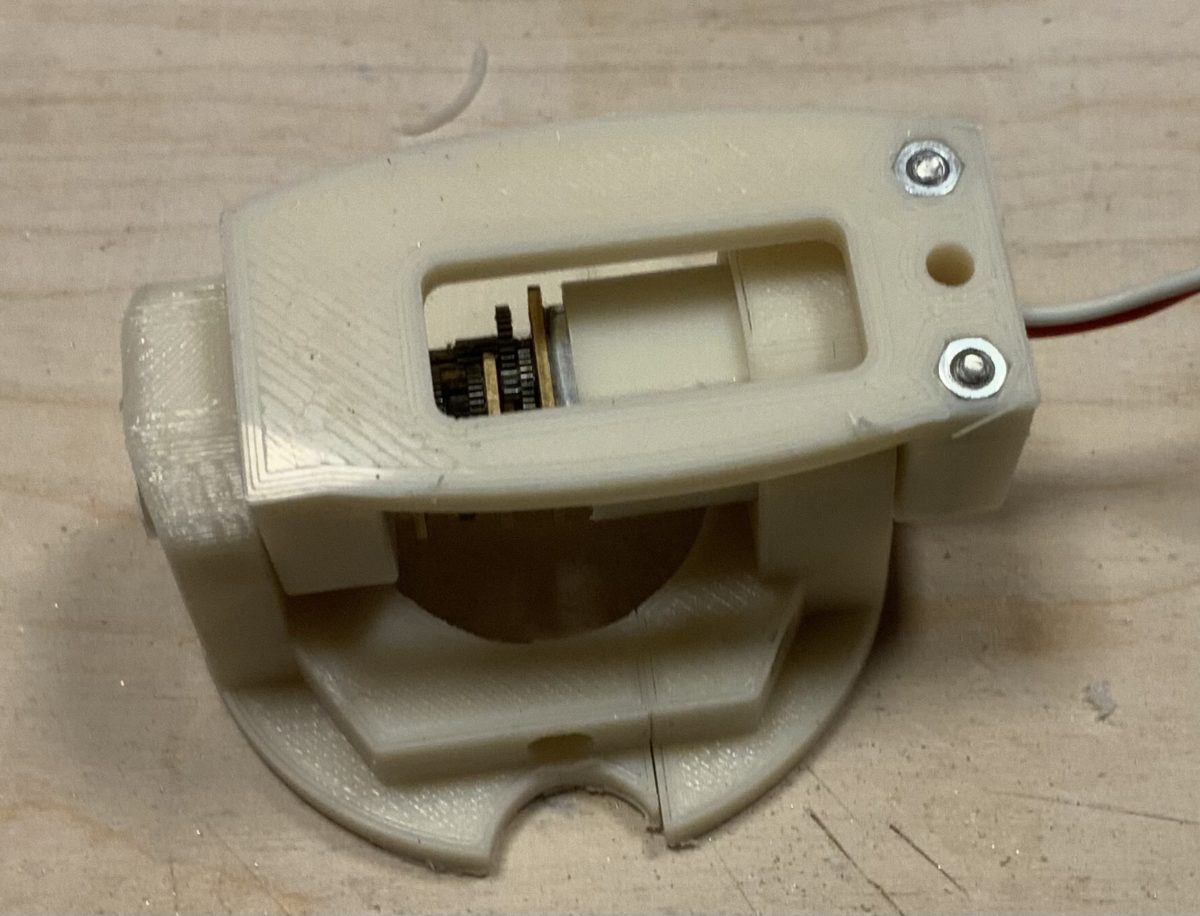
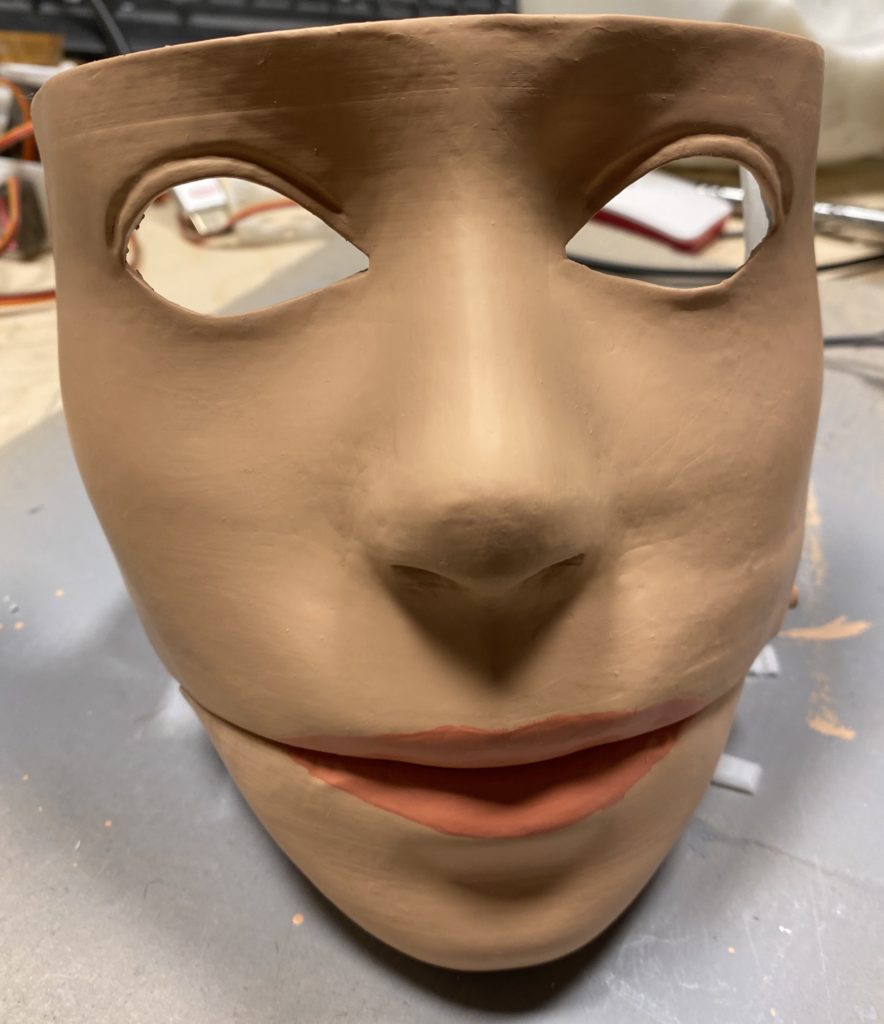
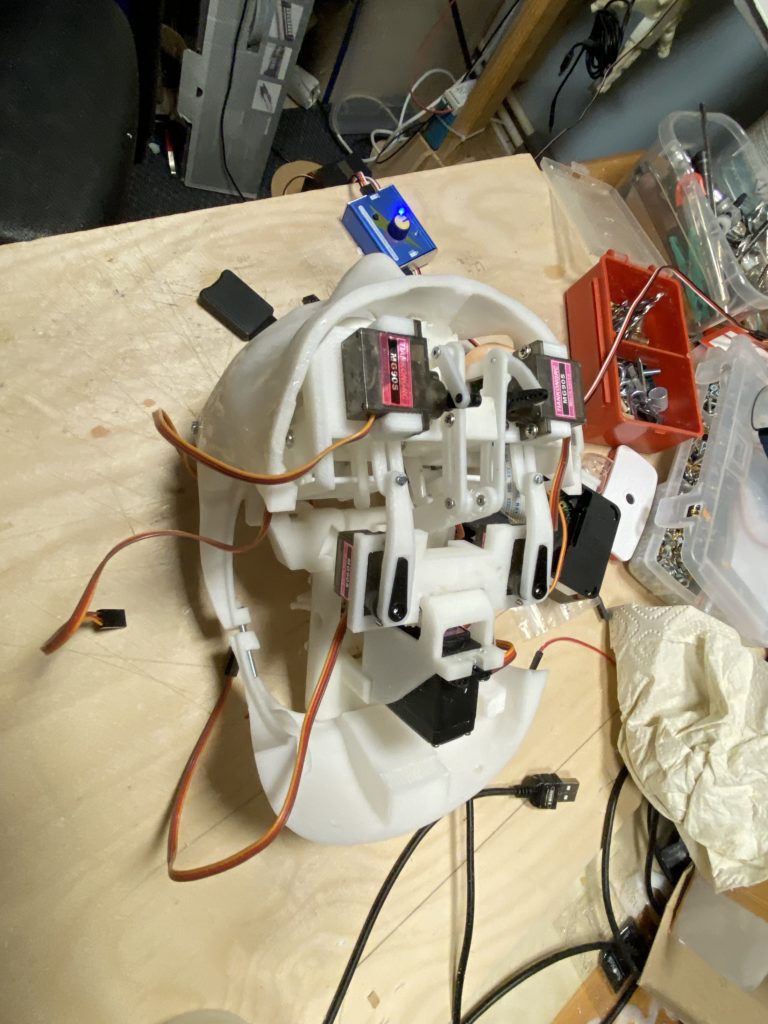
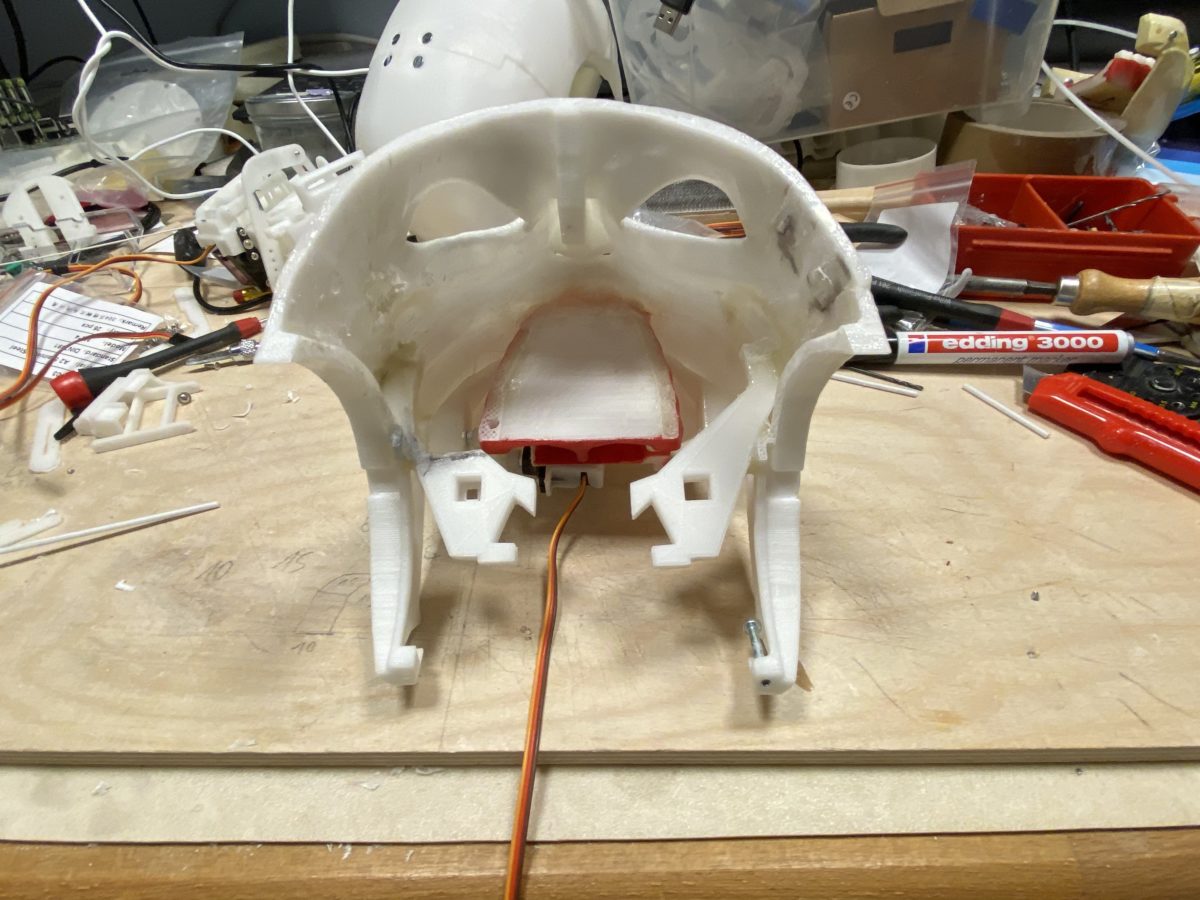
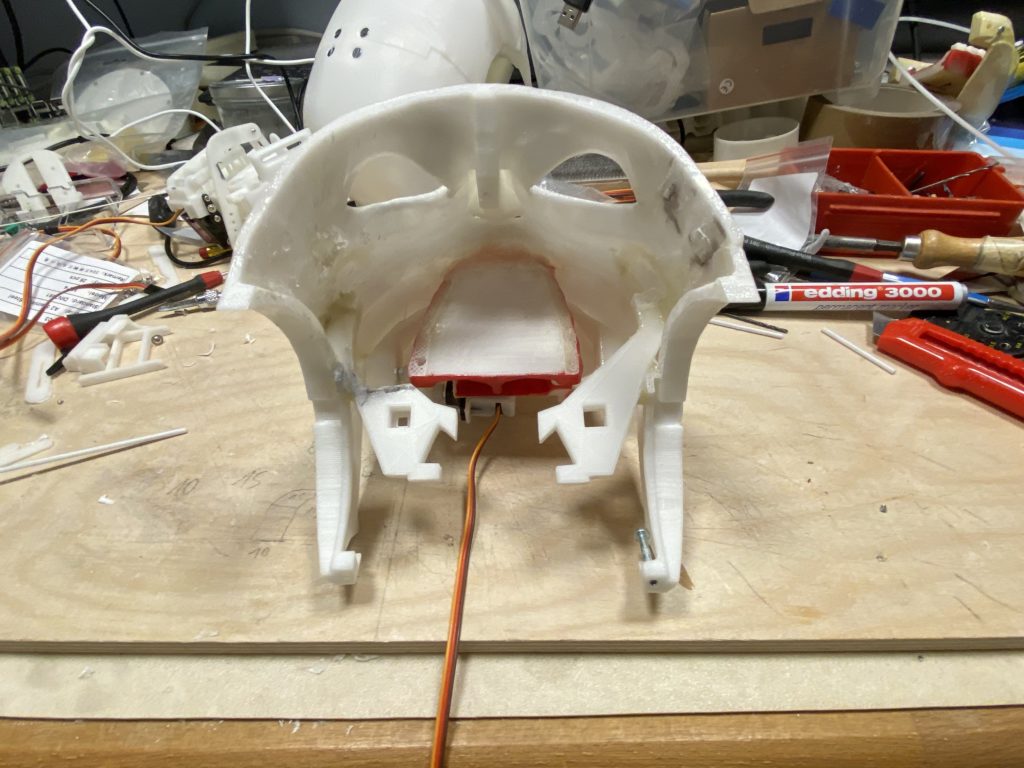
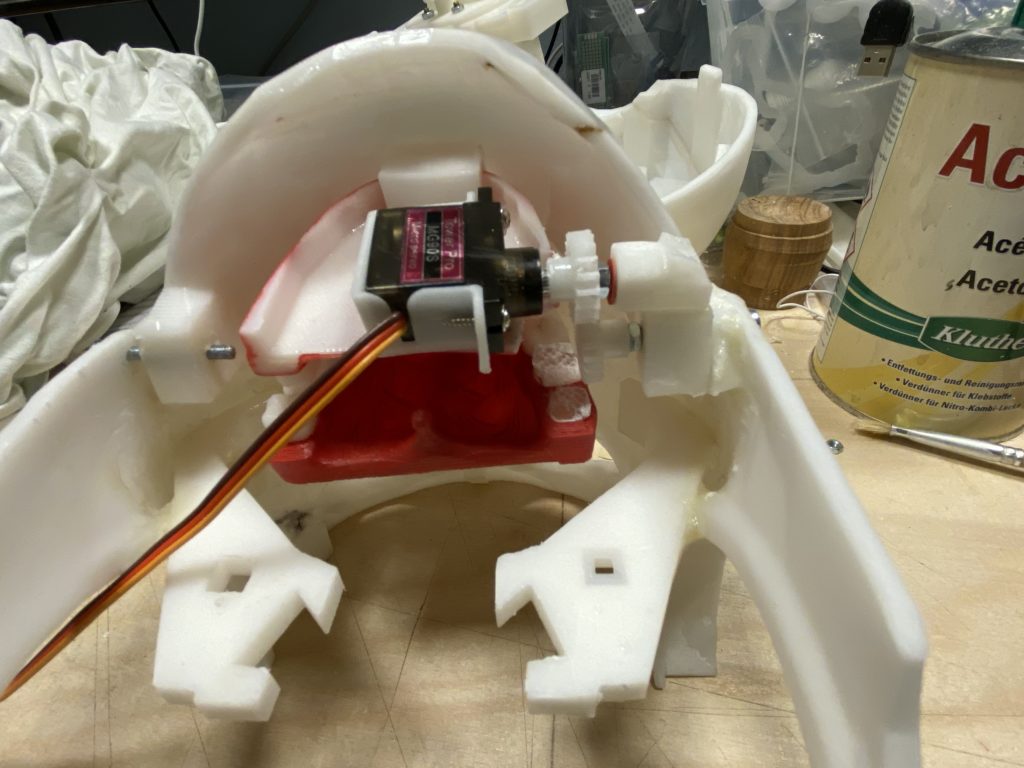
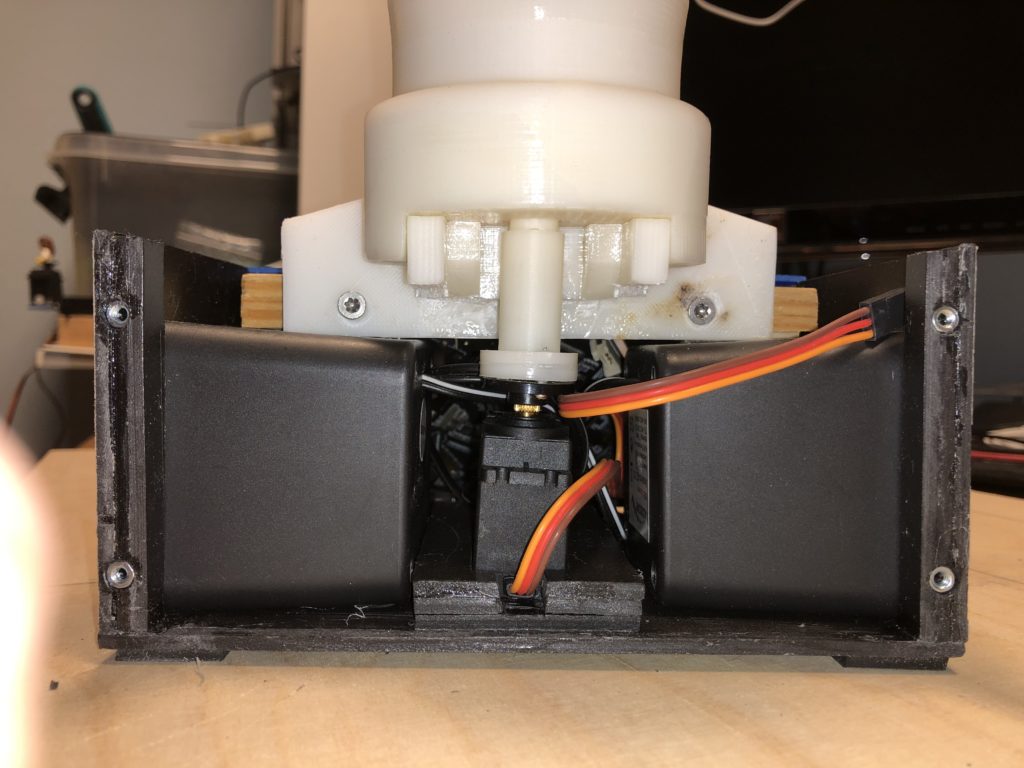
Hier sieht man das Servo für das untere Kinn welches den Kiefer bewegt.






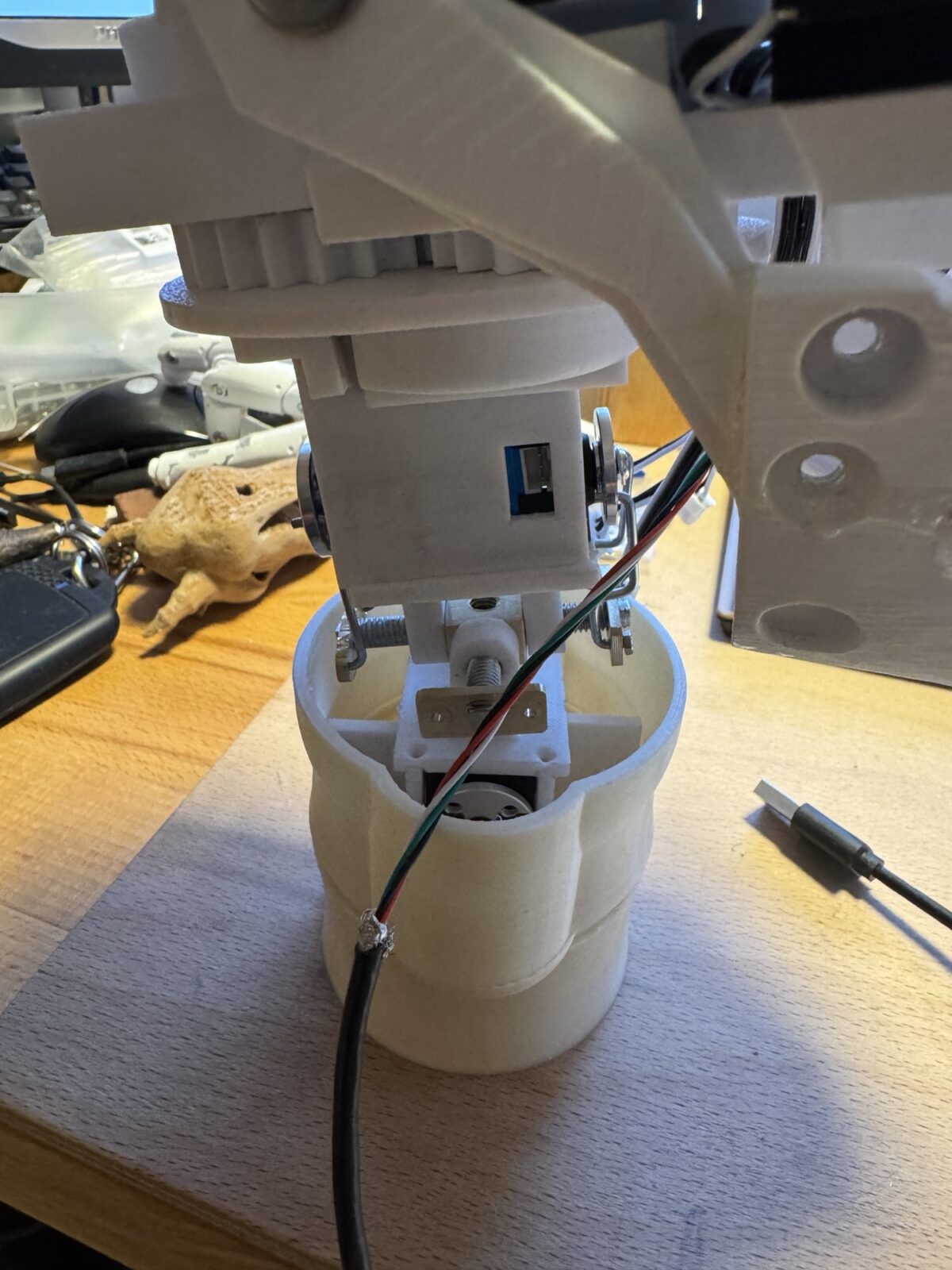
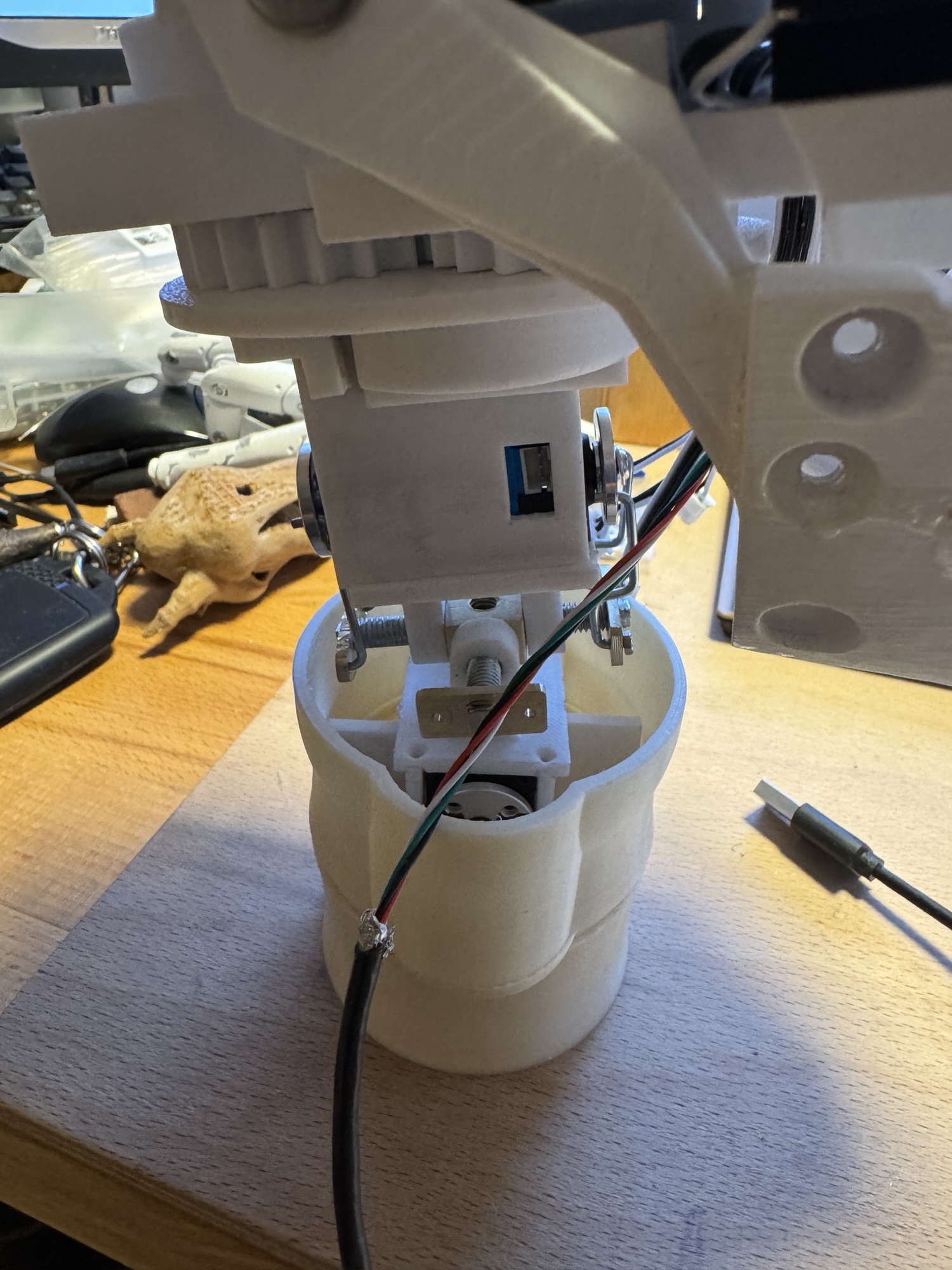
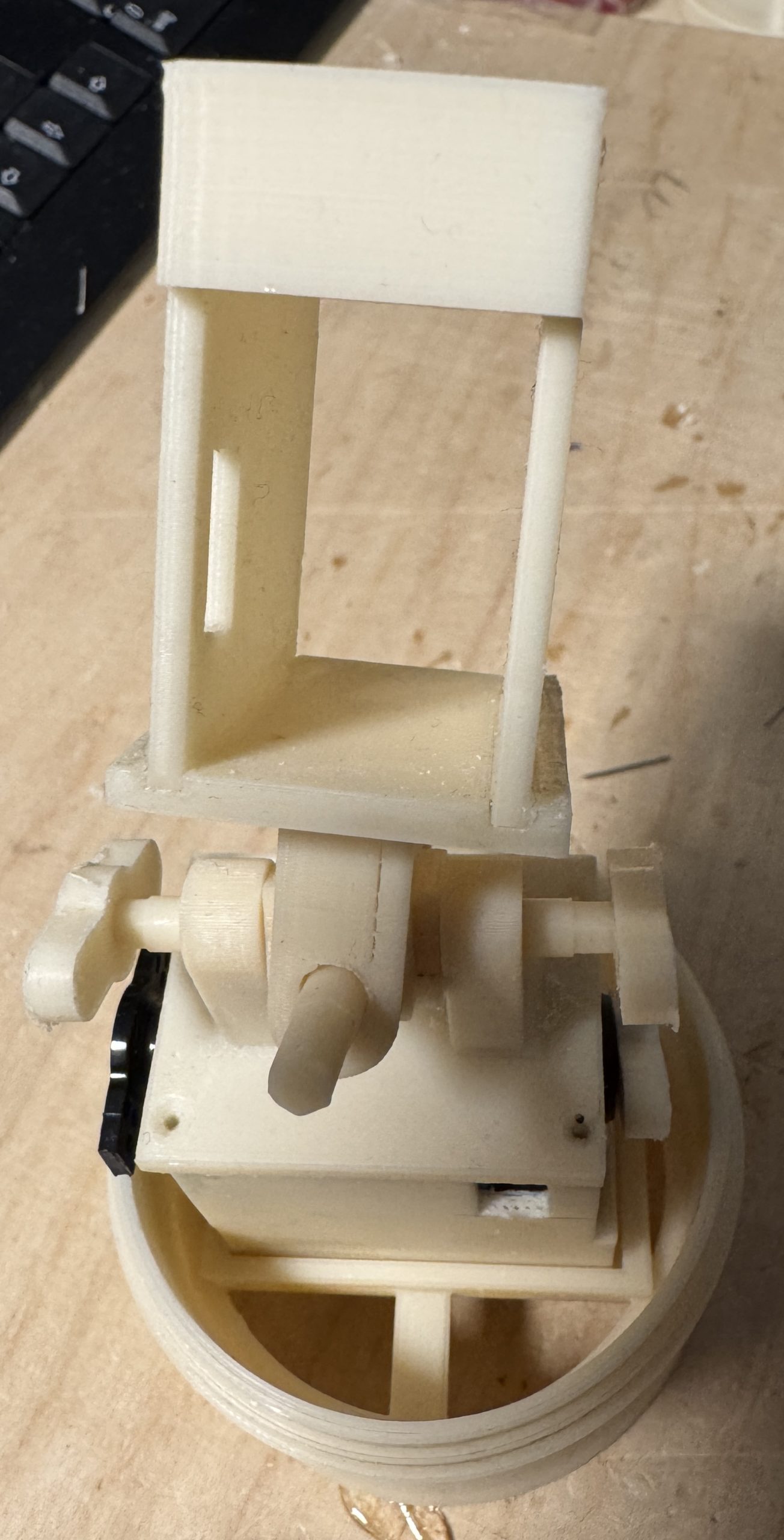
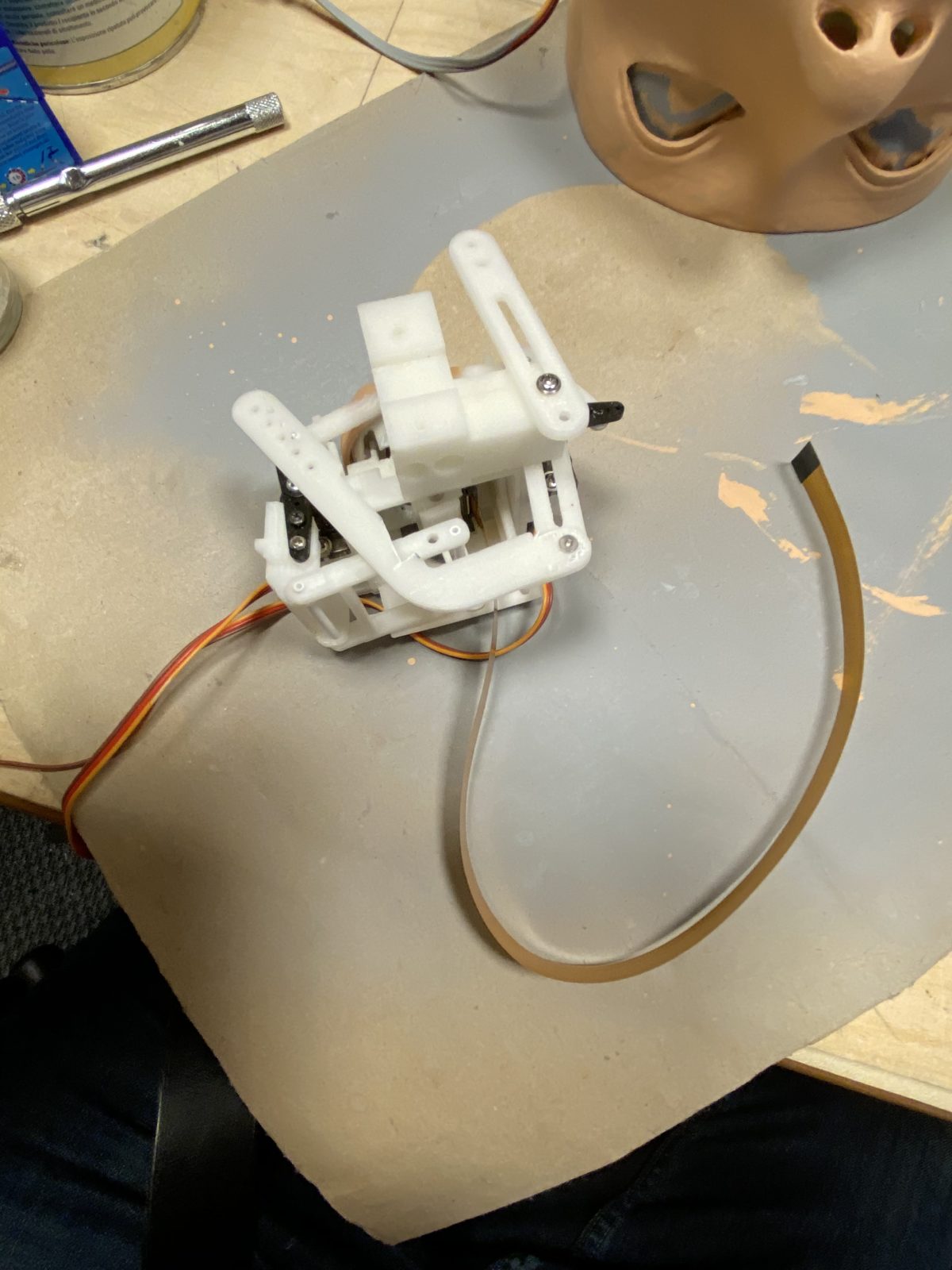
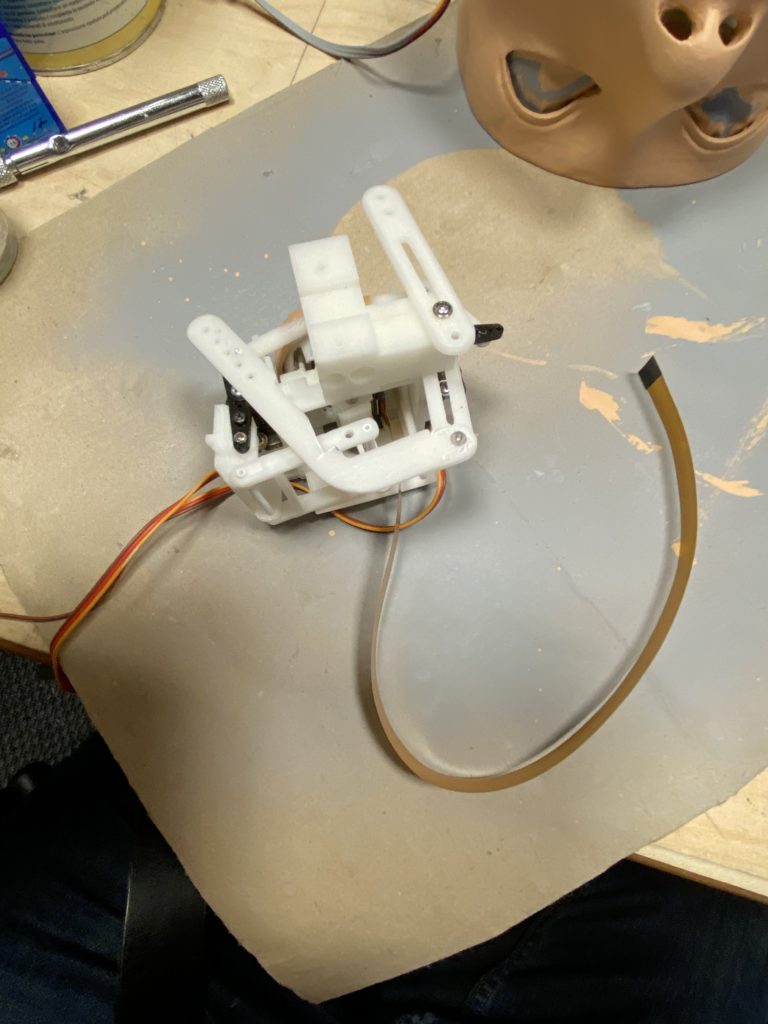
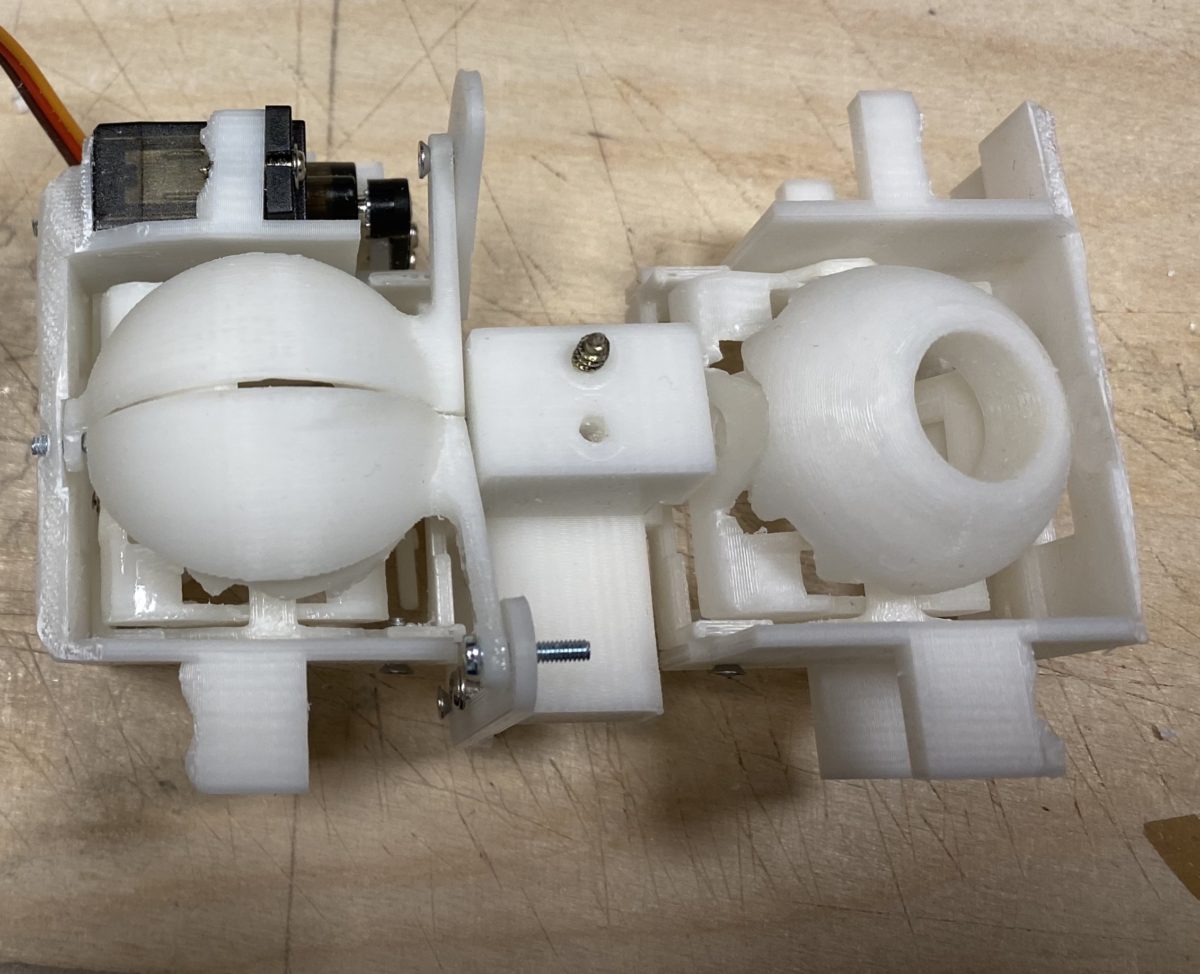
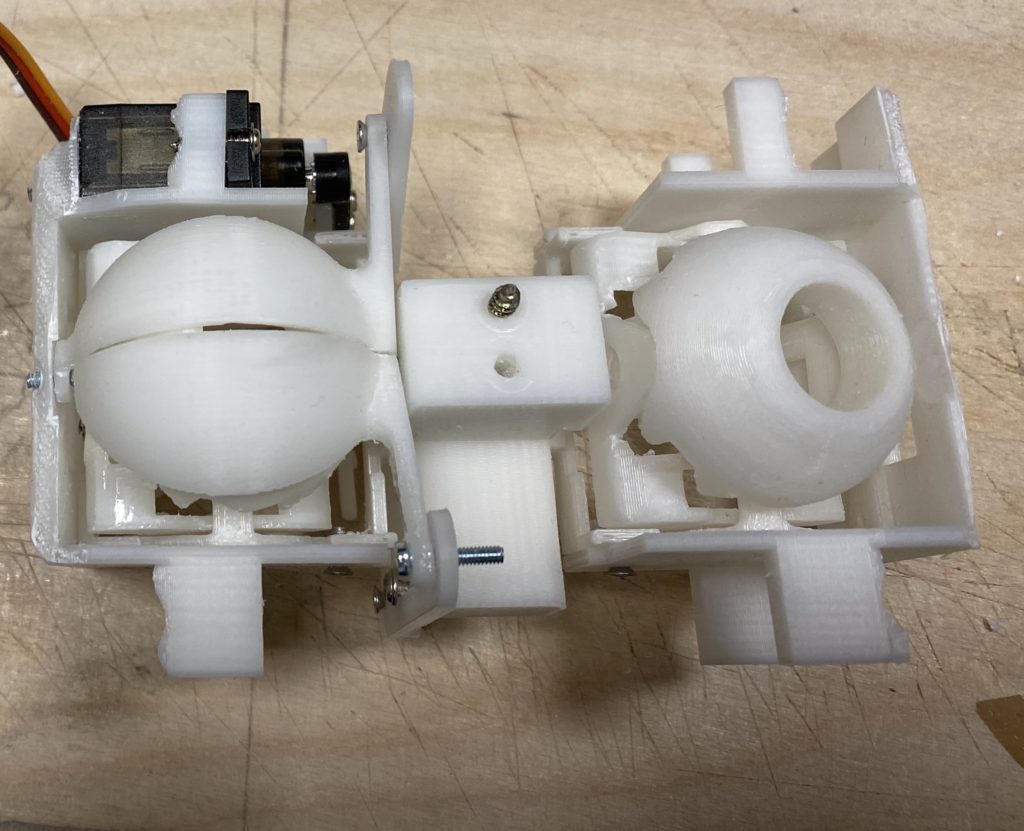
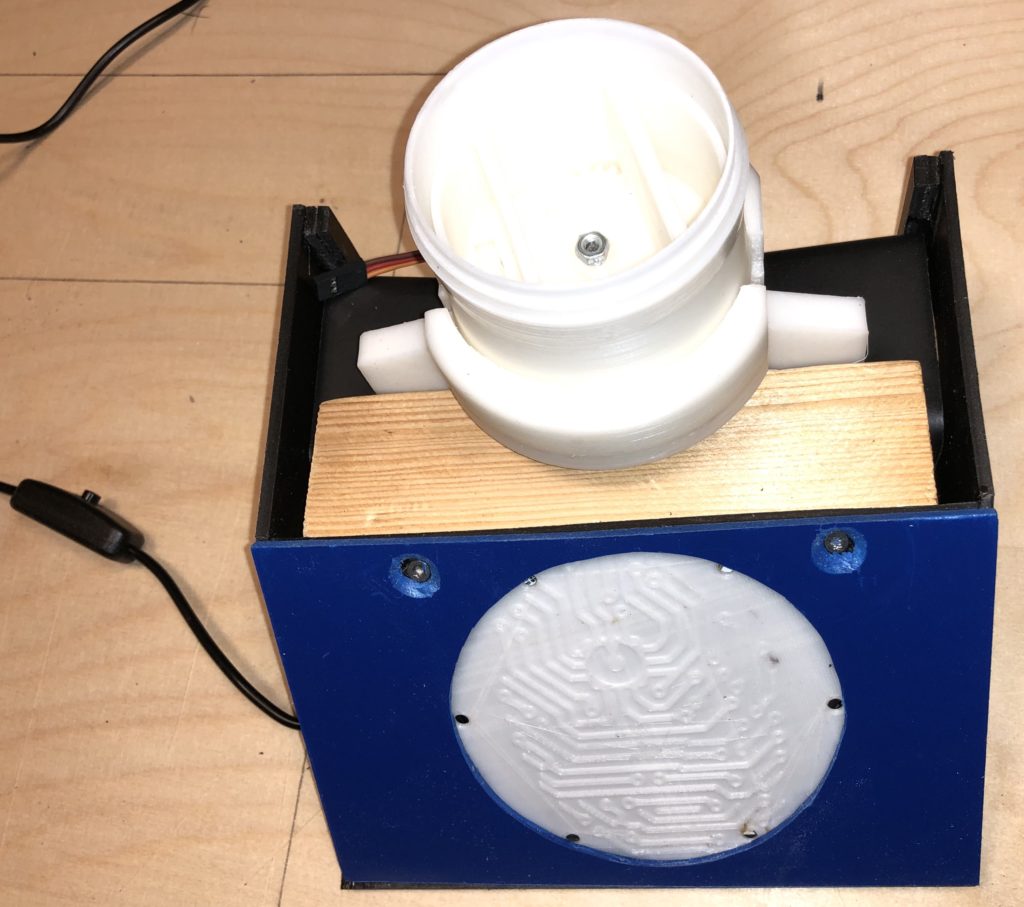
So sieht das innere des Halses aus
 Das Poti ist jetzt eingebunden
Das Poti ist jetzt eingebunden
 über eine Stange wird die Drehung an das Poti weitergeleitet
über eine Stange wird die Drehung an das Poti weitergeleitet
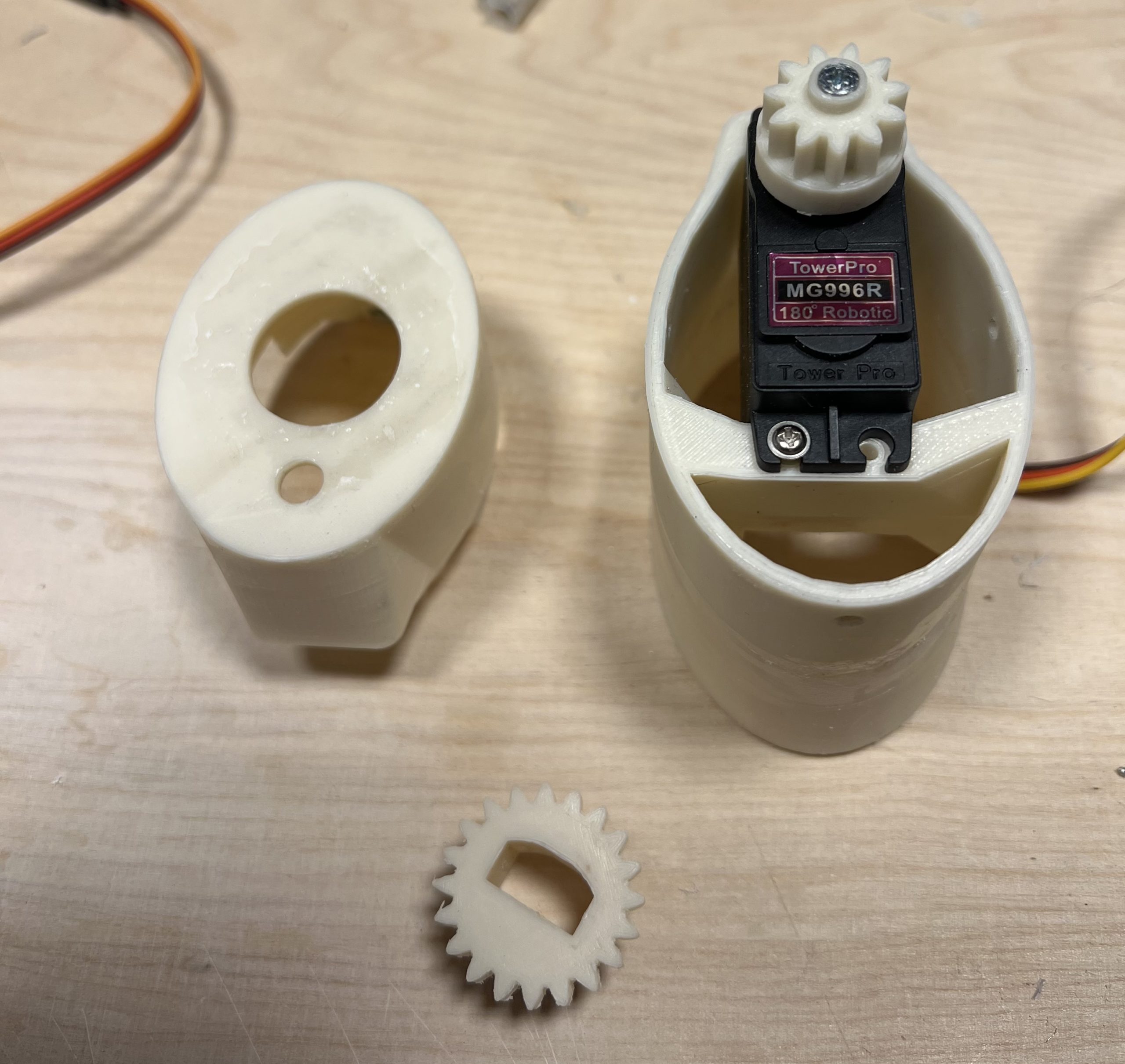
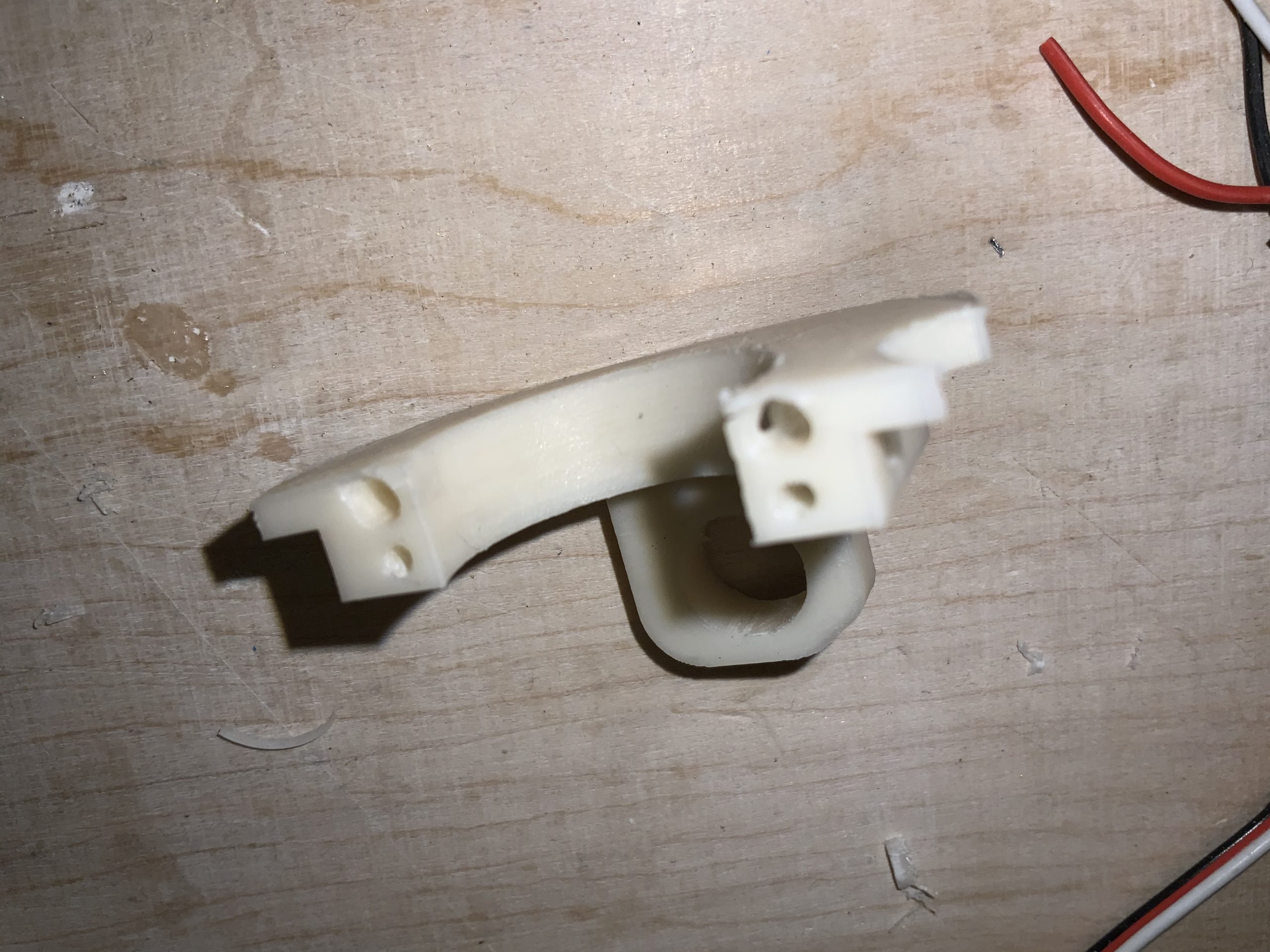
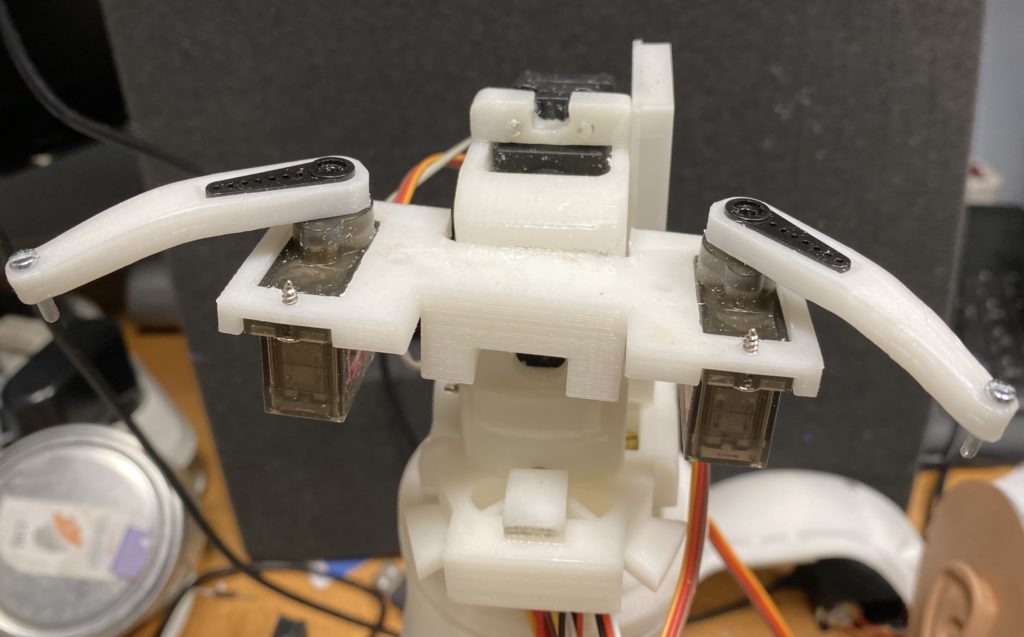
 Der Halter für den Hals mit dem Servo für das Drehen
Der Halter für den Hals mit dem Servo für das Drehen





{kind=link}