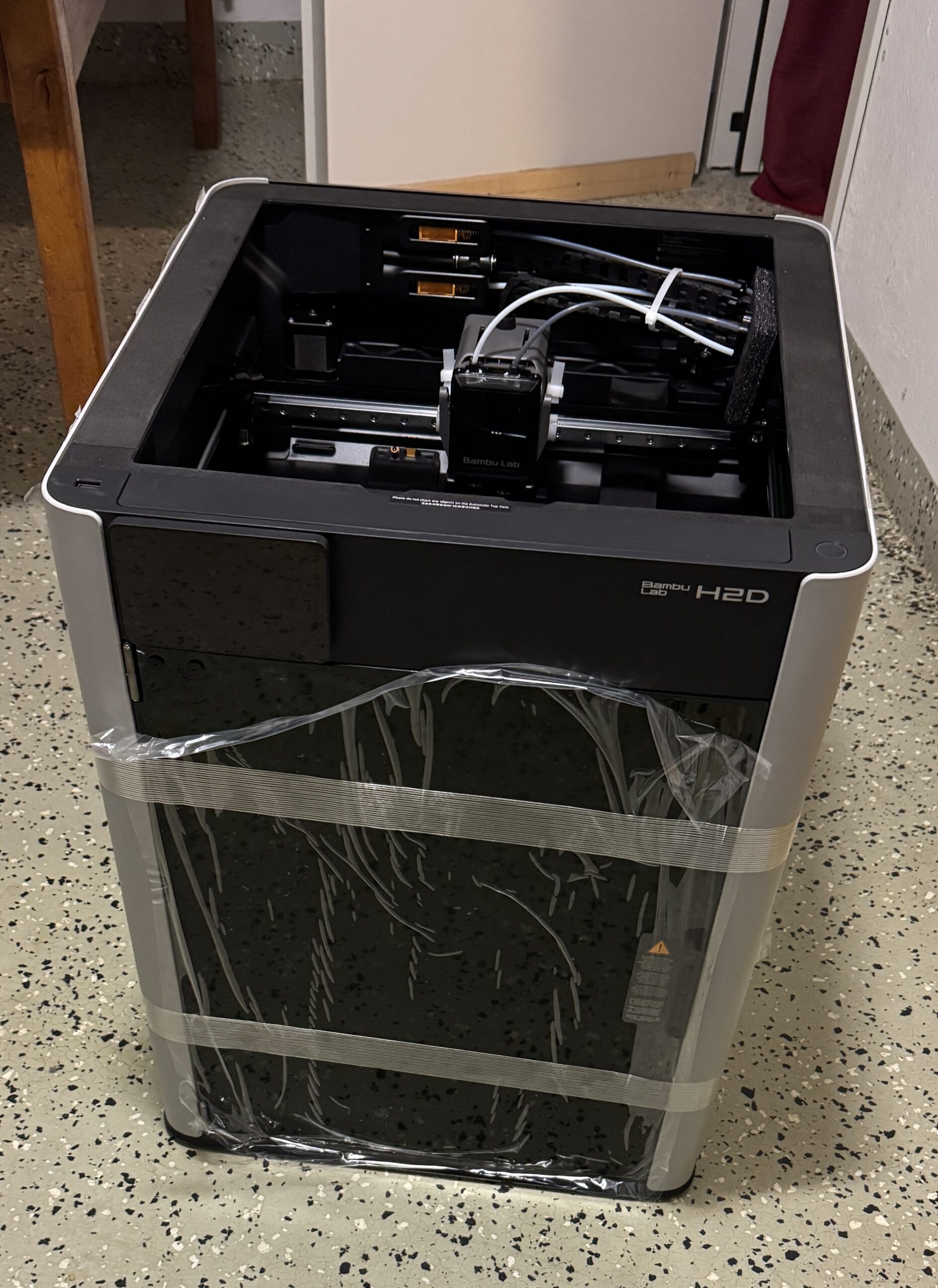
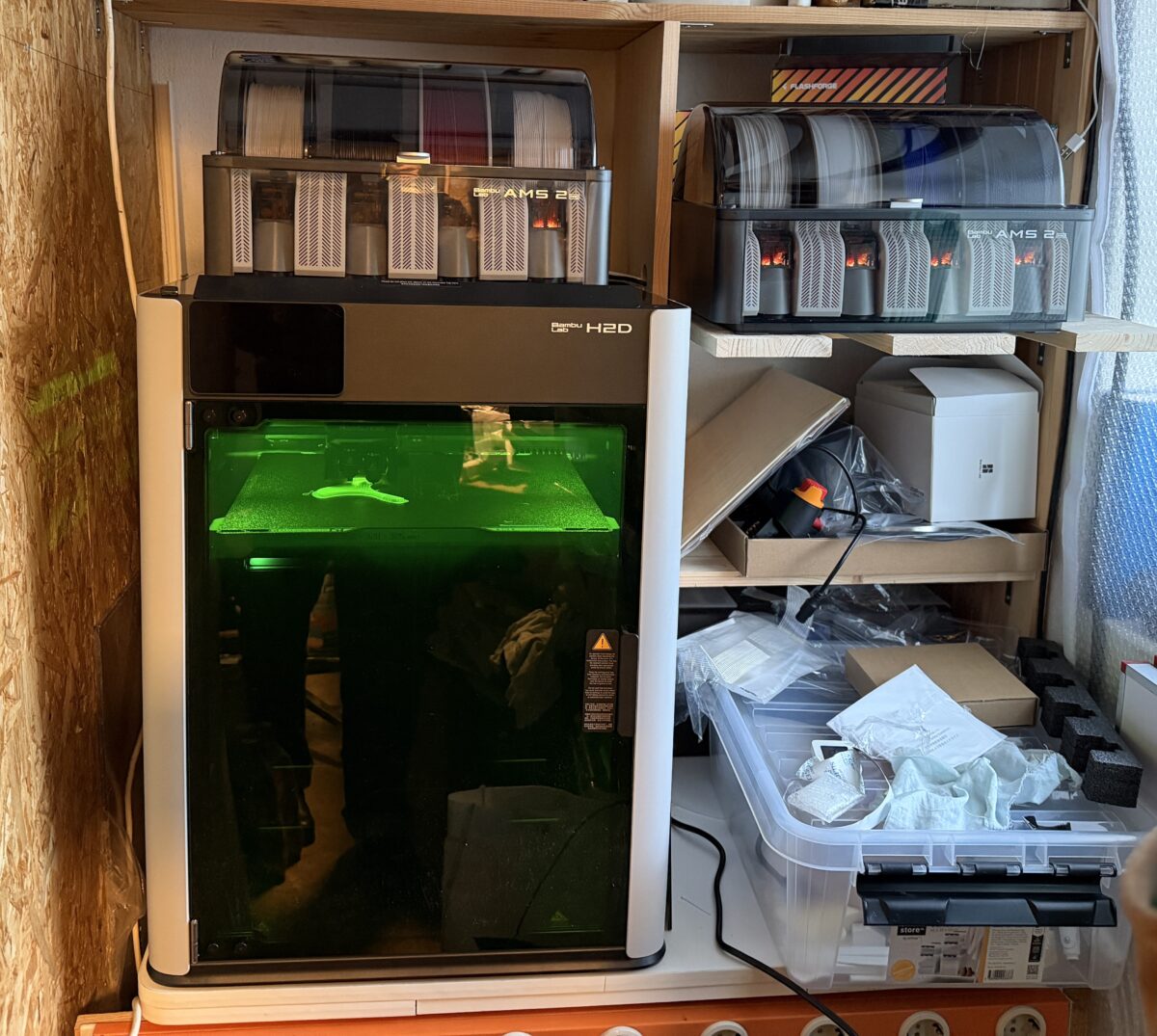
Der neue 3D Drucker H2D . Nach dem Eintreffen gleich ein 2. AMS bestellt, man gönnt sich ja sonst nichts




Der neue 3D Drucker H2D . Nach dem Eintreffen gleich ein 2. AMS bestellt, man gönnt sich ja sonst nichts



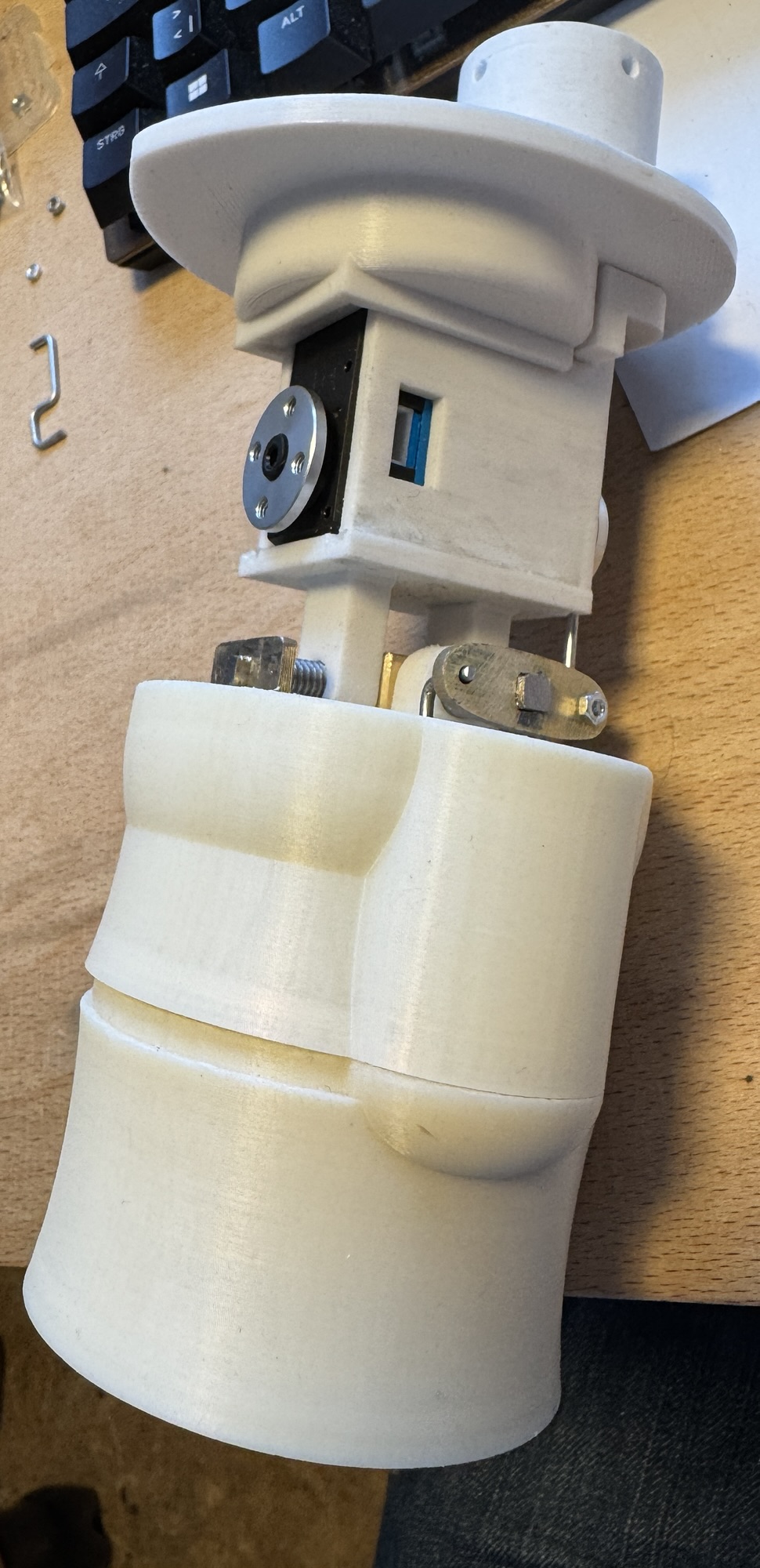
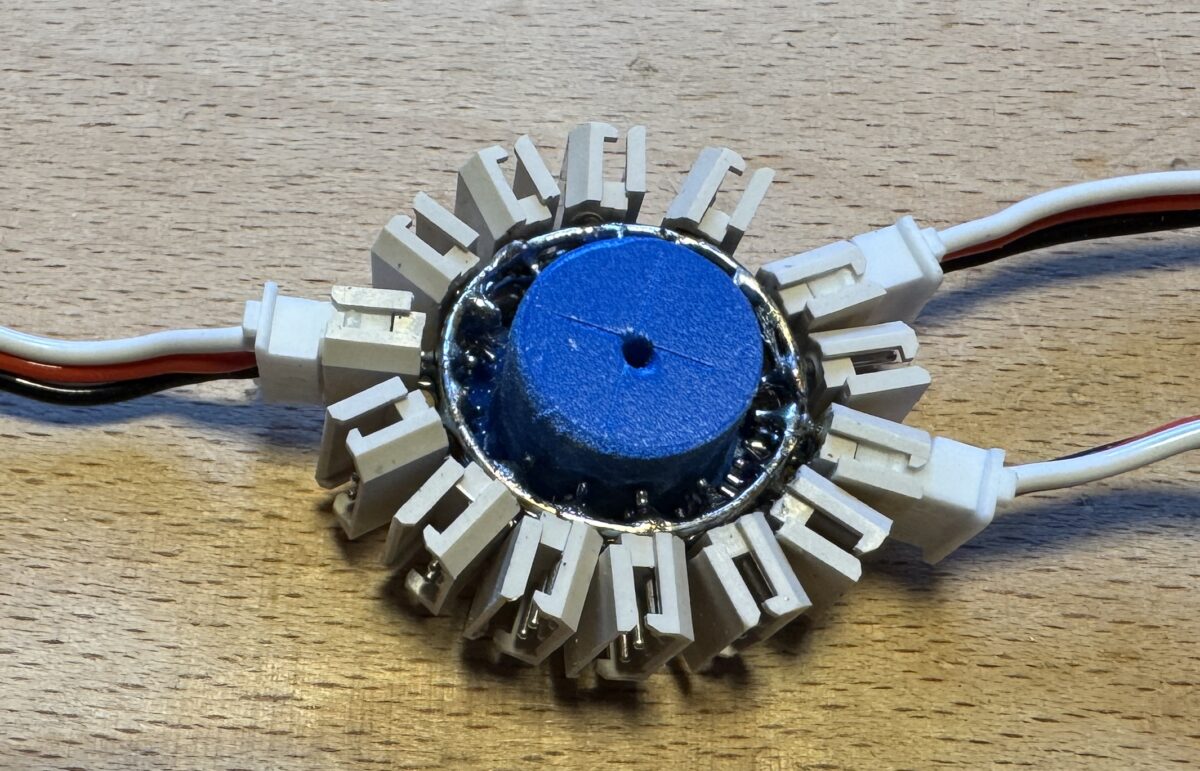
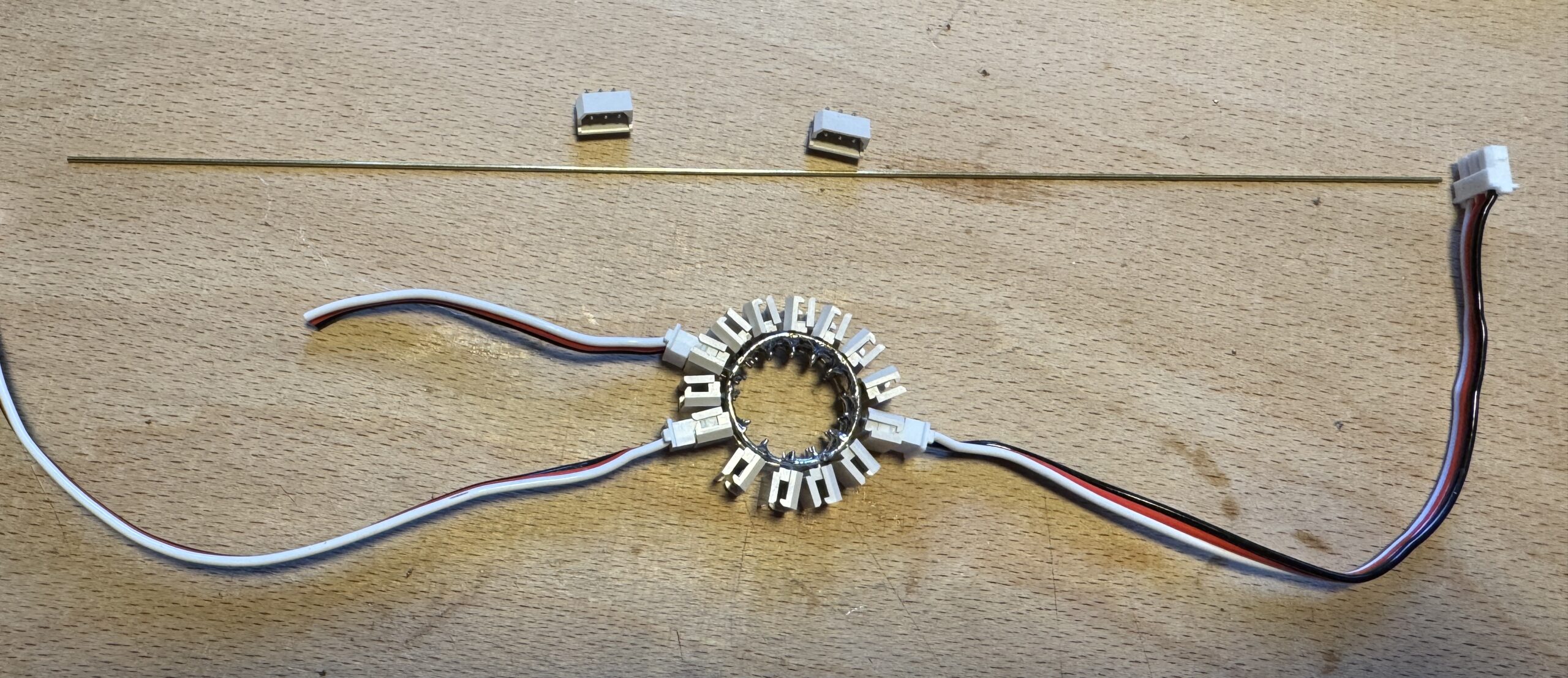
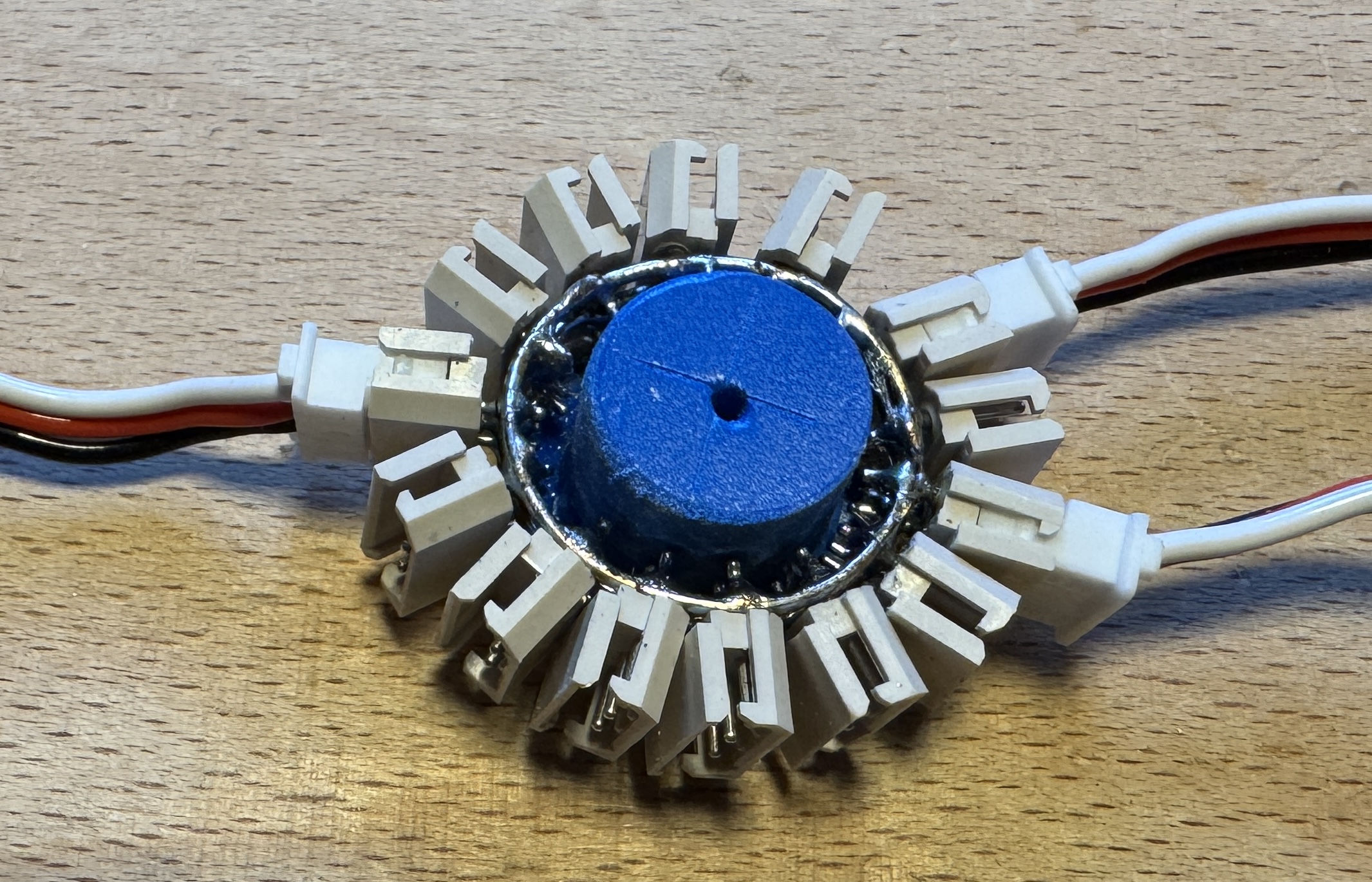
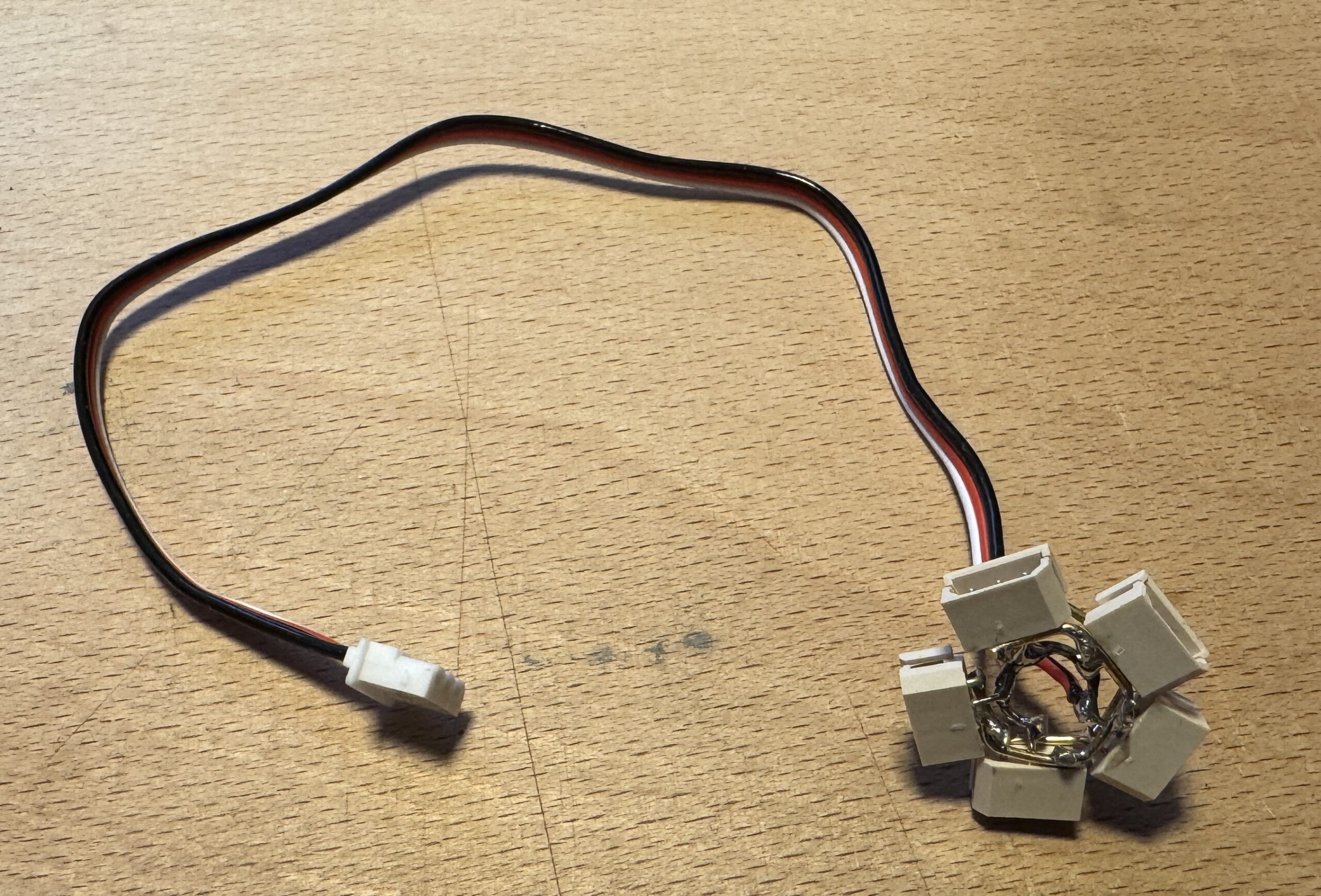
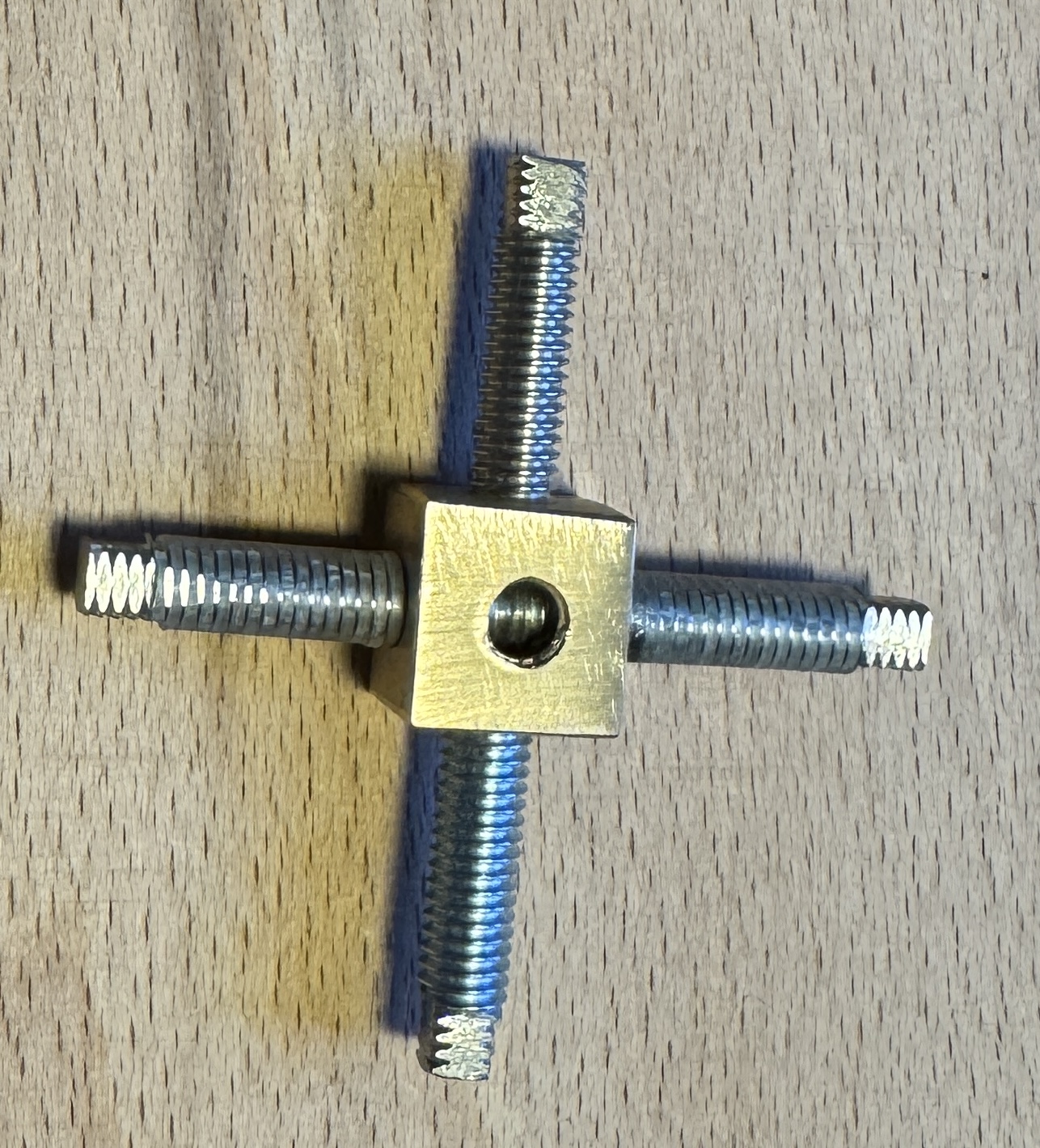
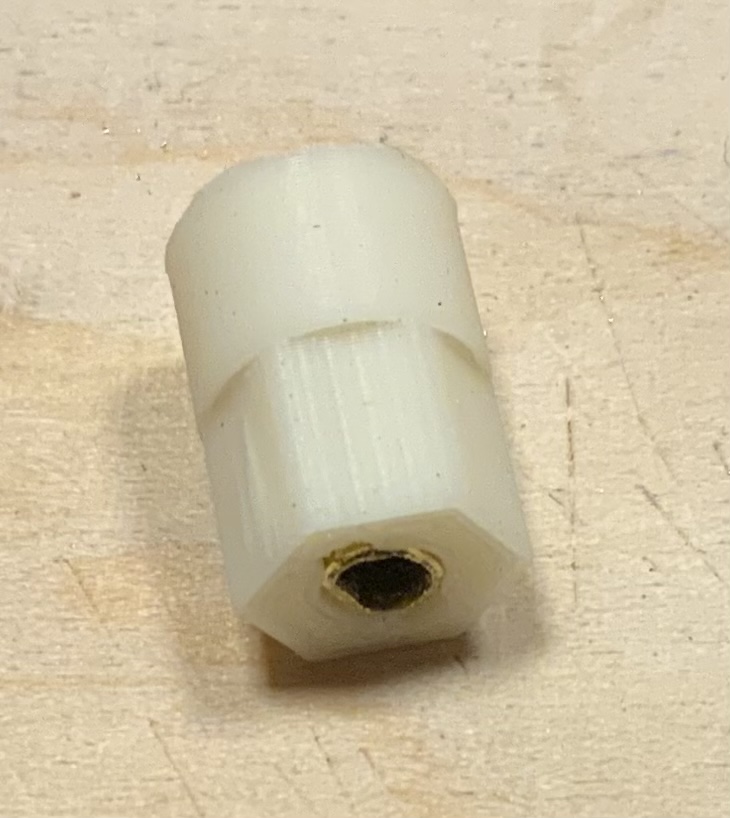
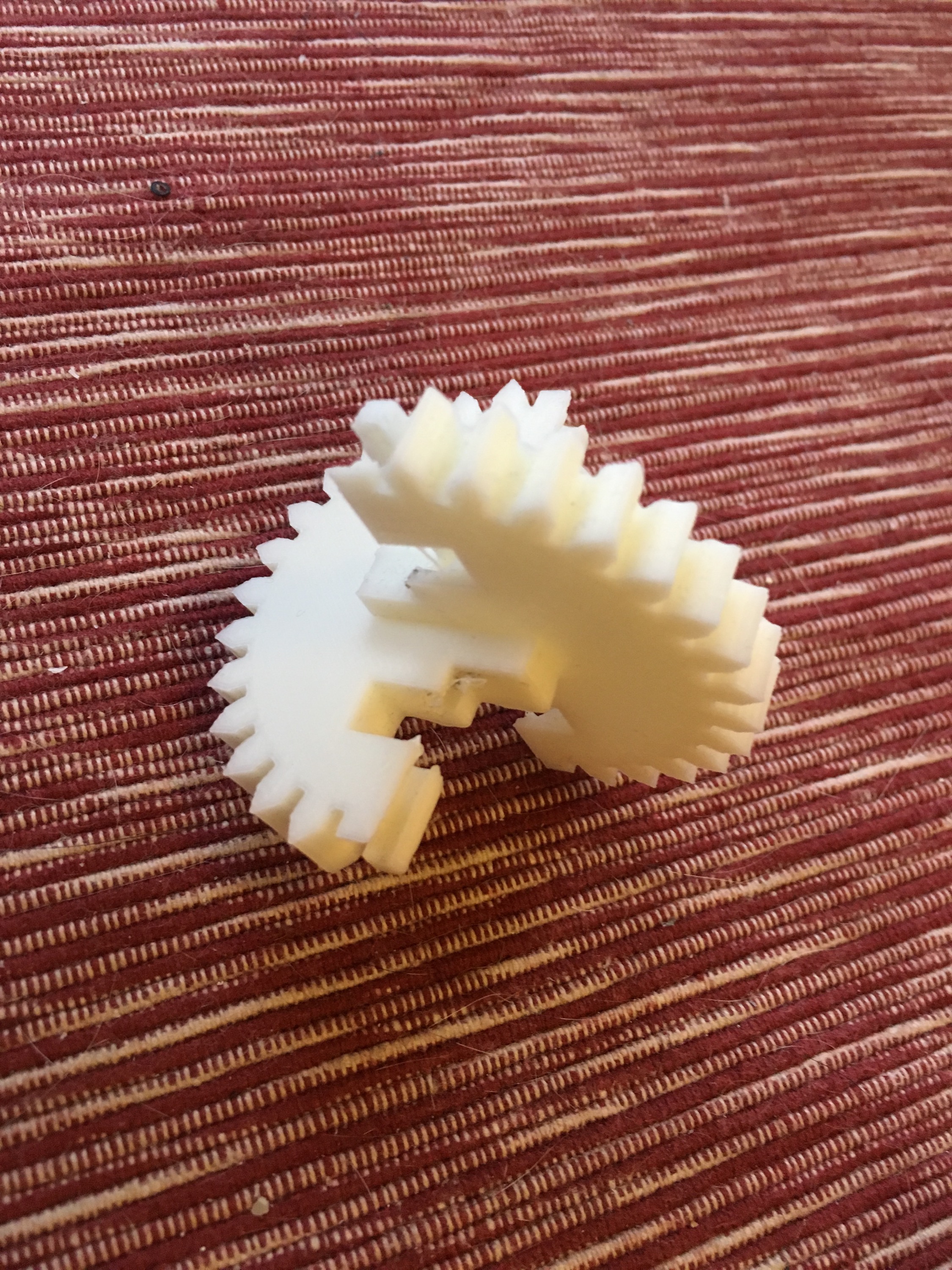
Das aus ABS gedruckte Kreuzgelenk hat sich im Bertrieb sehr oft verzogen.
Nuń habe ich es von einem verwandten Maschinenschlosser auf der Drehbank anfertigen lassen.

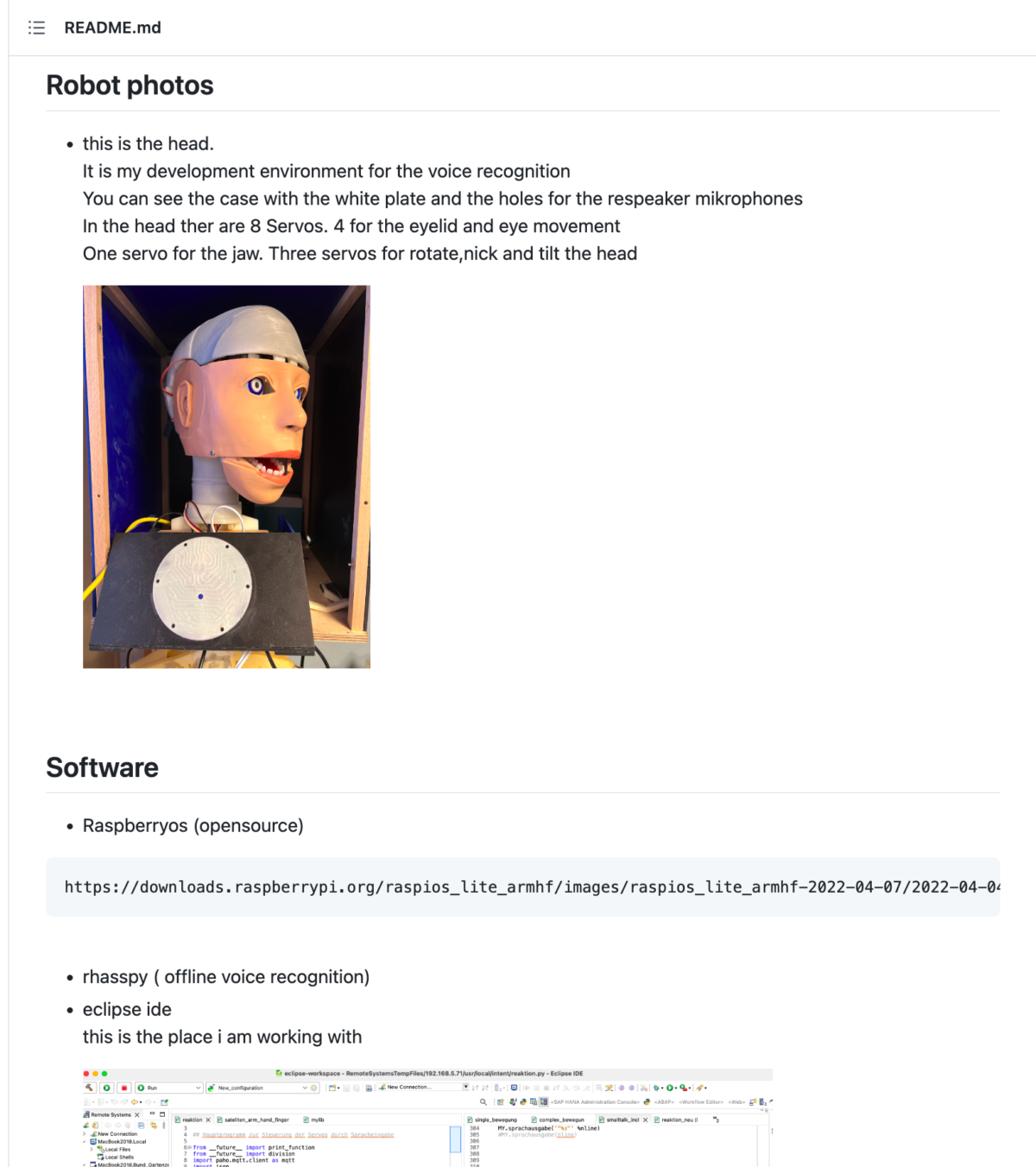
Das ist die Entwicklungsumgebung eclipse. Unten Links der Rpi Zero für die Hand. Darüber der RPi 4 mit der zentralen Spracherkennung






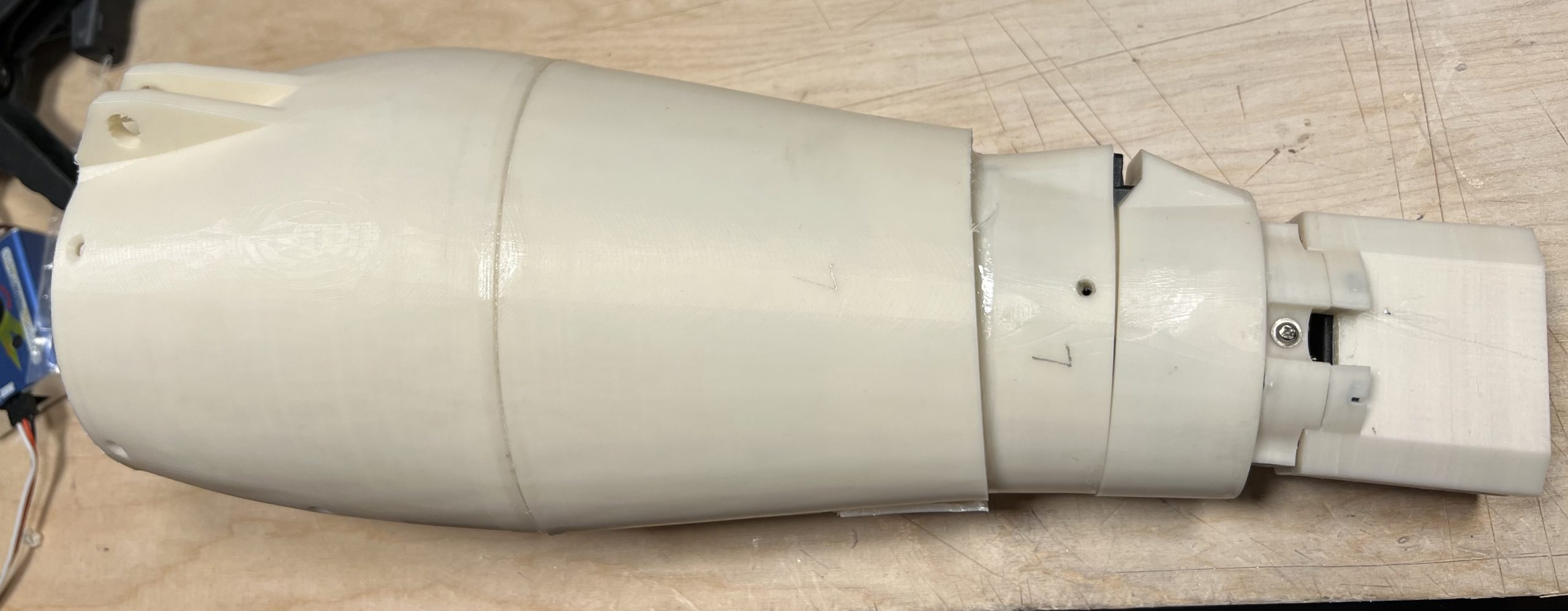
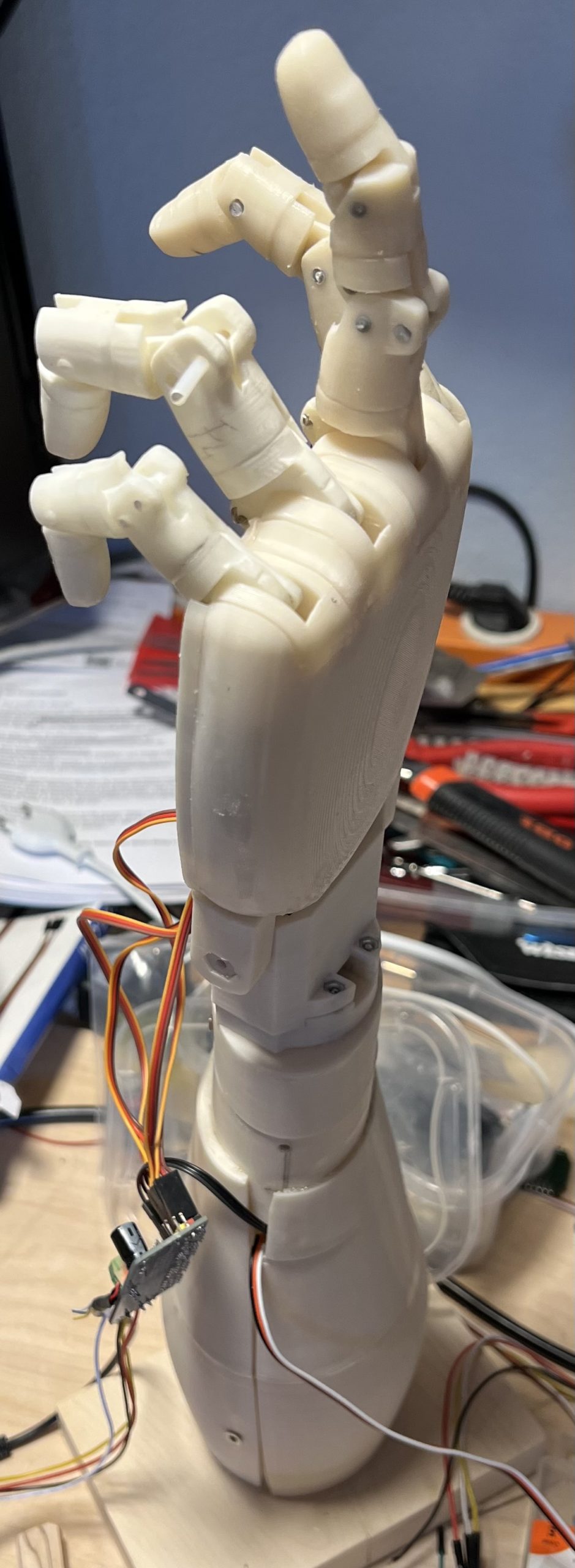
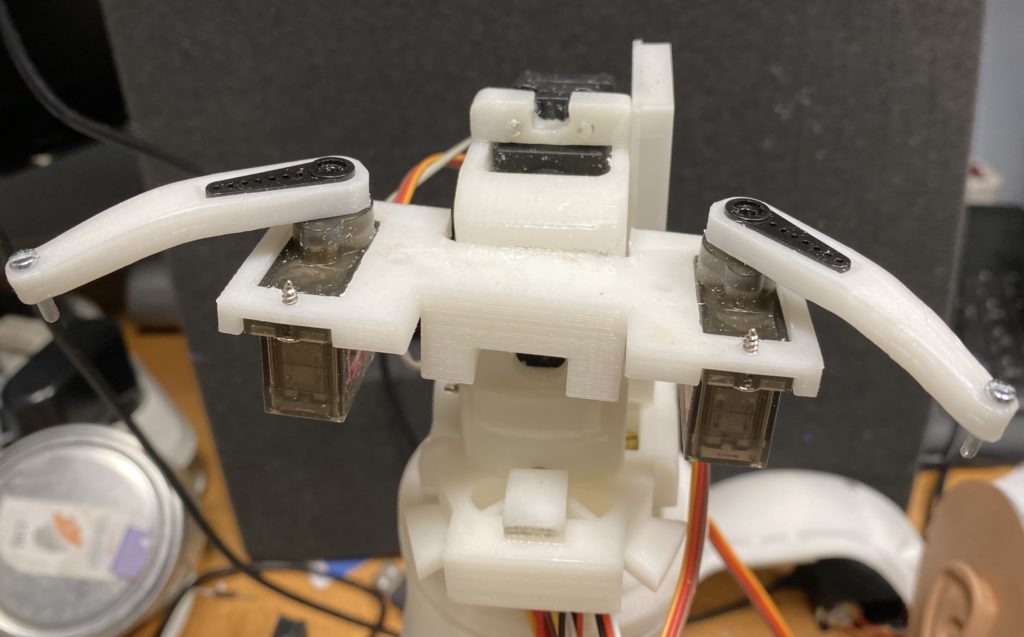
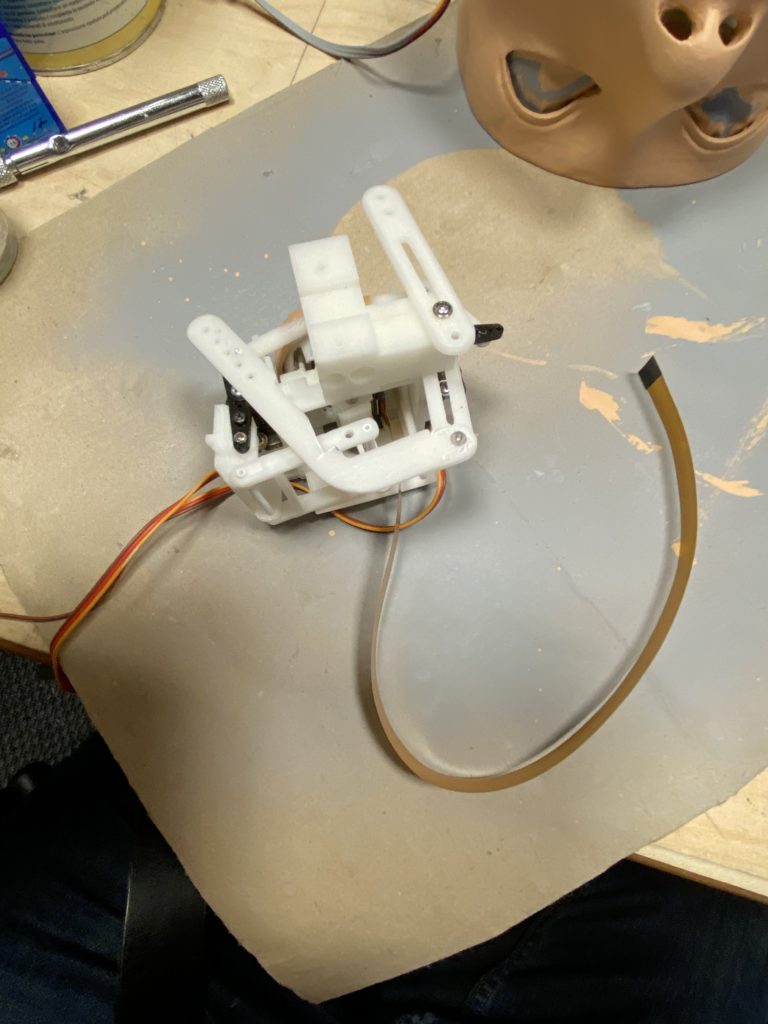
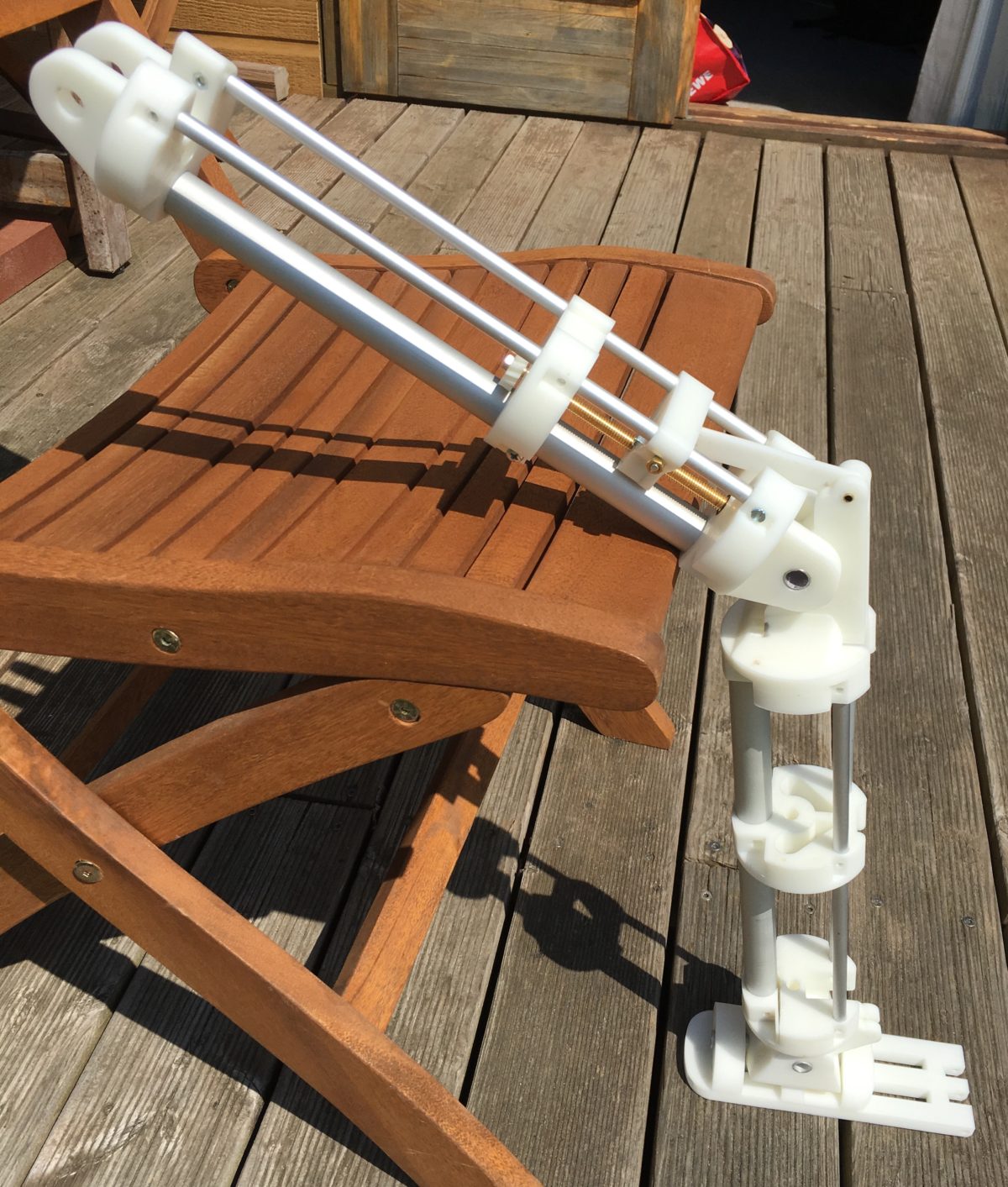
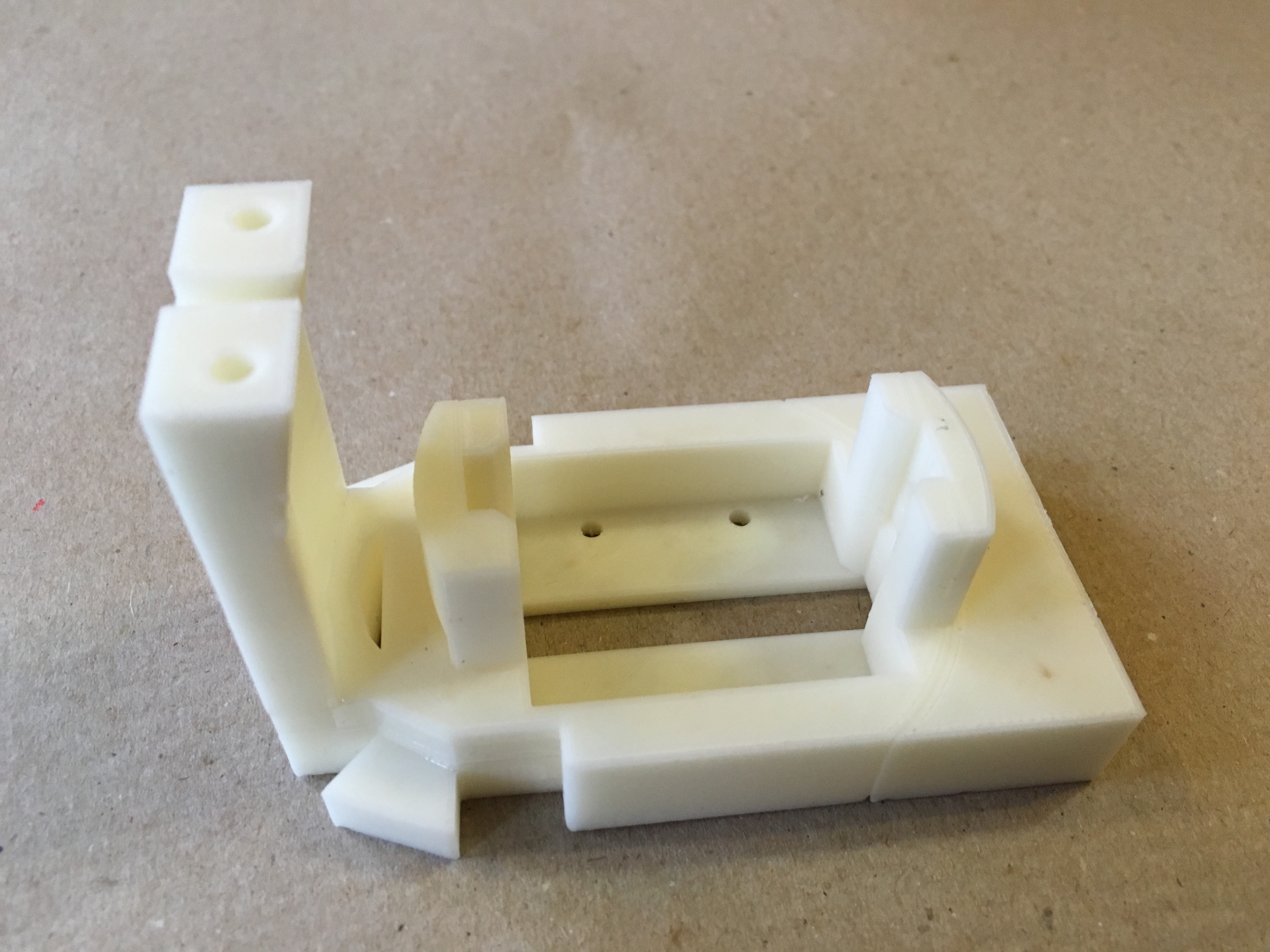
Ich habe den original Arm verändert damit der Klappmechanismus hinzugefügt werden kann ohne das sich die länge des Armes ändert








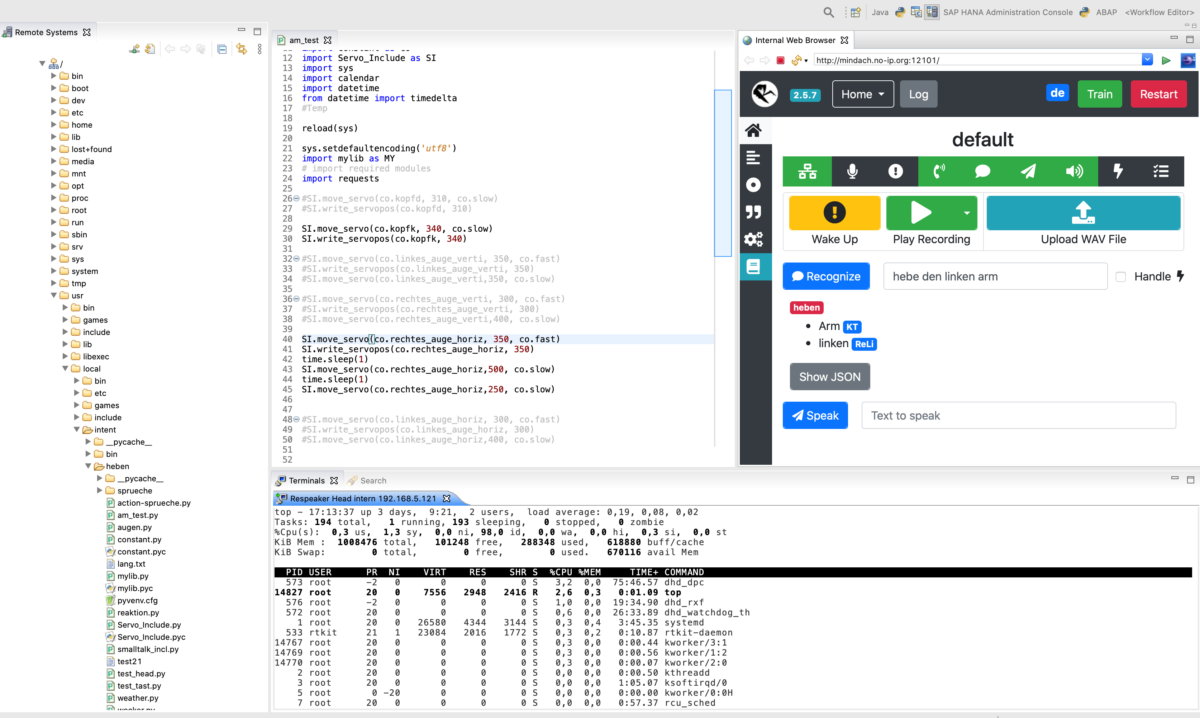
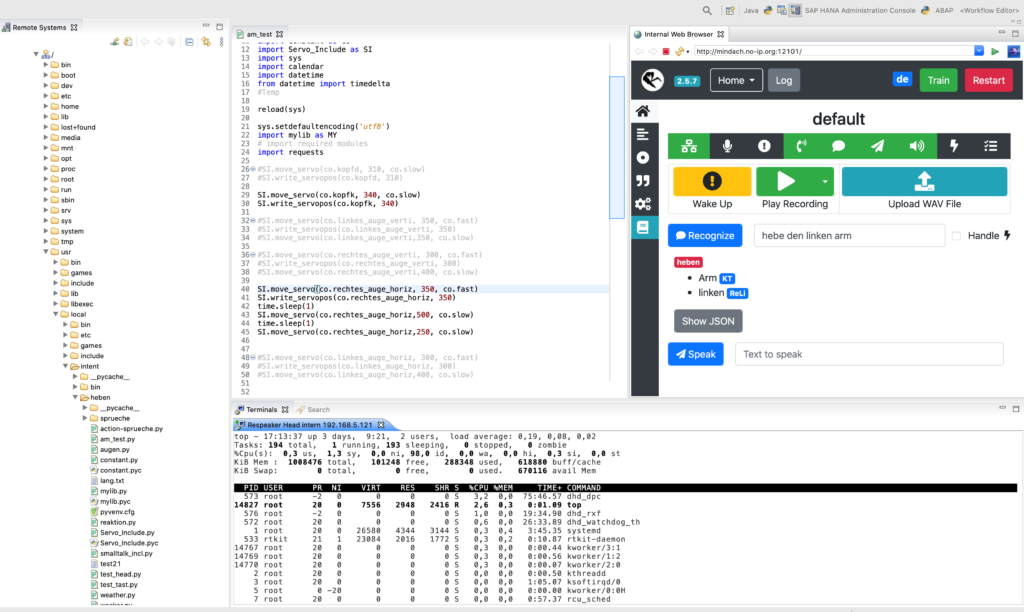
Die eclipse IDE: links der Remote explorer mit dem Zugriff auf den Respeaker Core v2.
In der Mitte die Python Datei zum Testen. Rechts die Weboberfläche für Rhasspy.
Unten der ssh Zugriff auf den Respeaker Core v2 mit einem Debian OS und der Ausgabe von Top.
Auf dem Respeaker läuft ein Docker Image mit Rhasspy 2.5.7 .
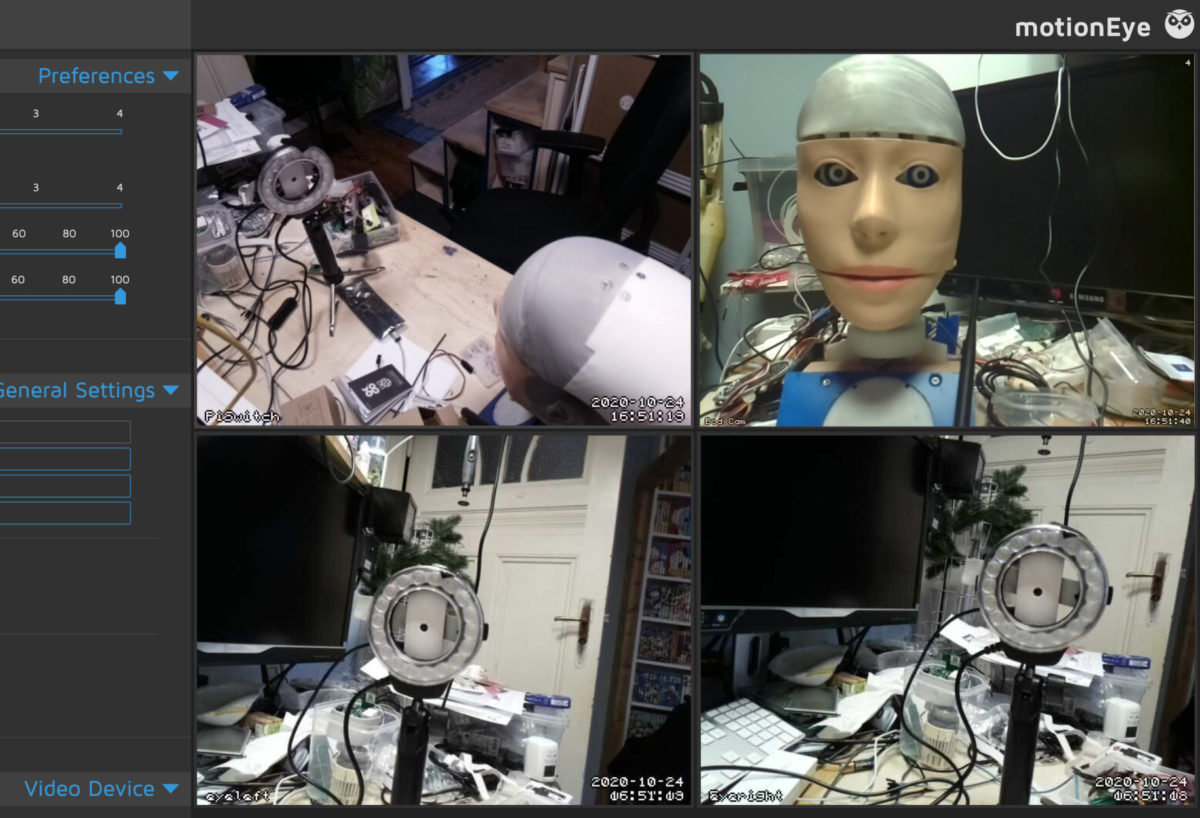
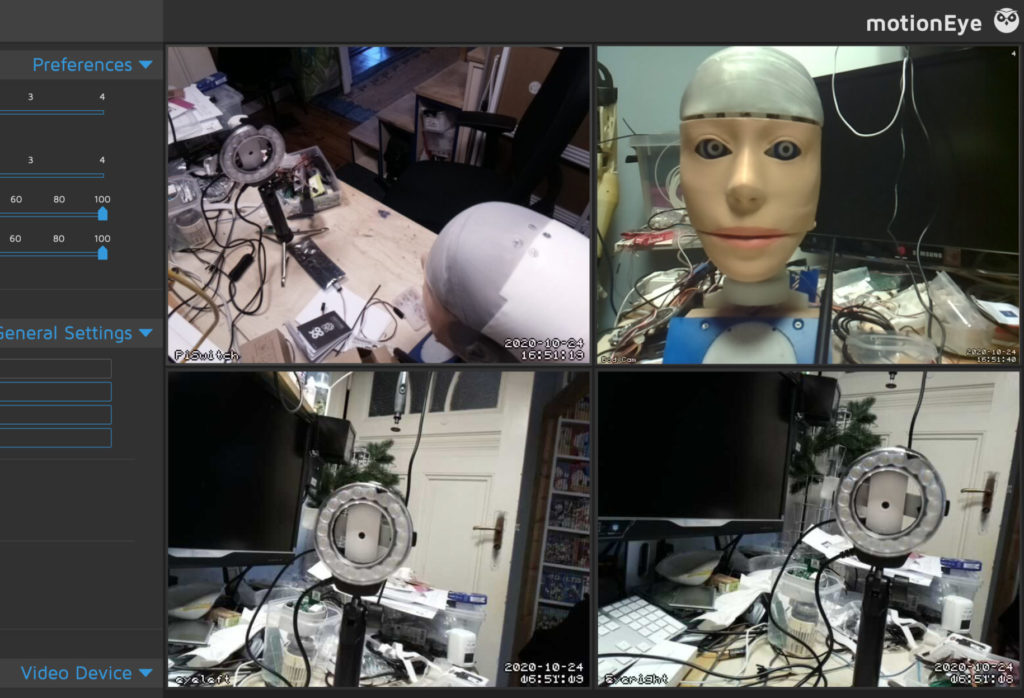
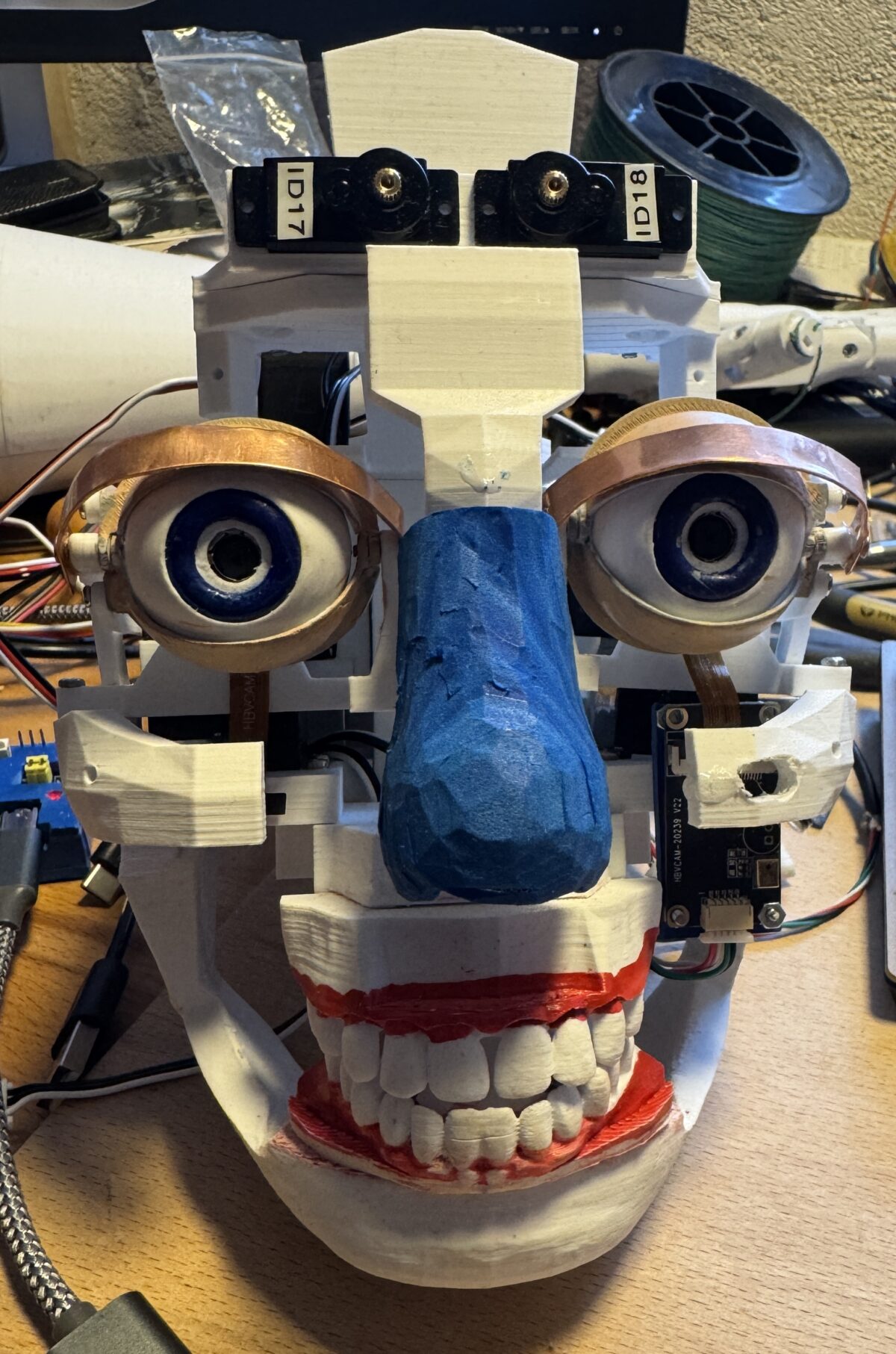
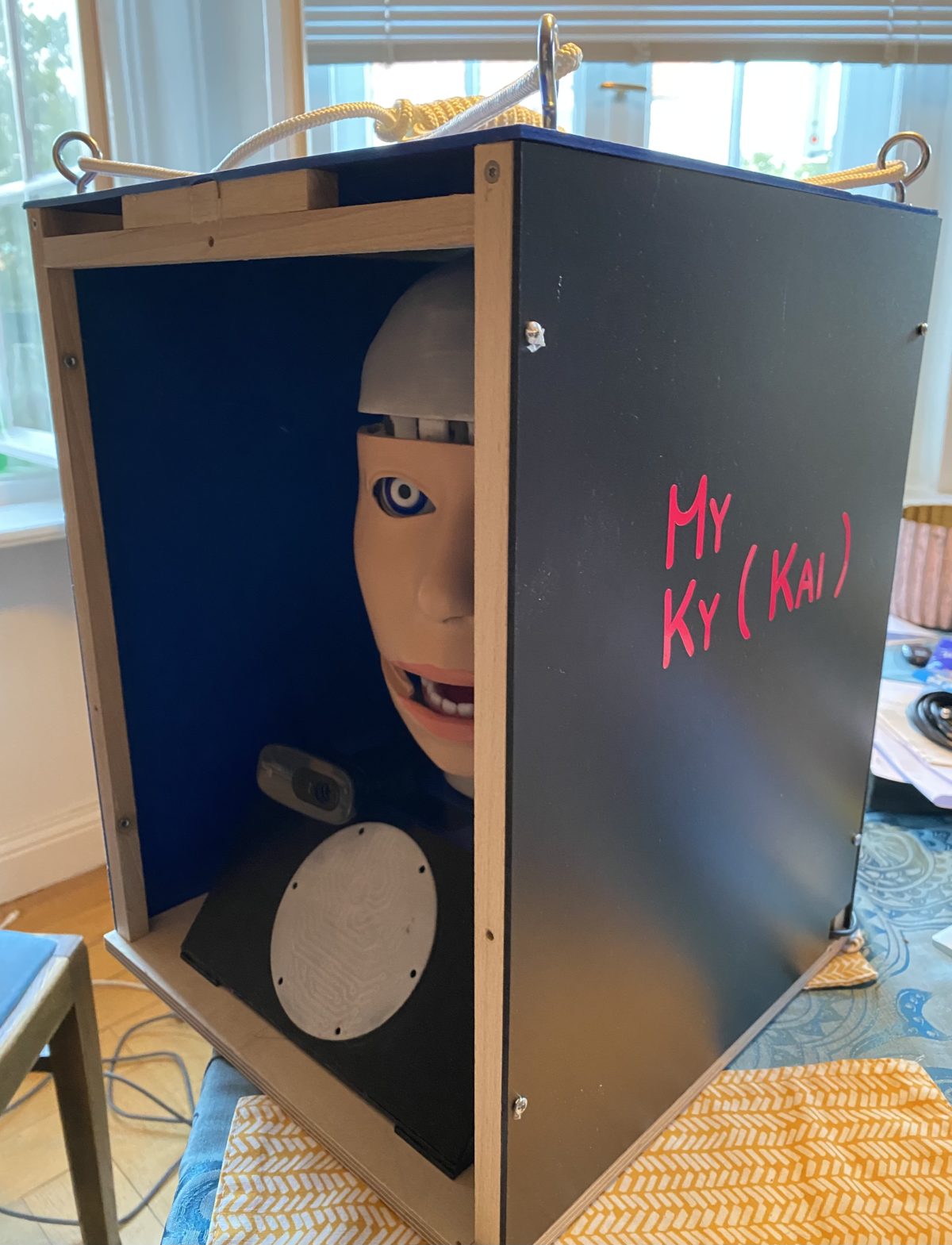
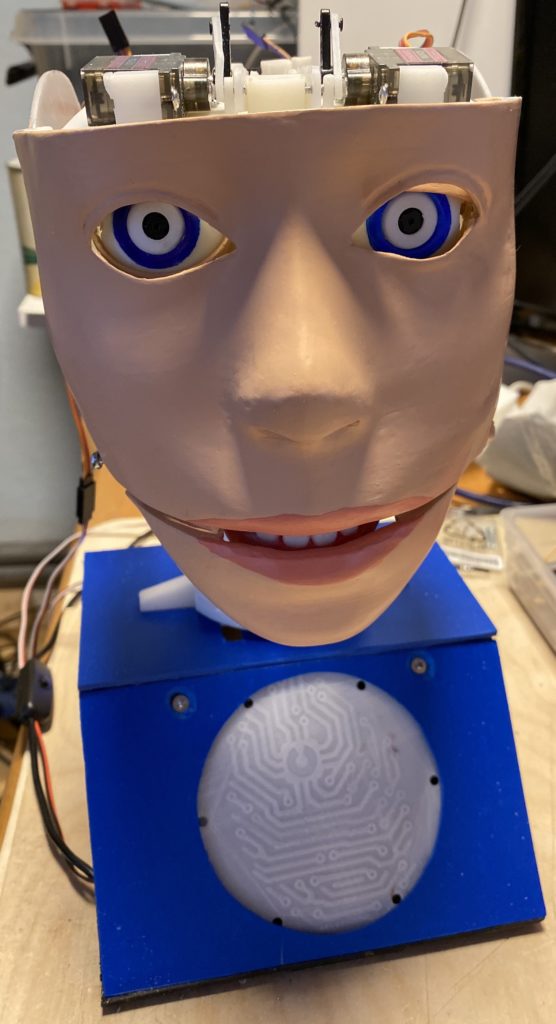
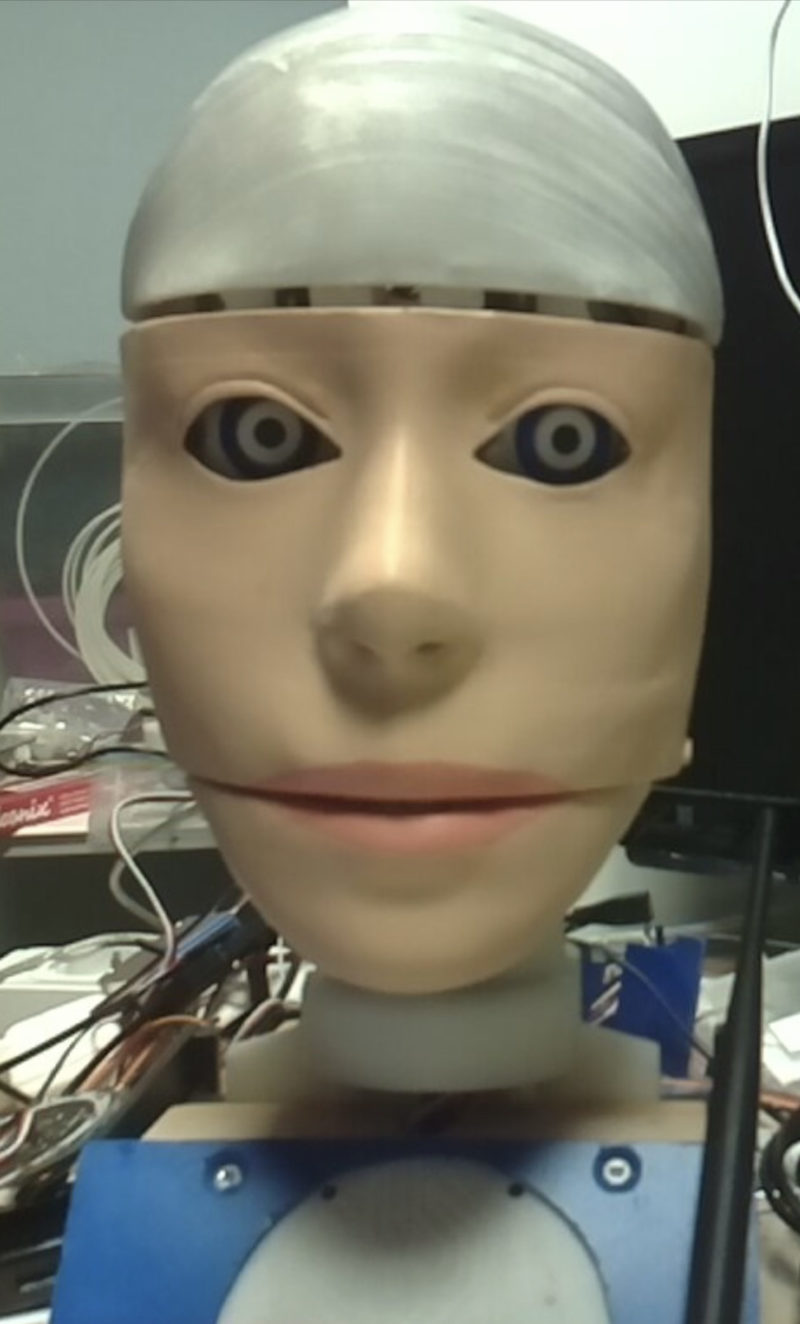
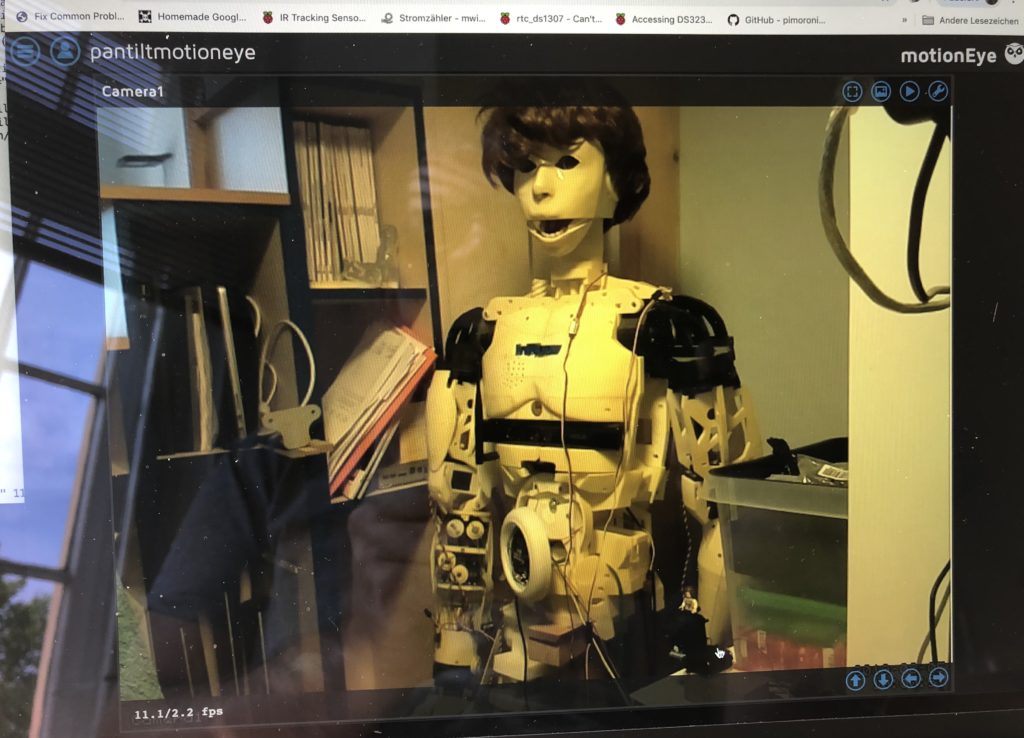
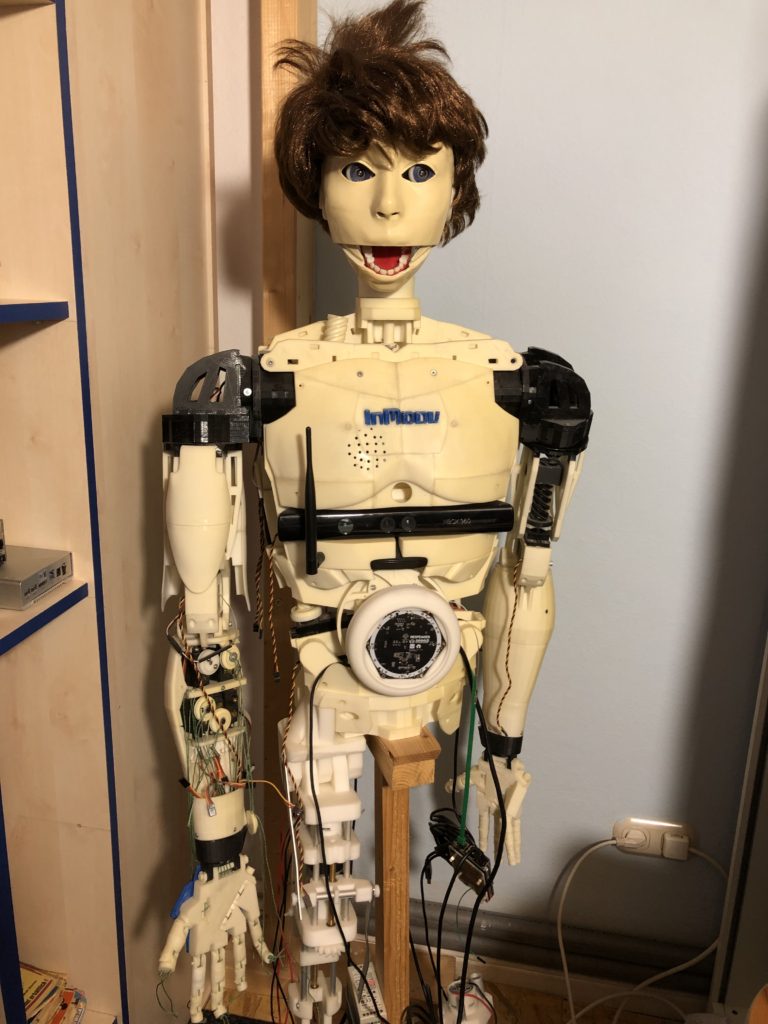
Die Augenkameras zeigen die Lampe die vom Server bei Dunkelheit angeschaltet werden kann
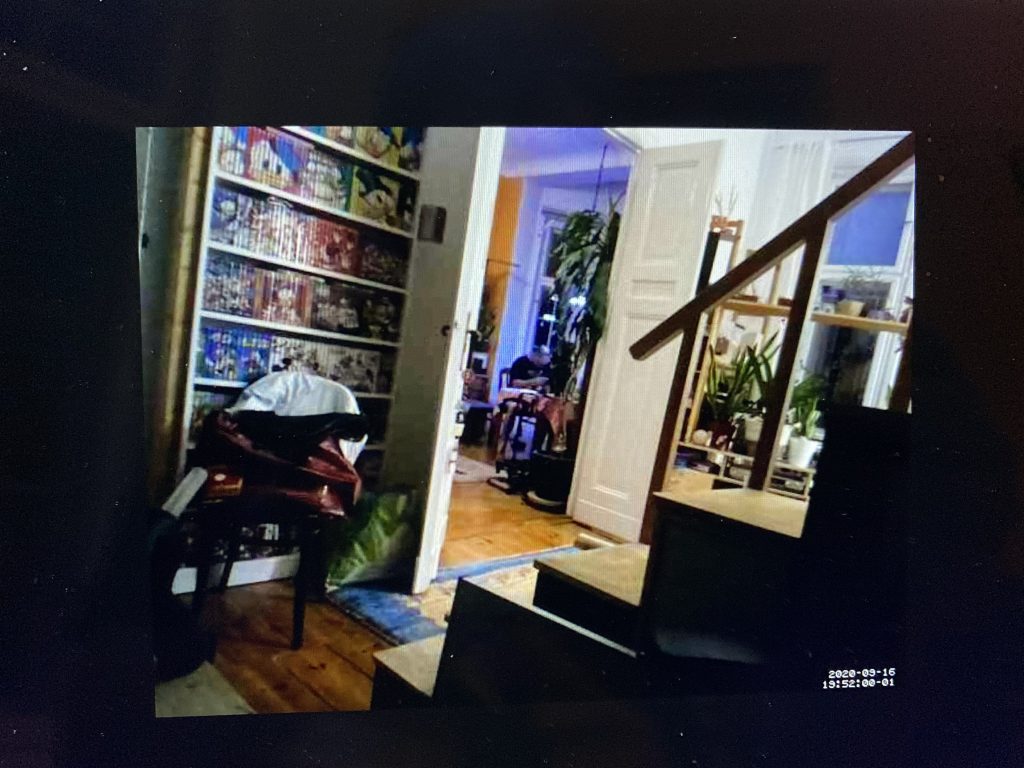
Im oberen Bild sieht man rechts oben die Werkstattkamera links oben der Blick auf den Kopf von der BodyCam.
Unten rechts ist die rechte Augenkamera unten links die linke Augenkamera


Das ganze mit einem USB-Stick Multimeter gemessen und zeigt den Stromverbrauch des Kopfes
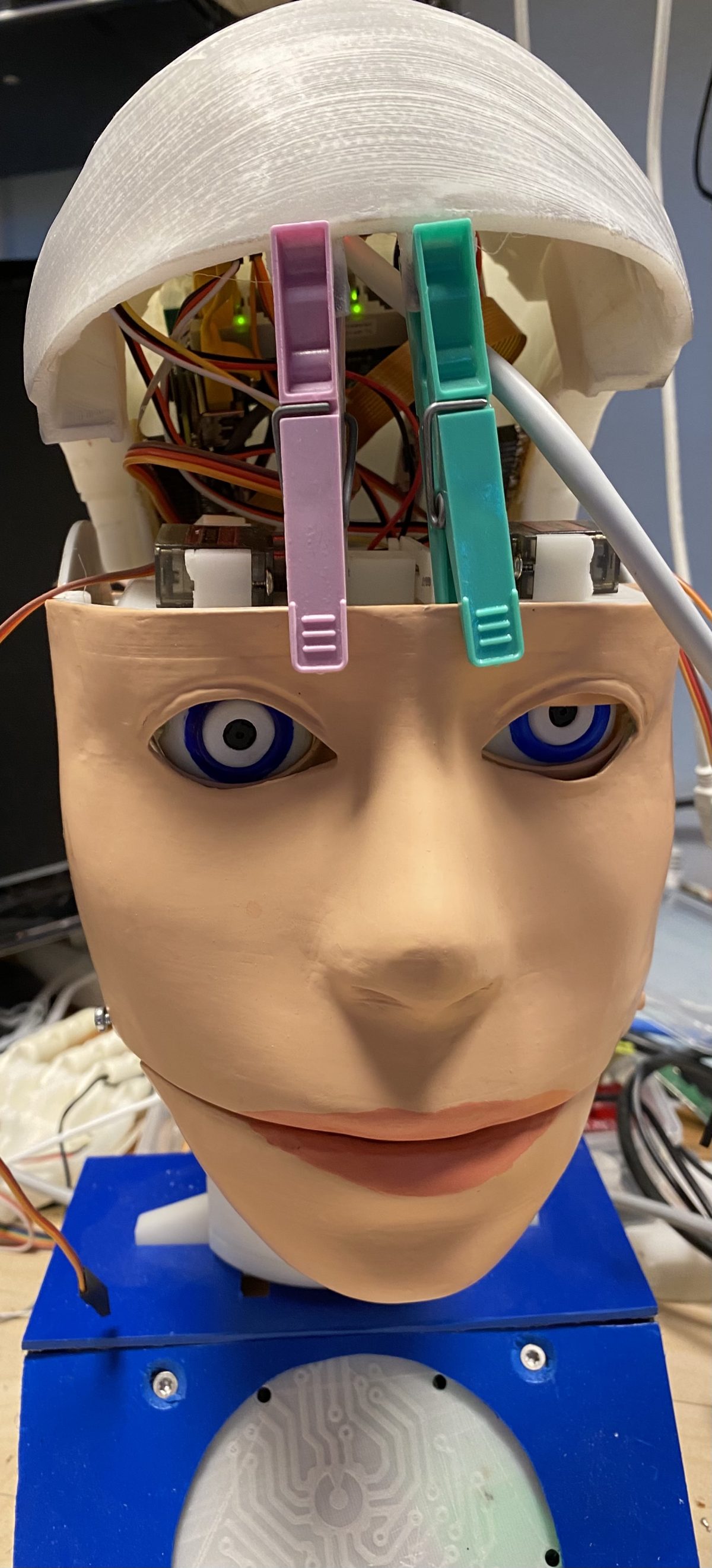
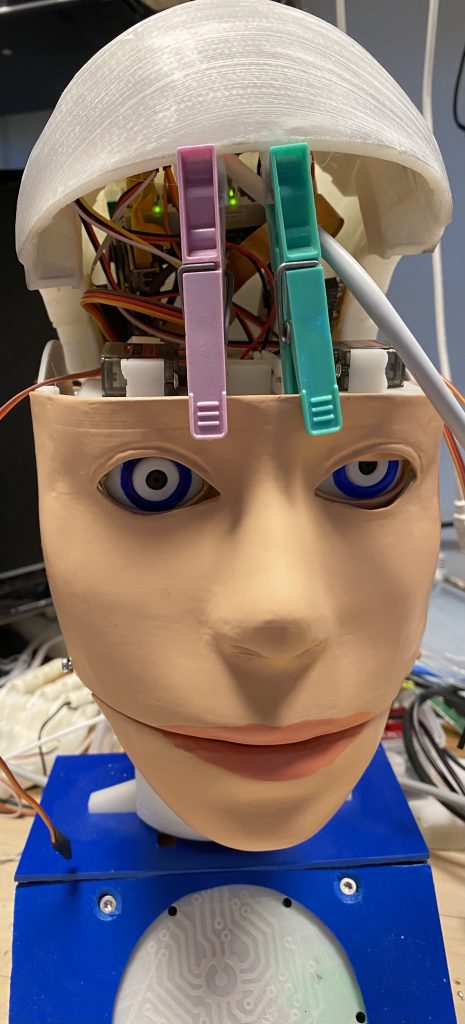

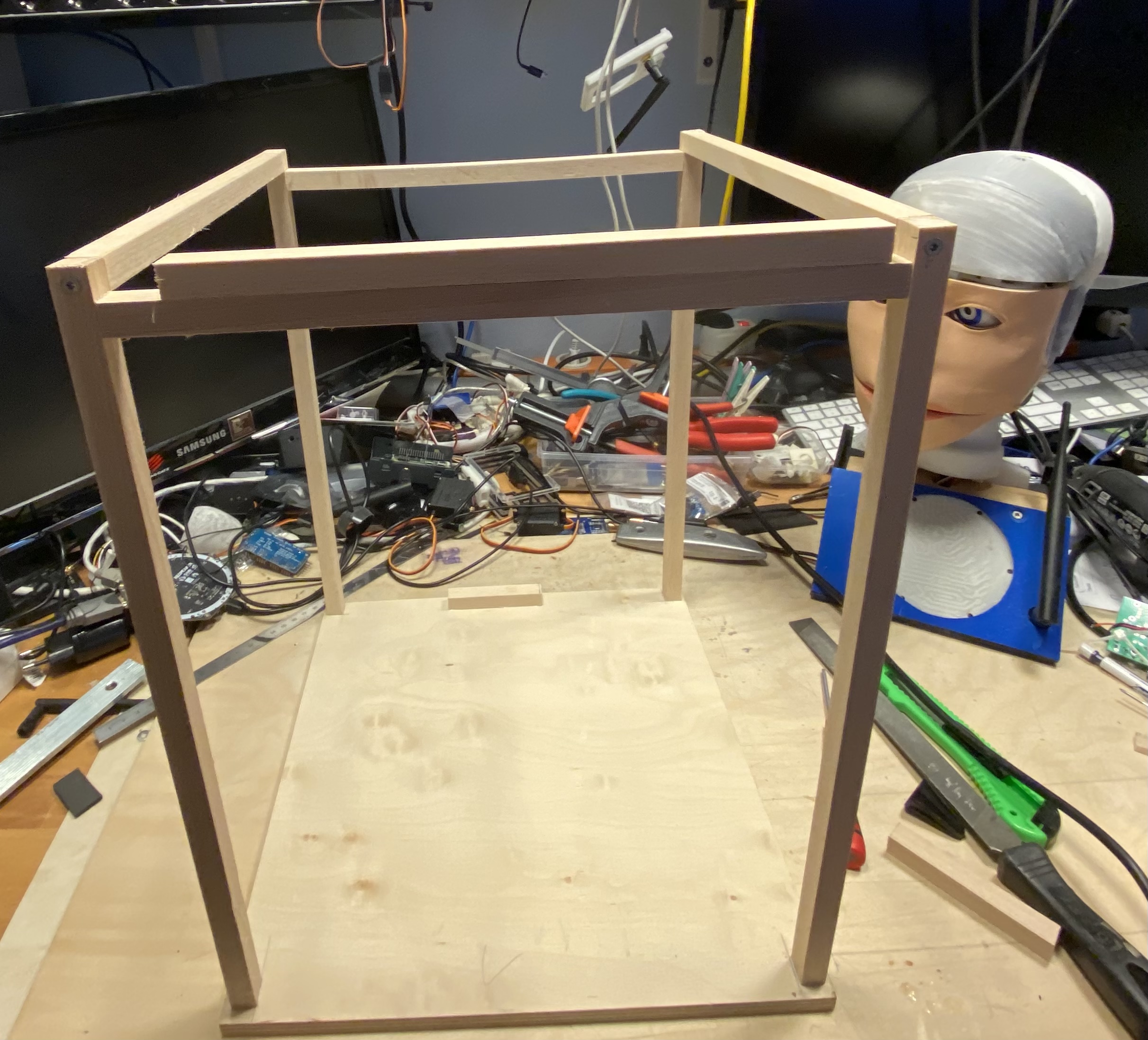
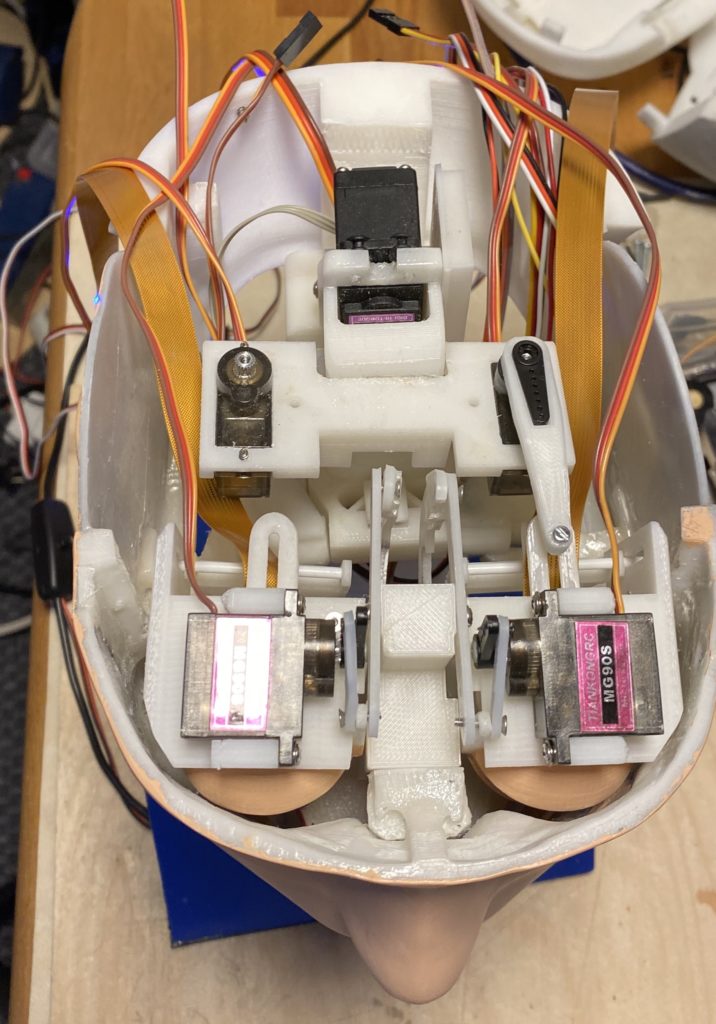
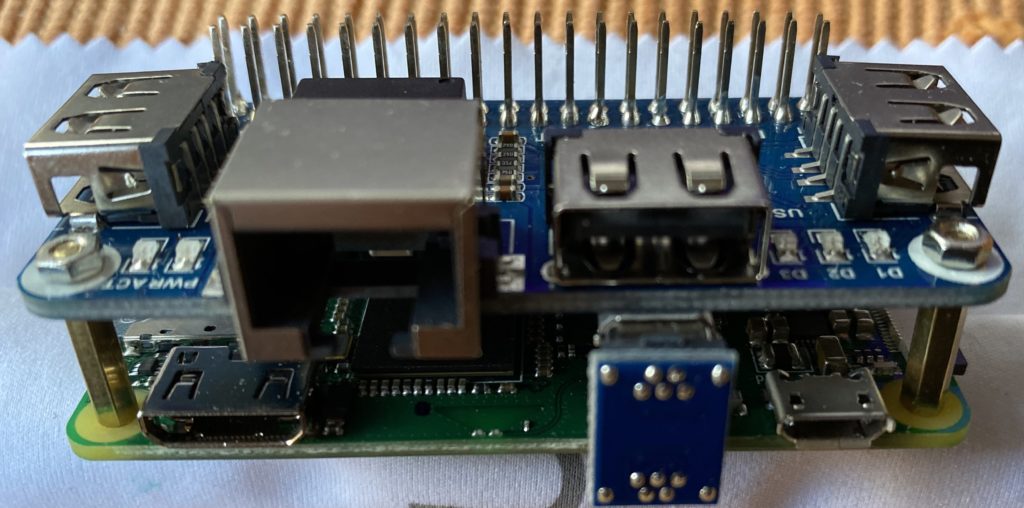
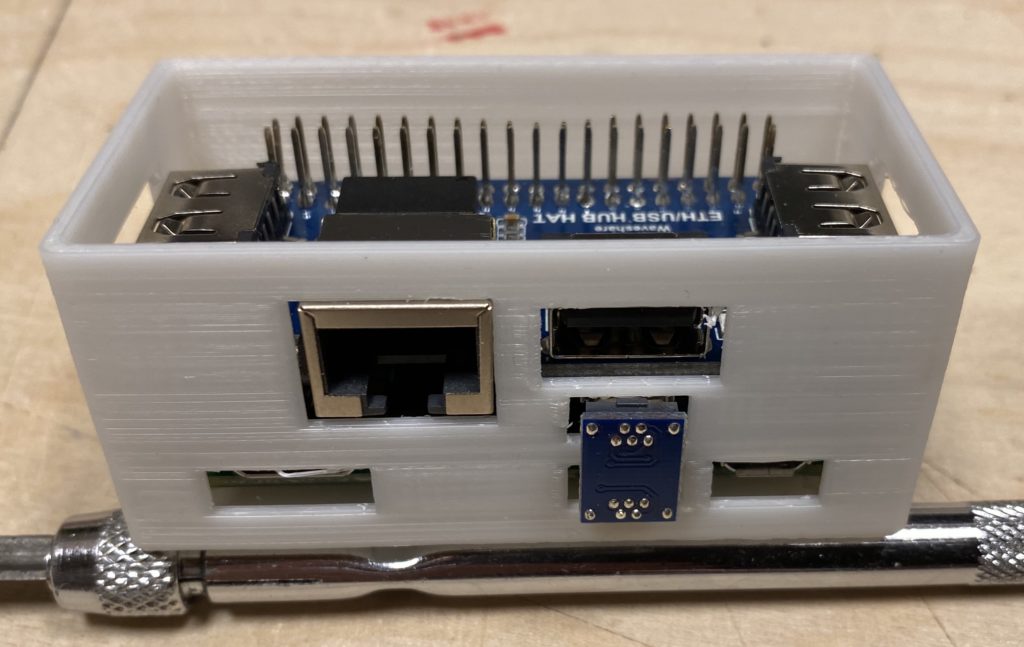
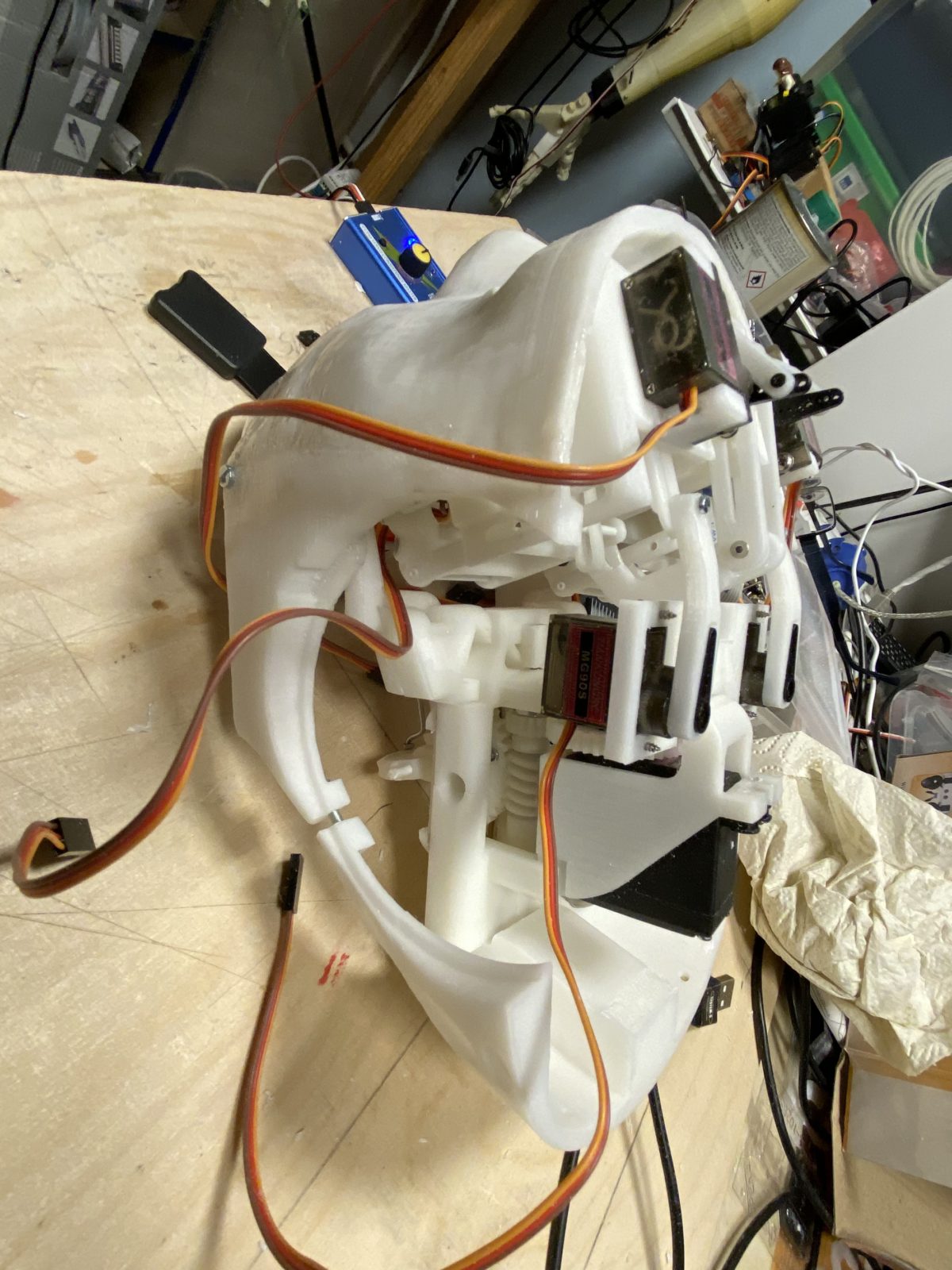
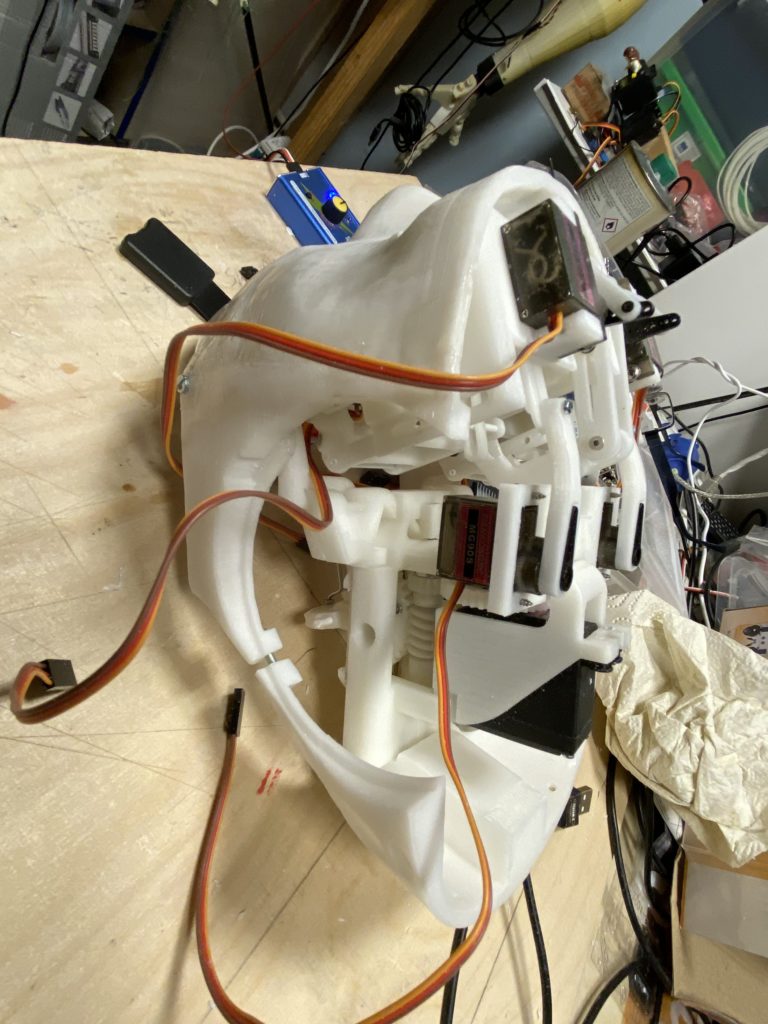
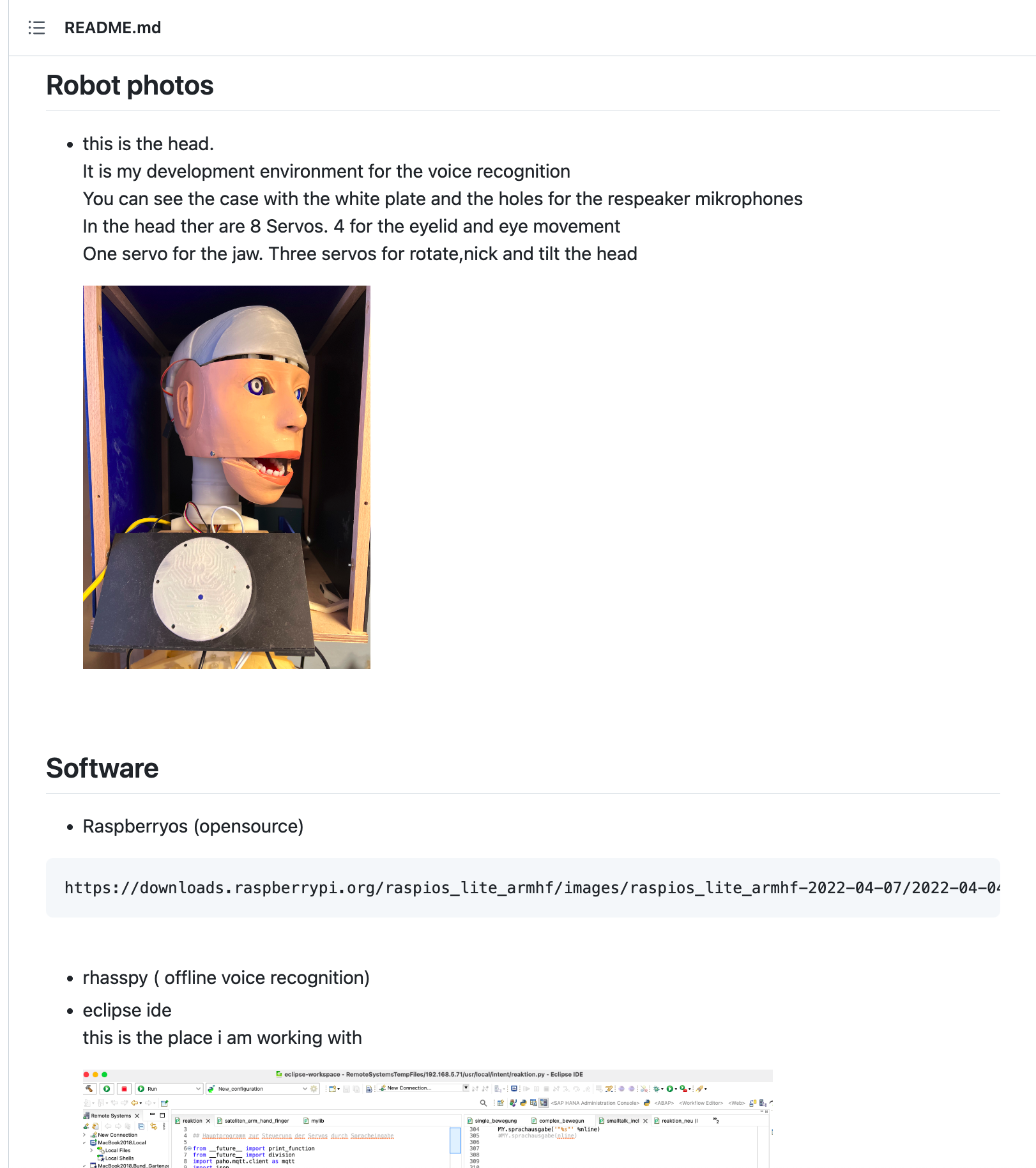
Im inneren des Kopfes werkeln 2 Raspberry Pi zero + USB to Ethernet adapter + 5-Fach Switch. Auf den RpI’s läuft motion um die Augenkameras als Stream zur Verfügung zu stellen.


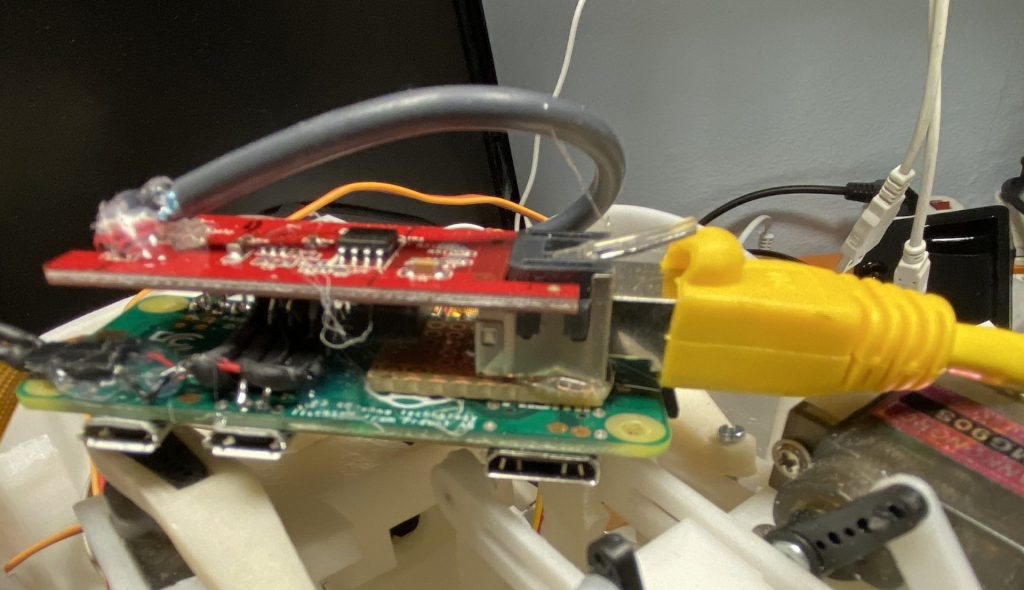
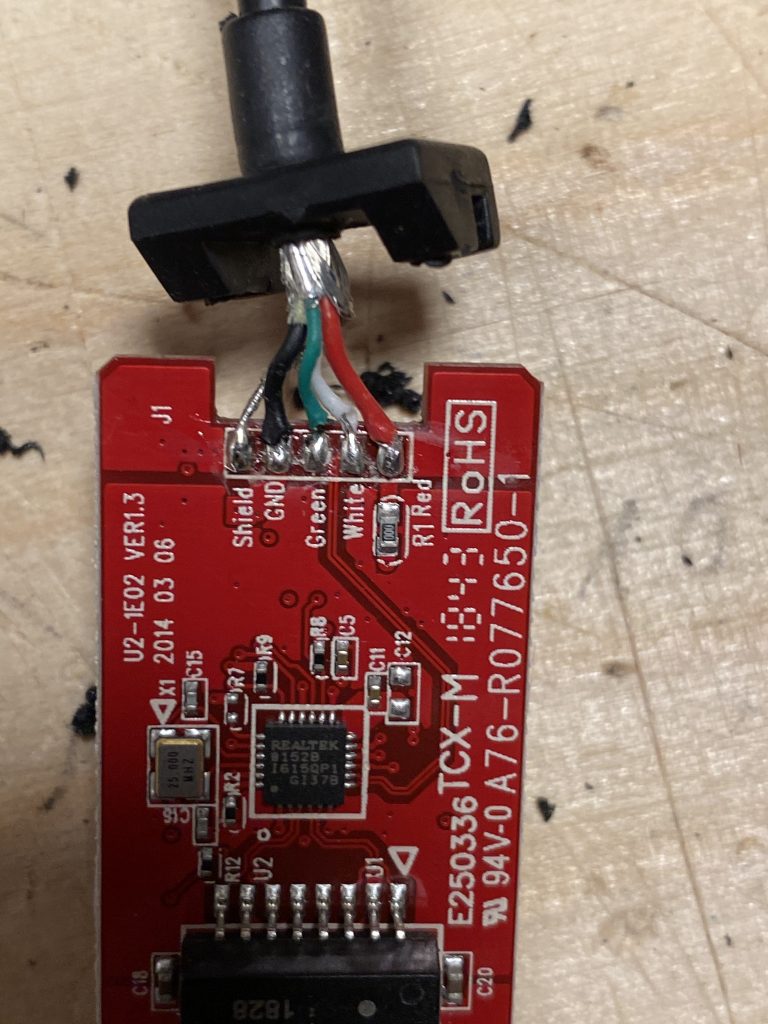
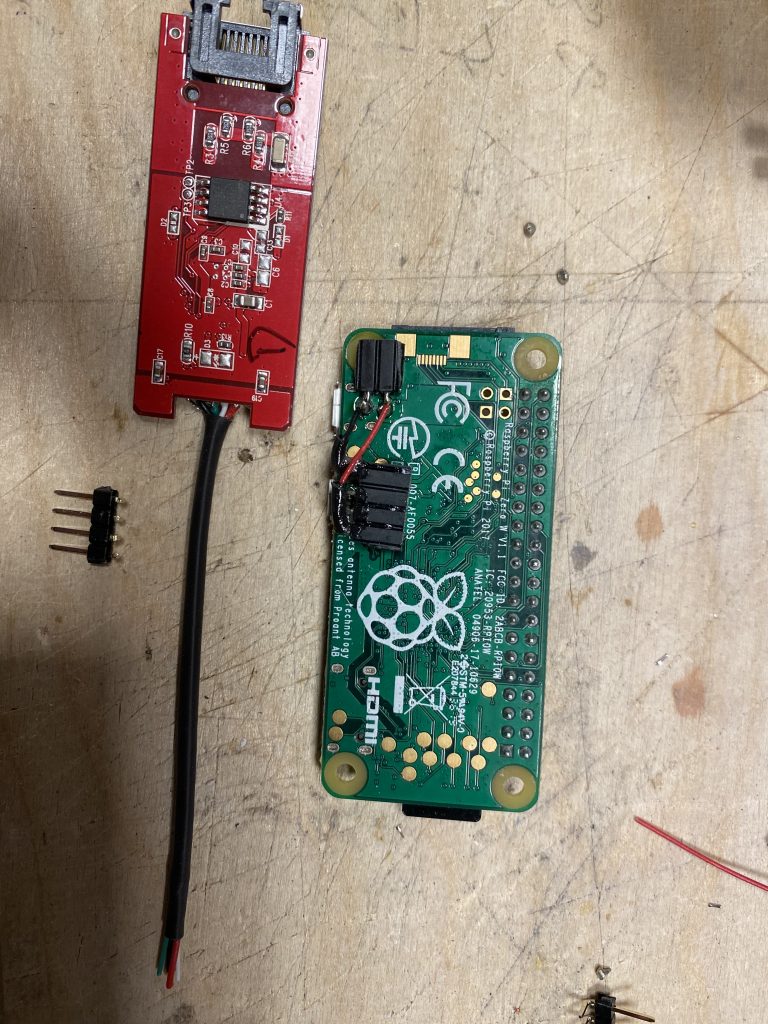
Ich habe einen USB zu Ethernet Adapter aufgesägt und die Platine auf den Raspberry Pi zero geklebt. Die USB Anschlüsse habe ich direkt auf die Platine gelötet, da die Stecker an der Seite zuviel Platz wegnehmen.
Auf dem Raspberry pi zero läuft Buster mit motion für die Camera



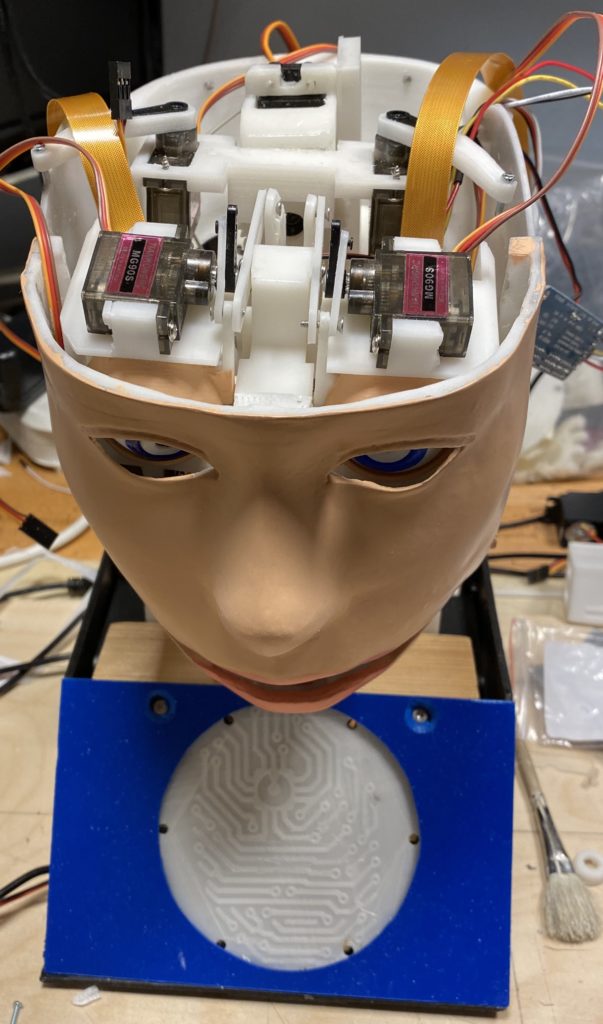
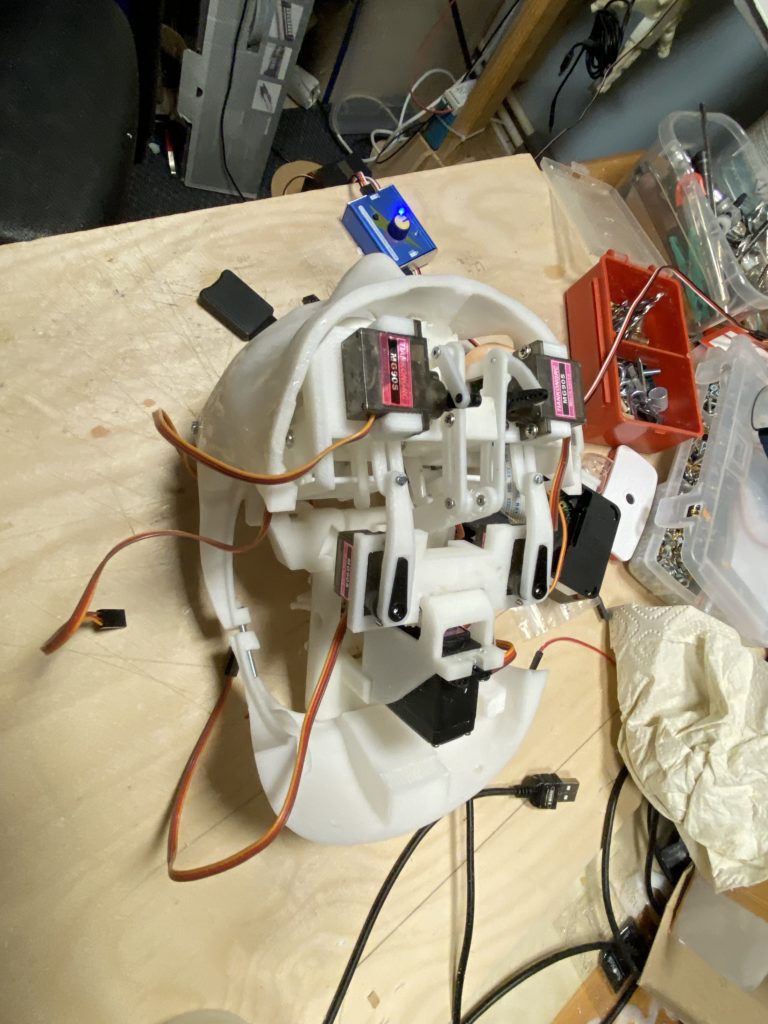
Auf dem rechten Bild sieht man die Flachbandkabel der Raspberry Pi Cam’s herausschauen













Ja demnächst nach dem die Teile in der Drehbank angepasst sind mehr



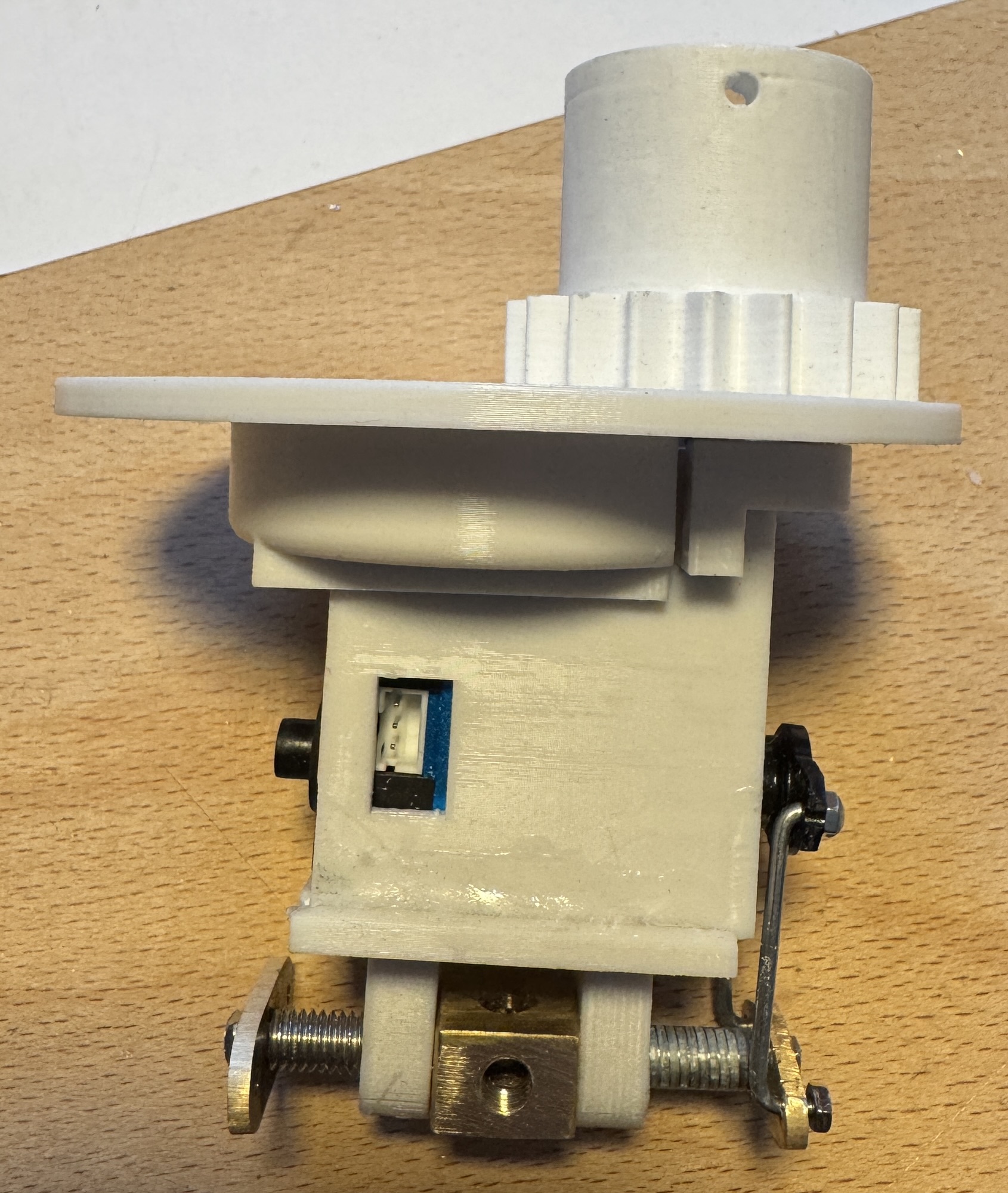
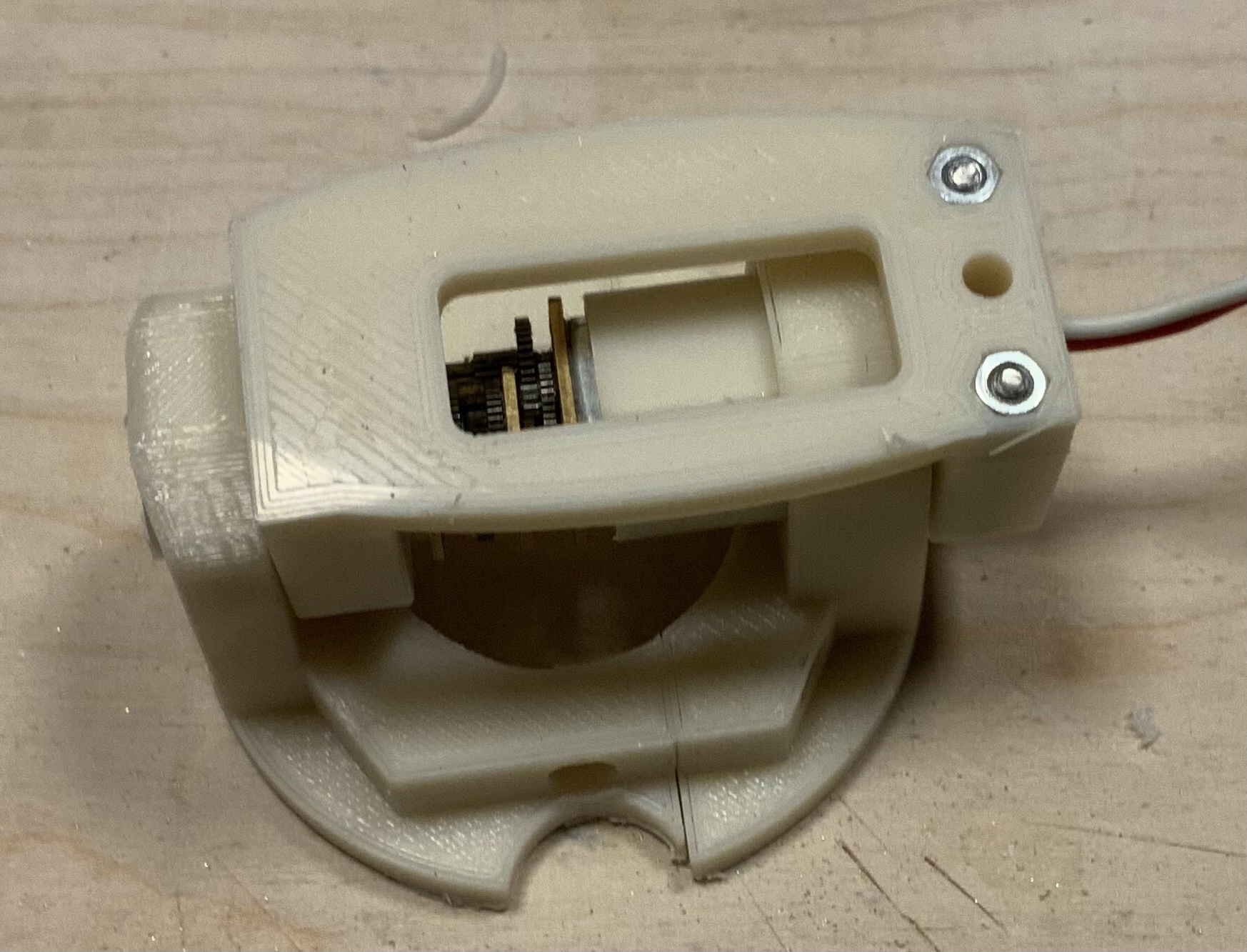
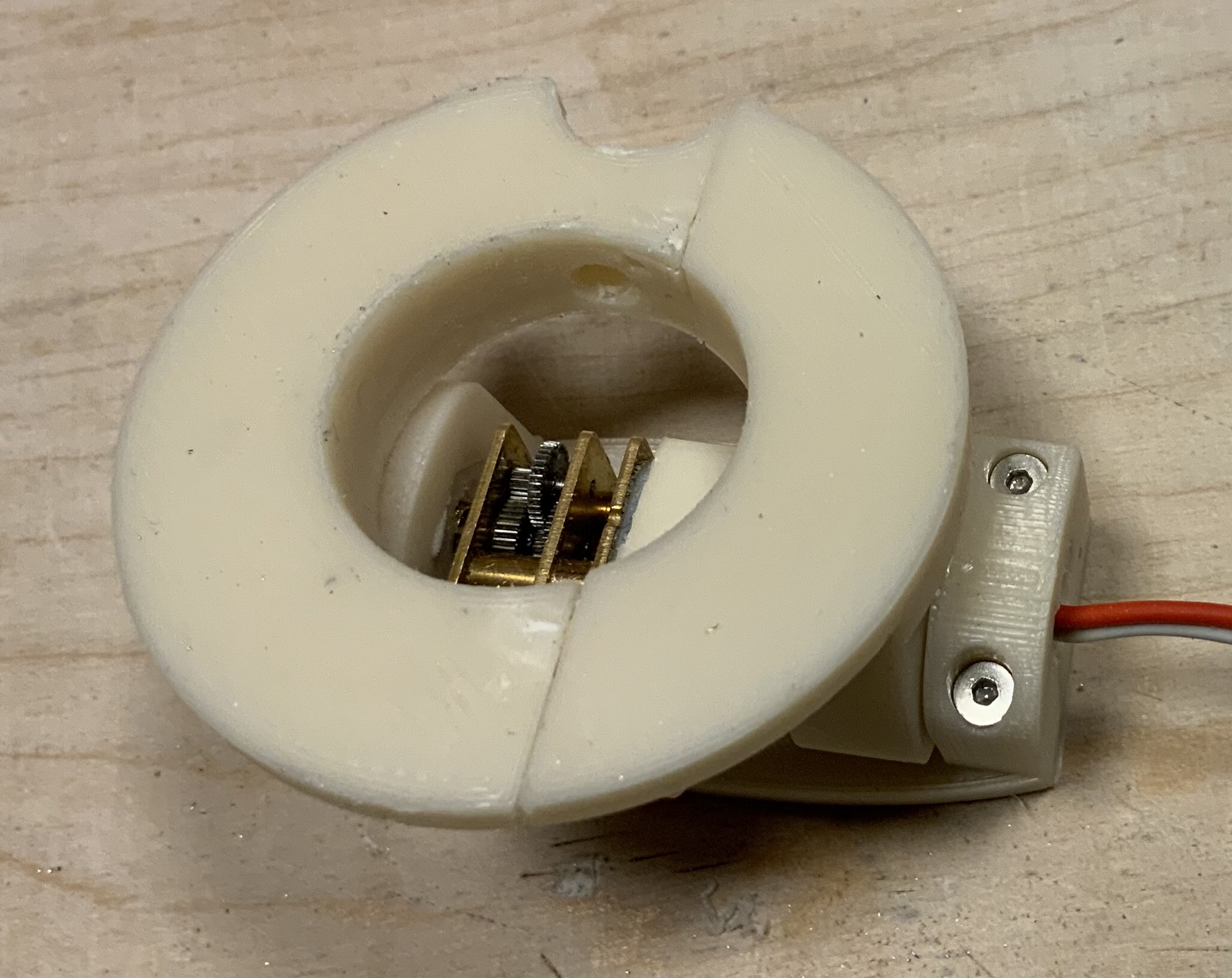
Beim neuen Hals läuft die Mechanik ohne größere Reibung
Die neue Version ist optimiert und ich musste keine größeren manuellen Arbeiten daran vornehmen. Leichter ist sie auch





Nur der Wetterbericht wird online geholt




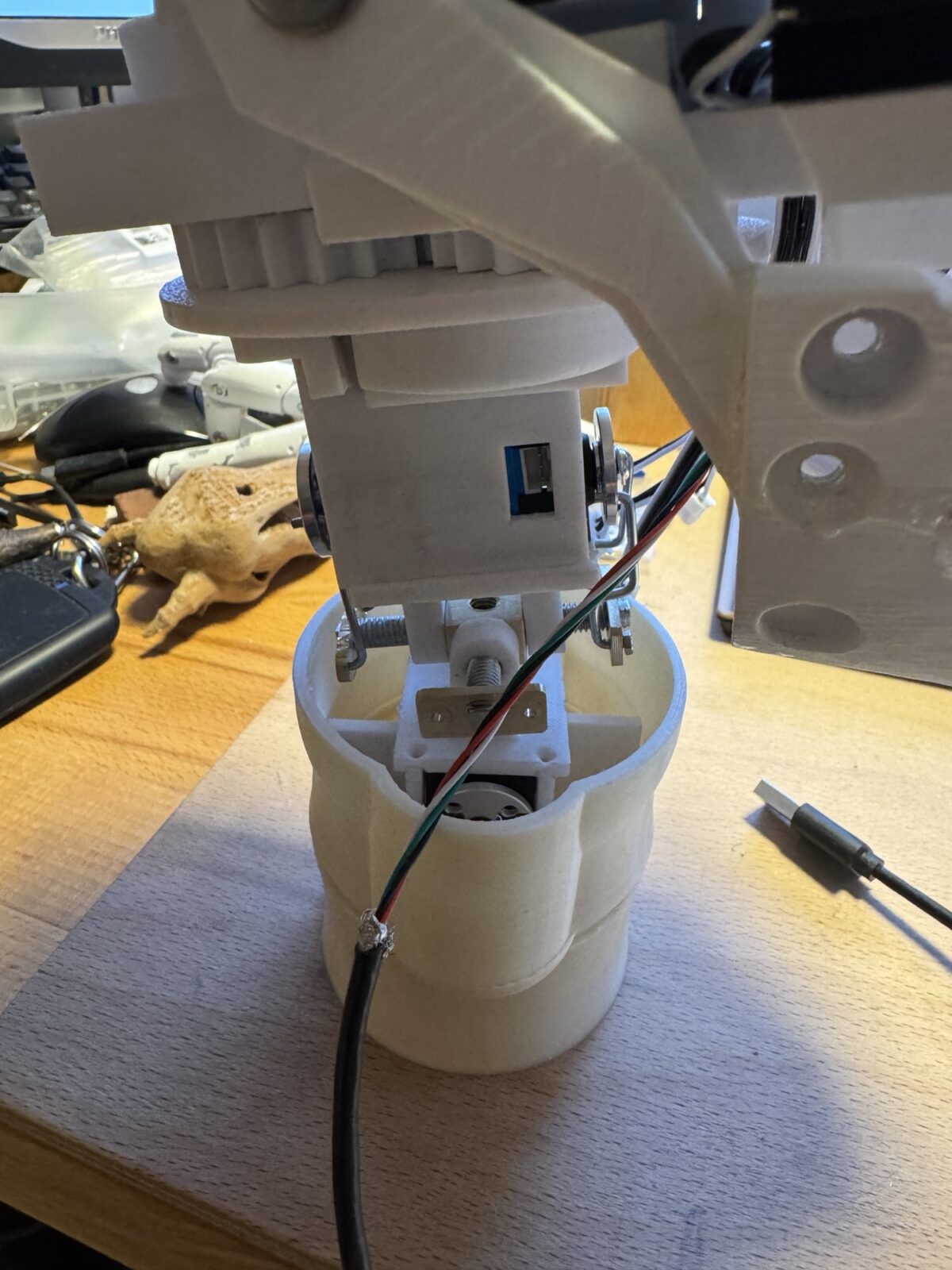
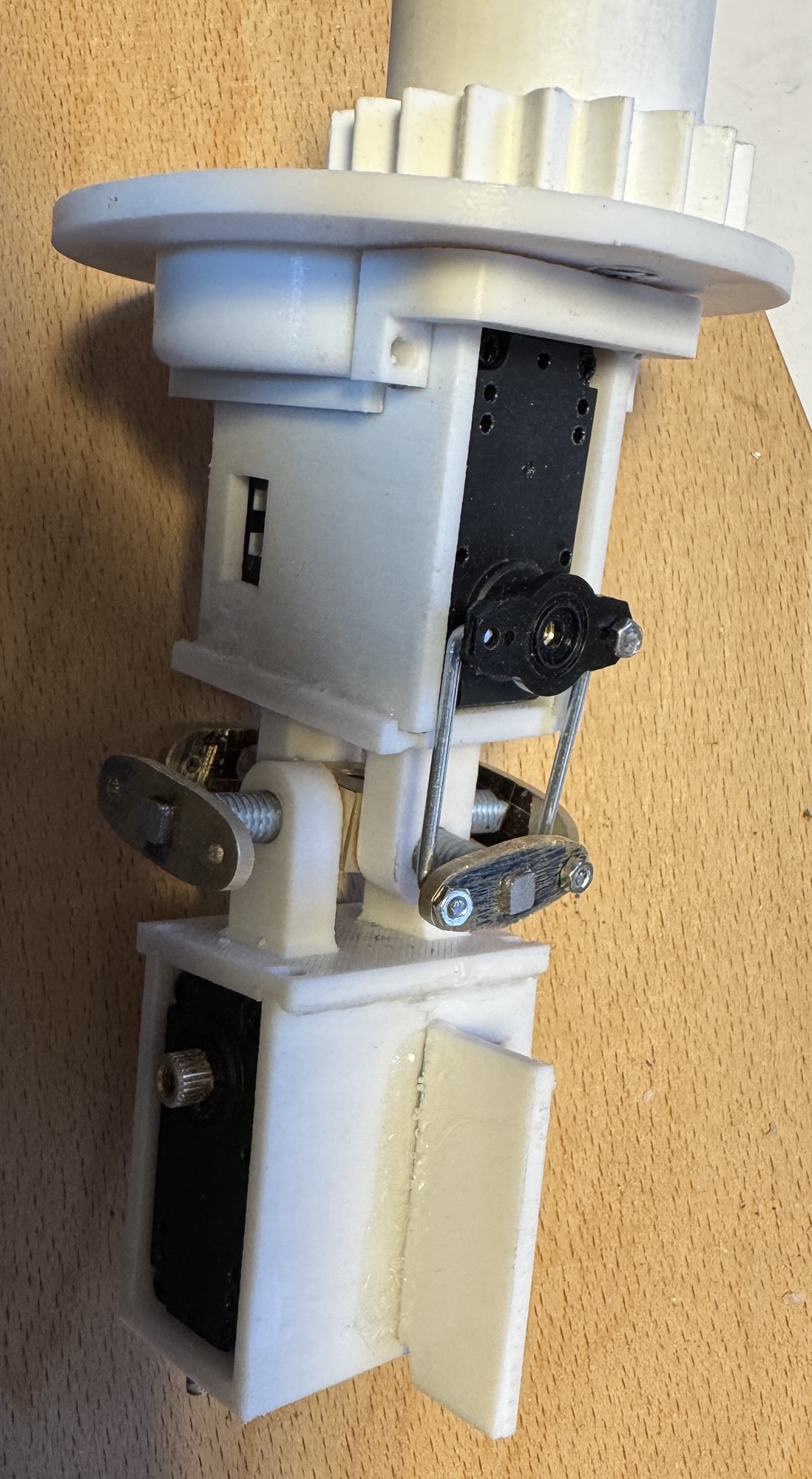
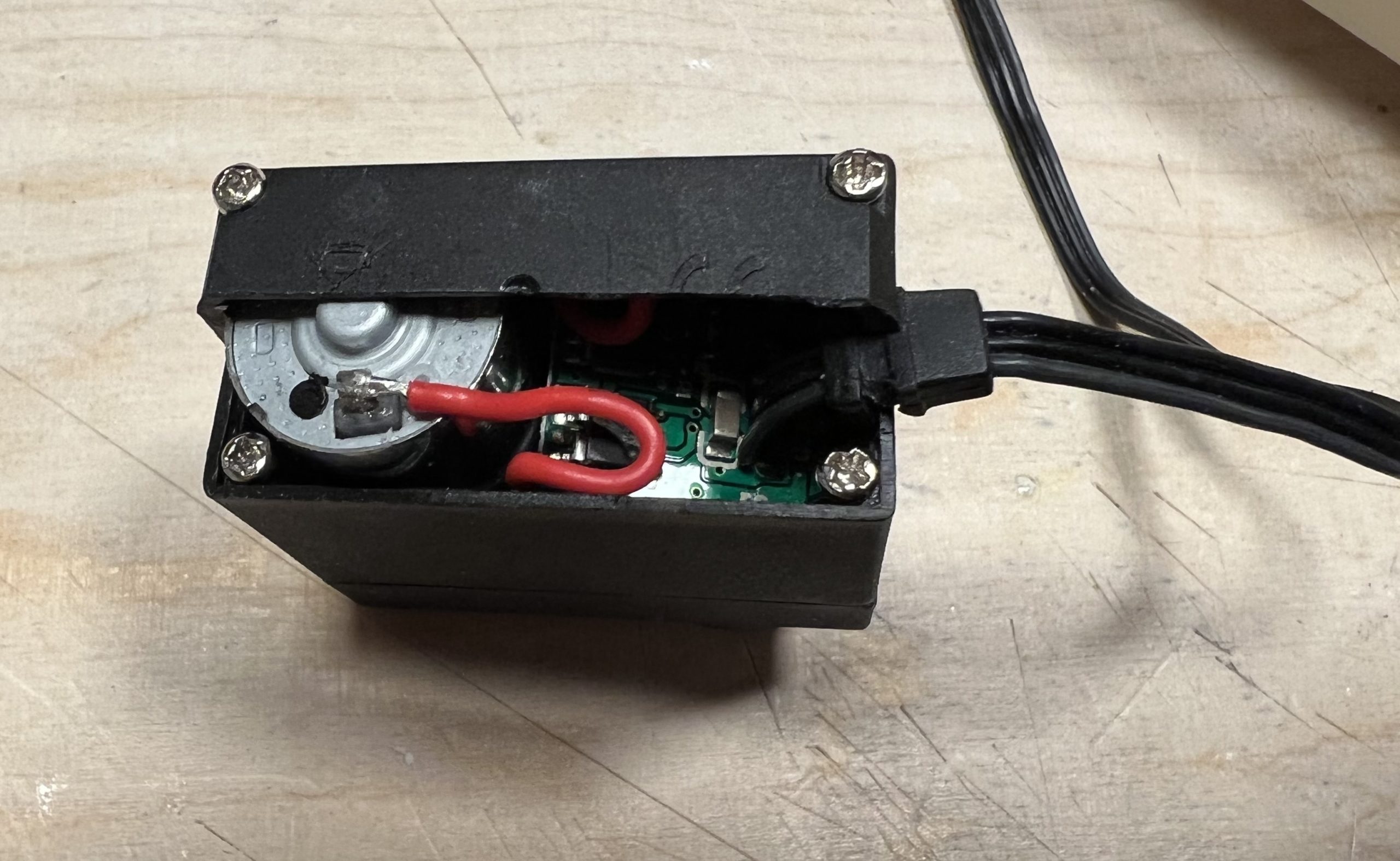
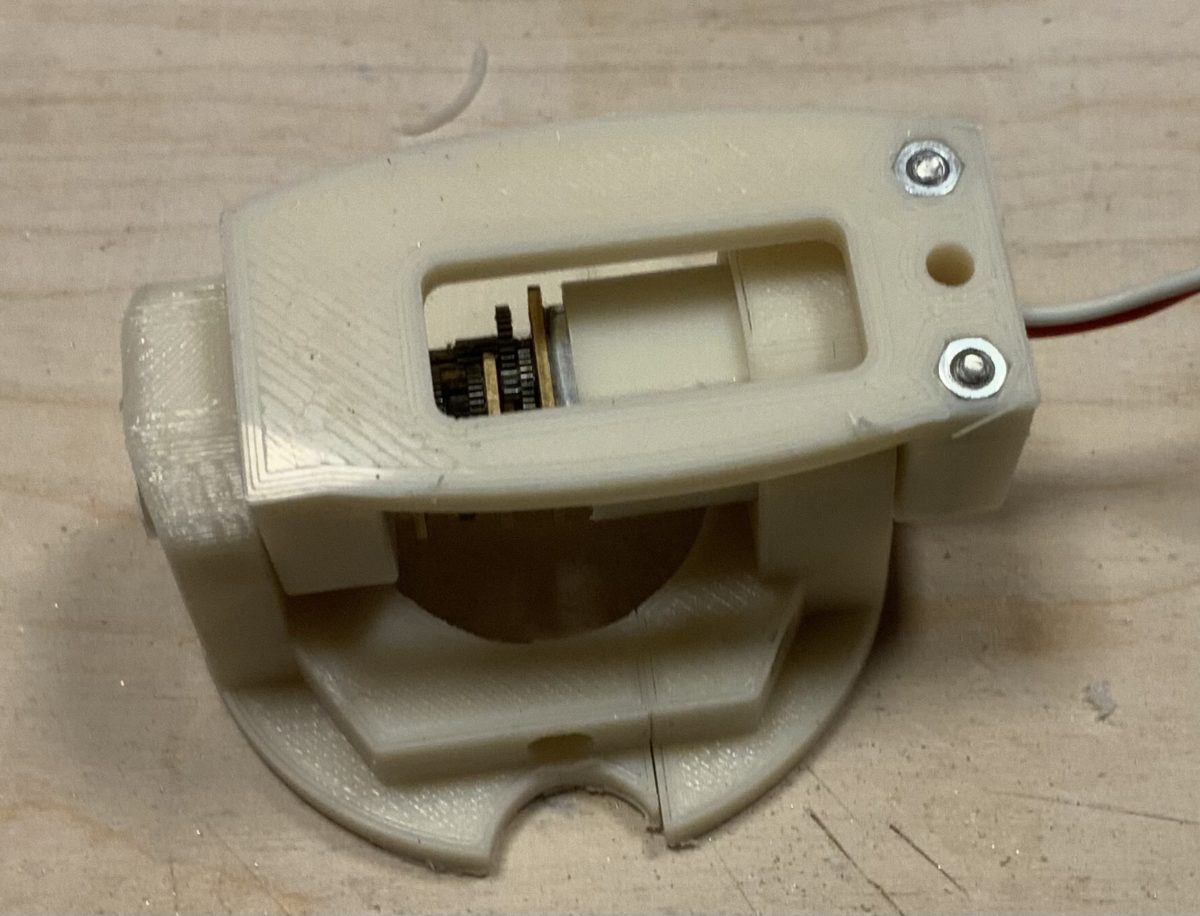
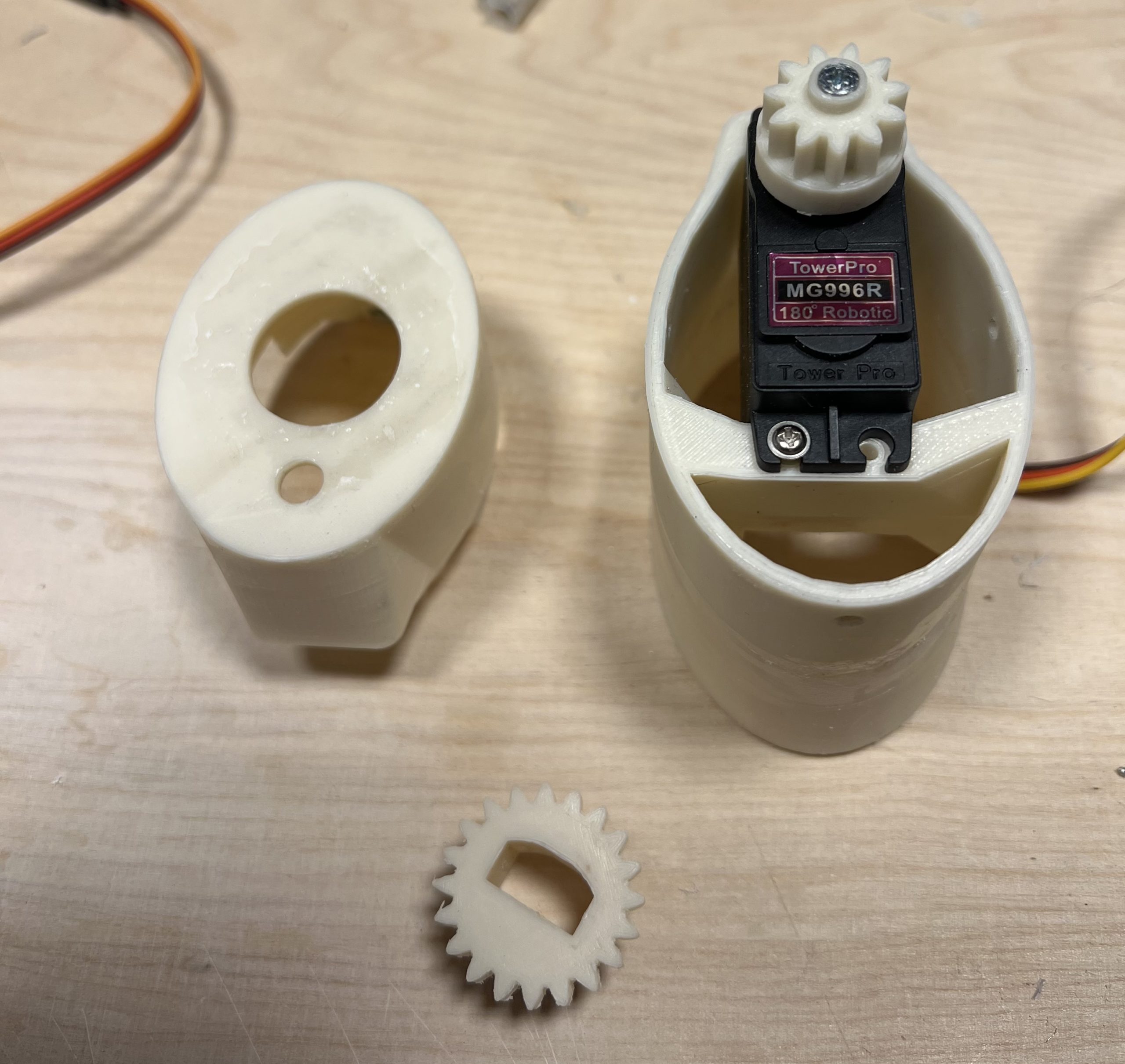
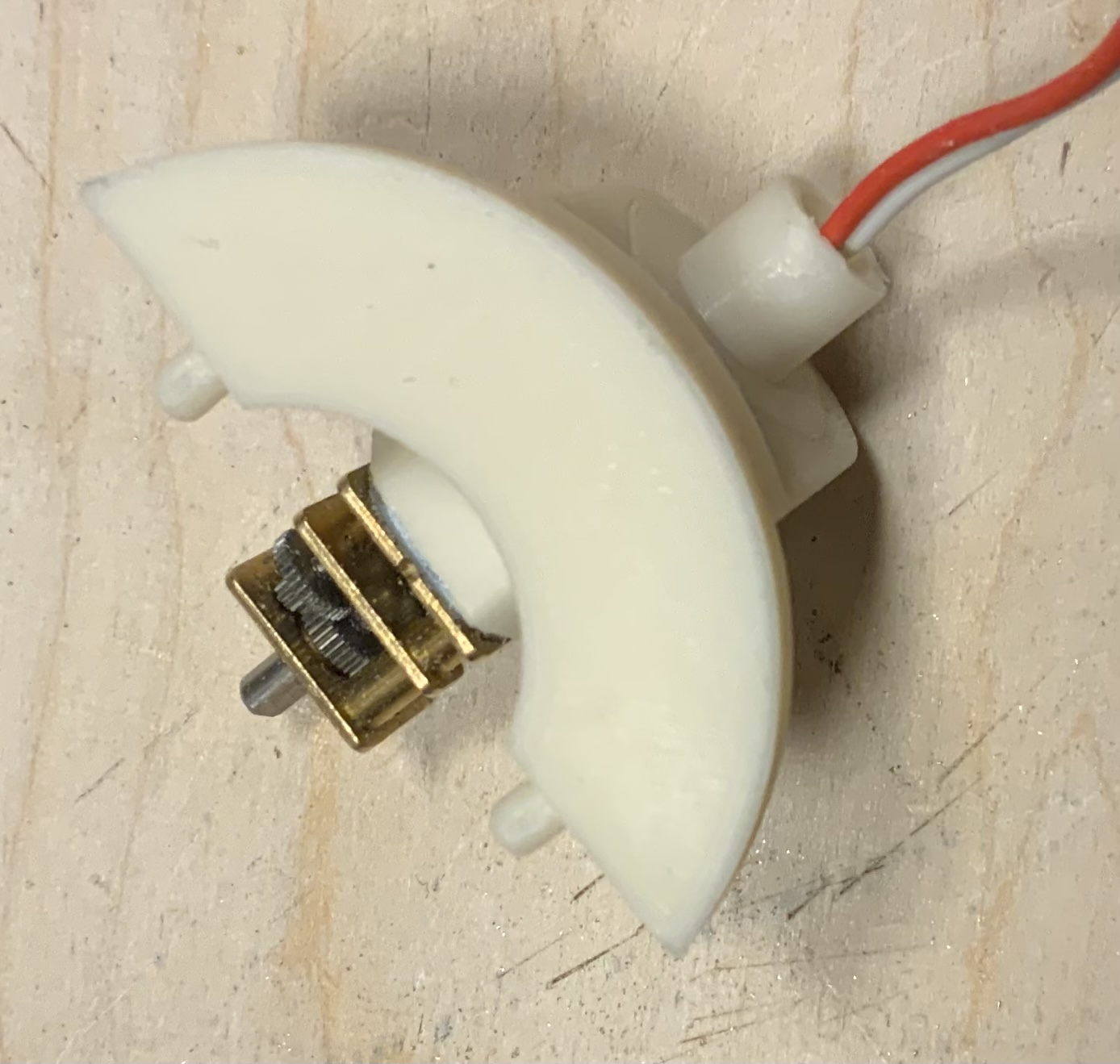
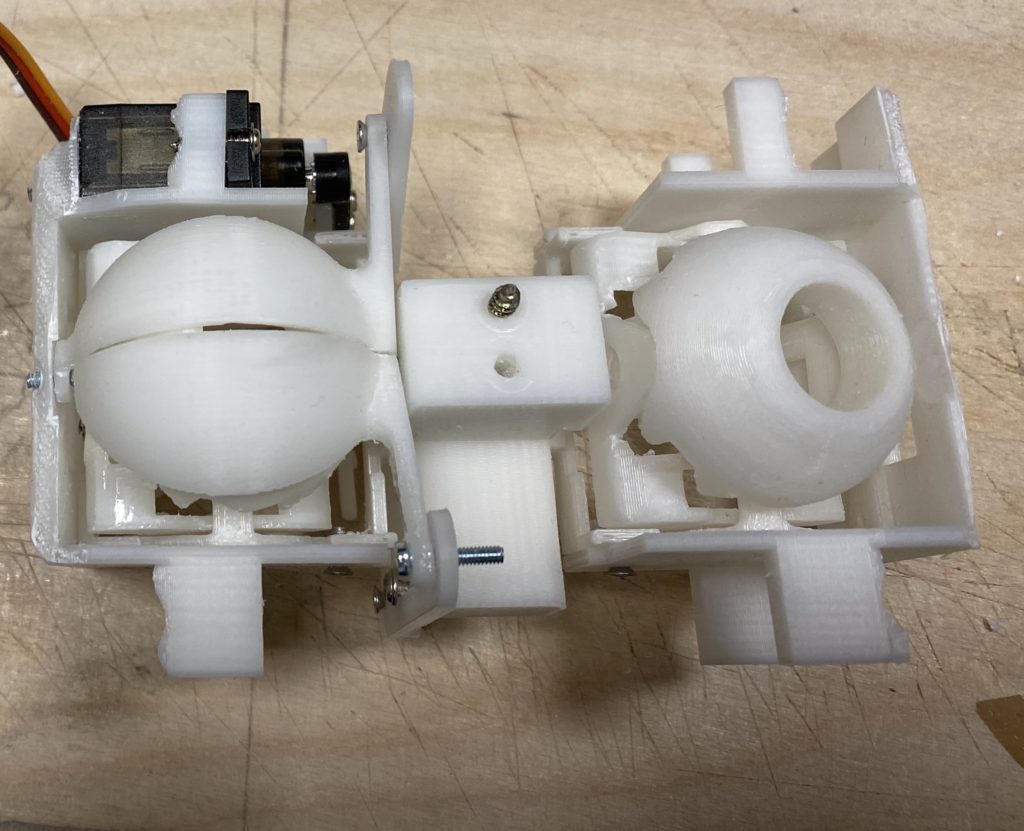
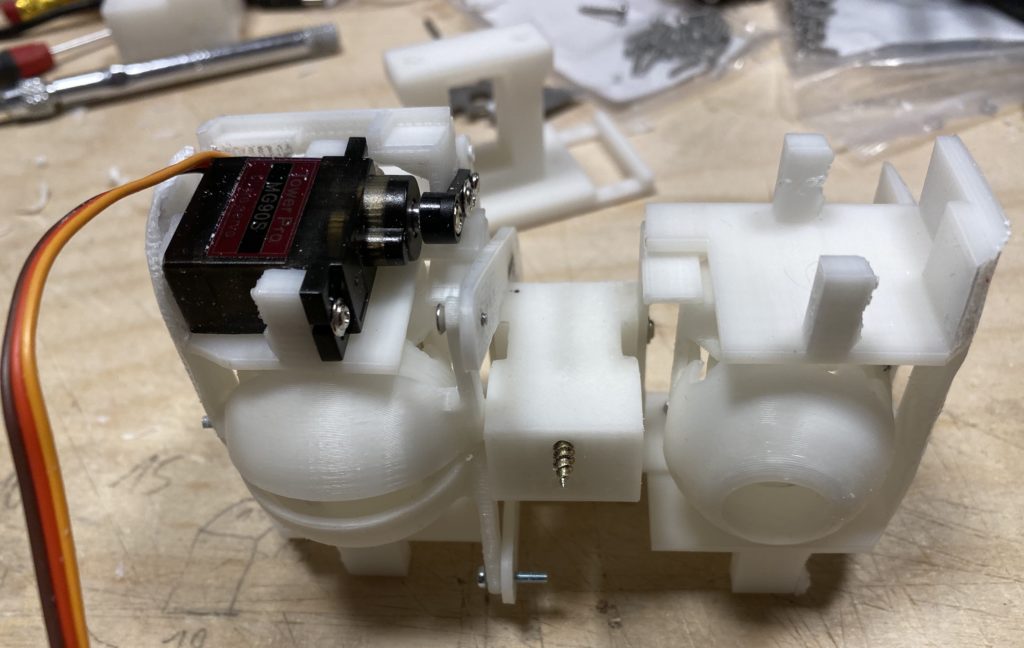
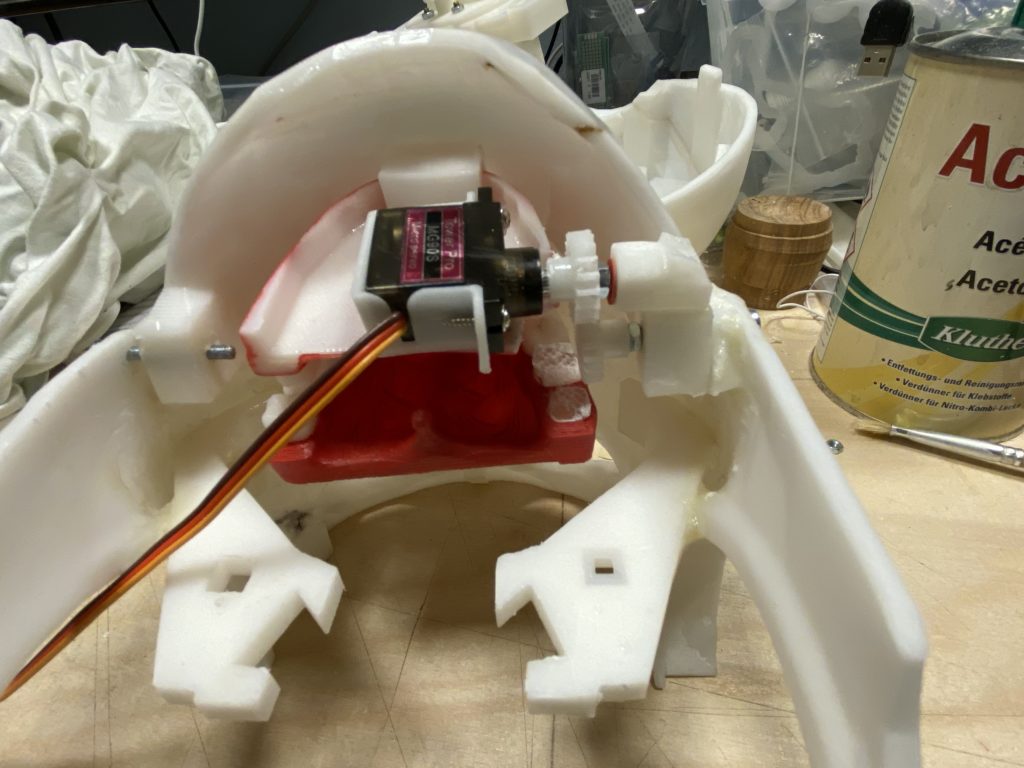
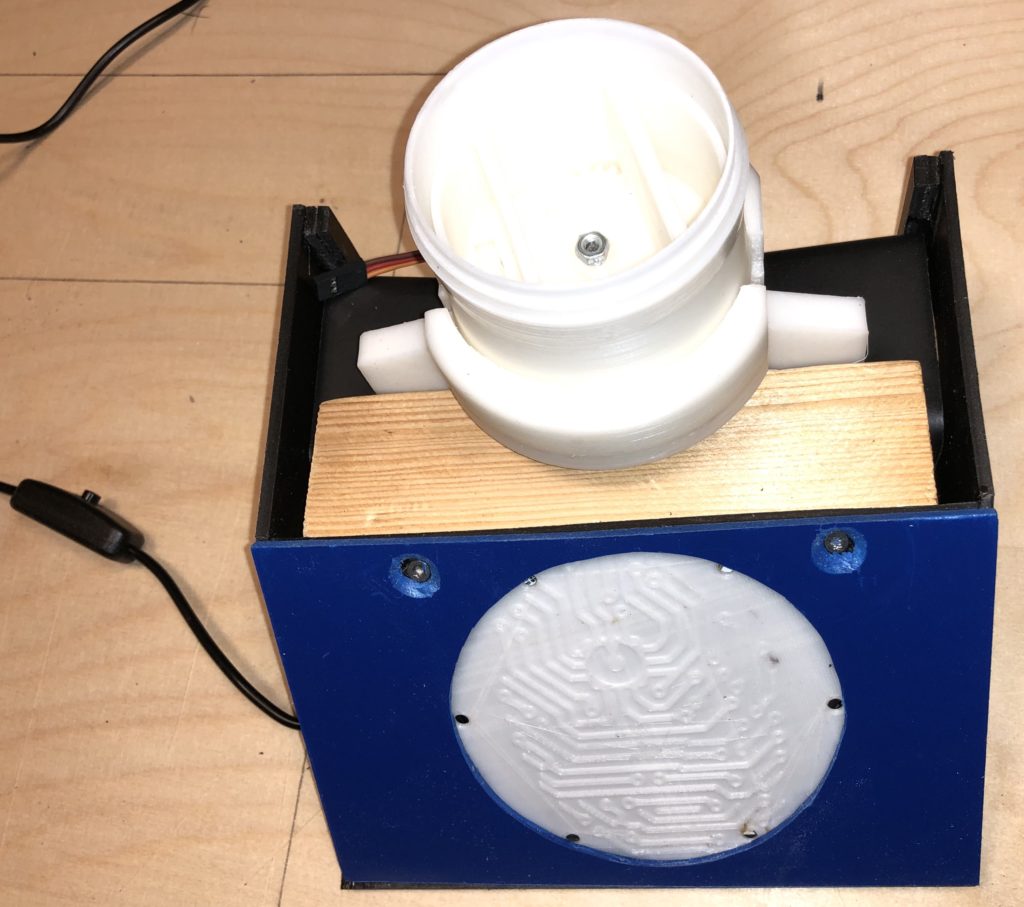
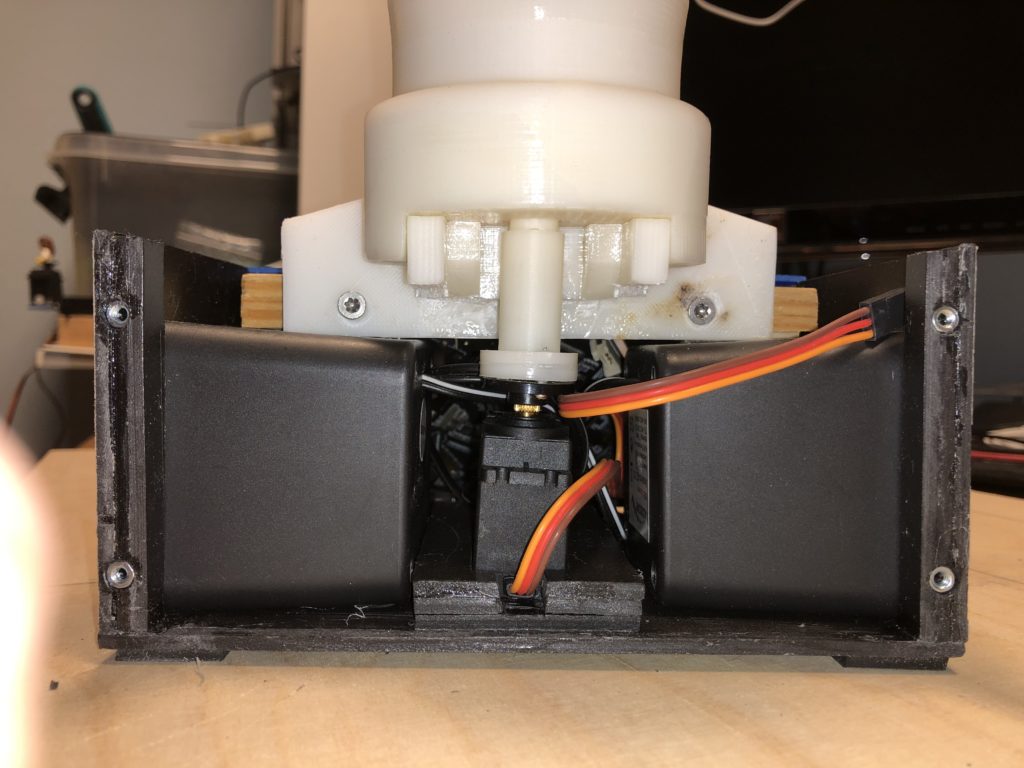
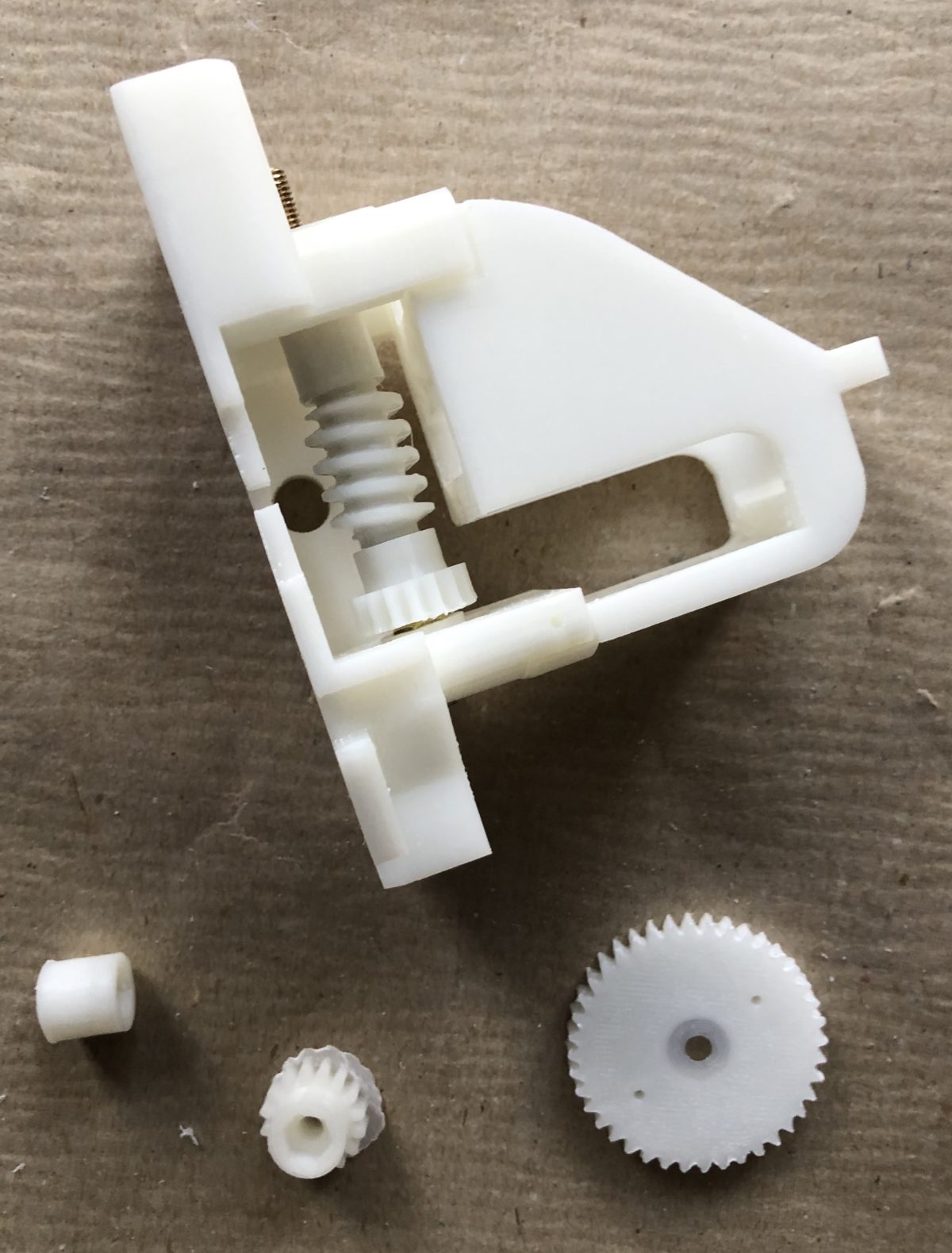
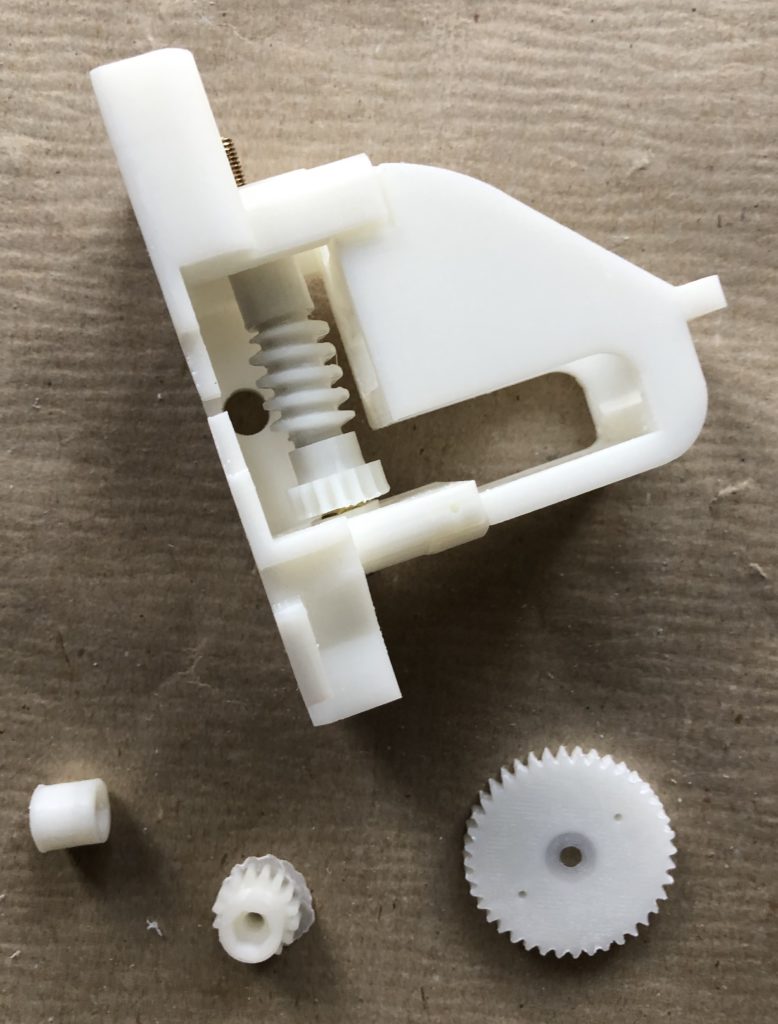
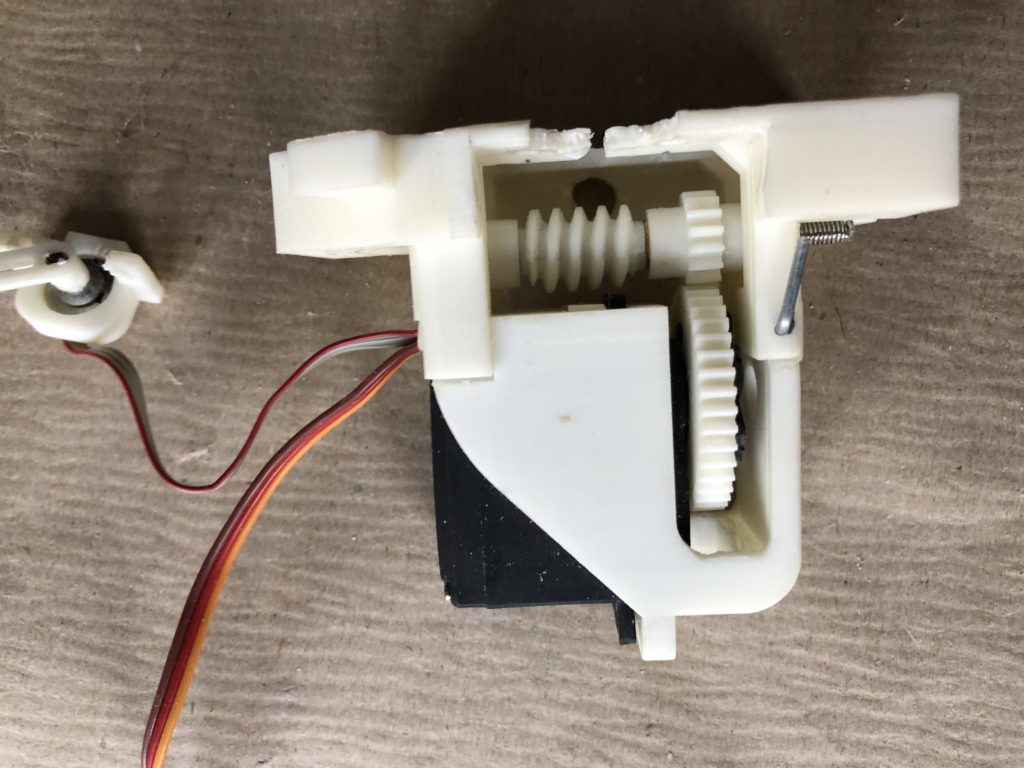
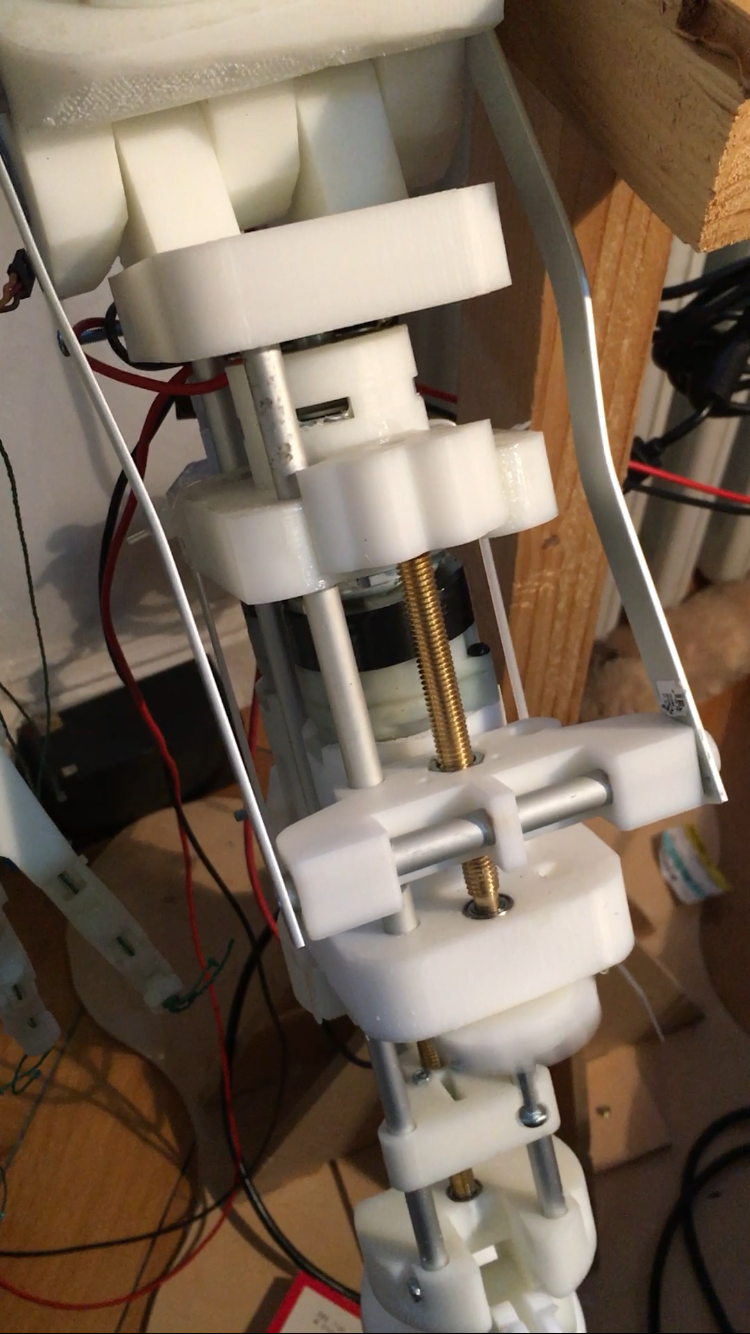
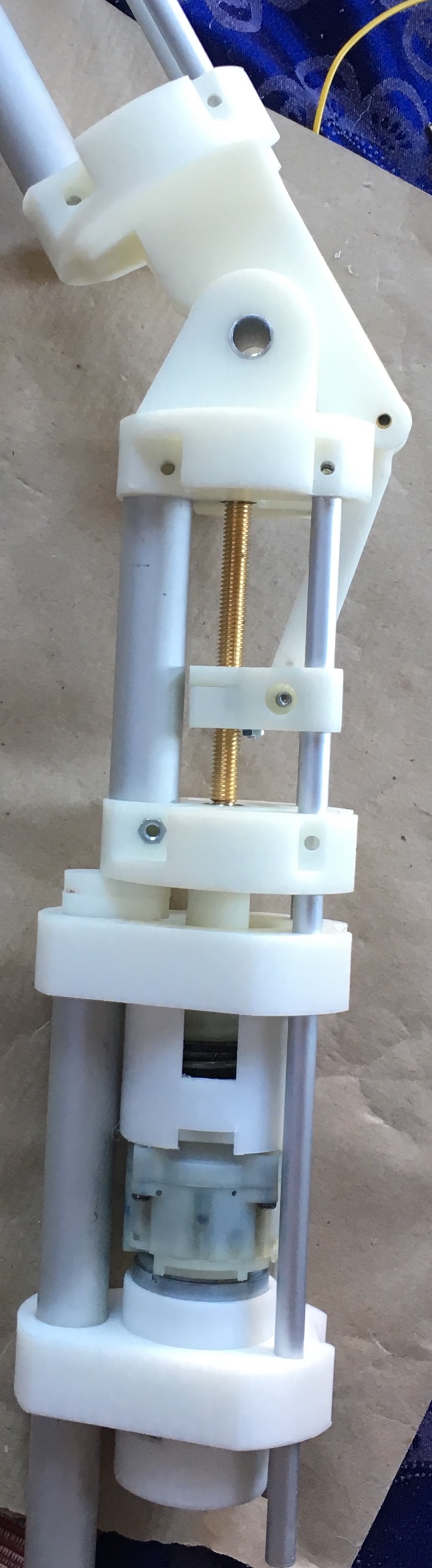
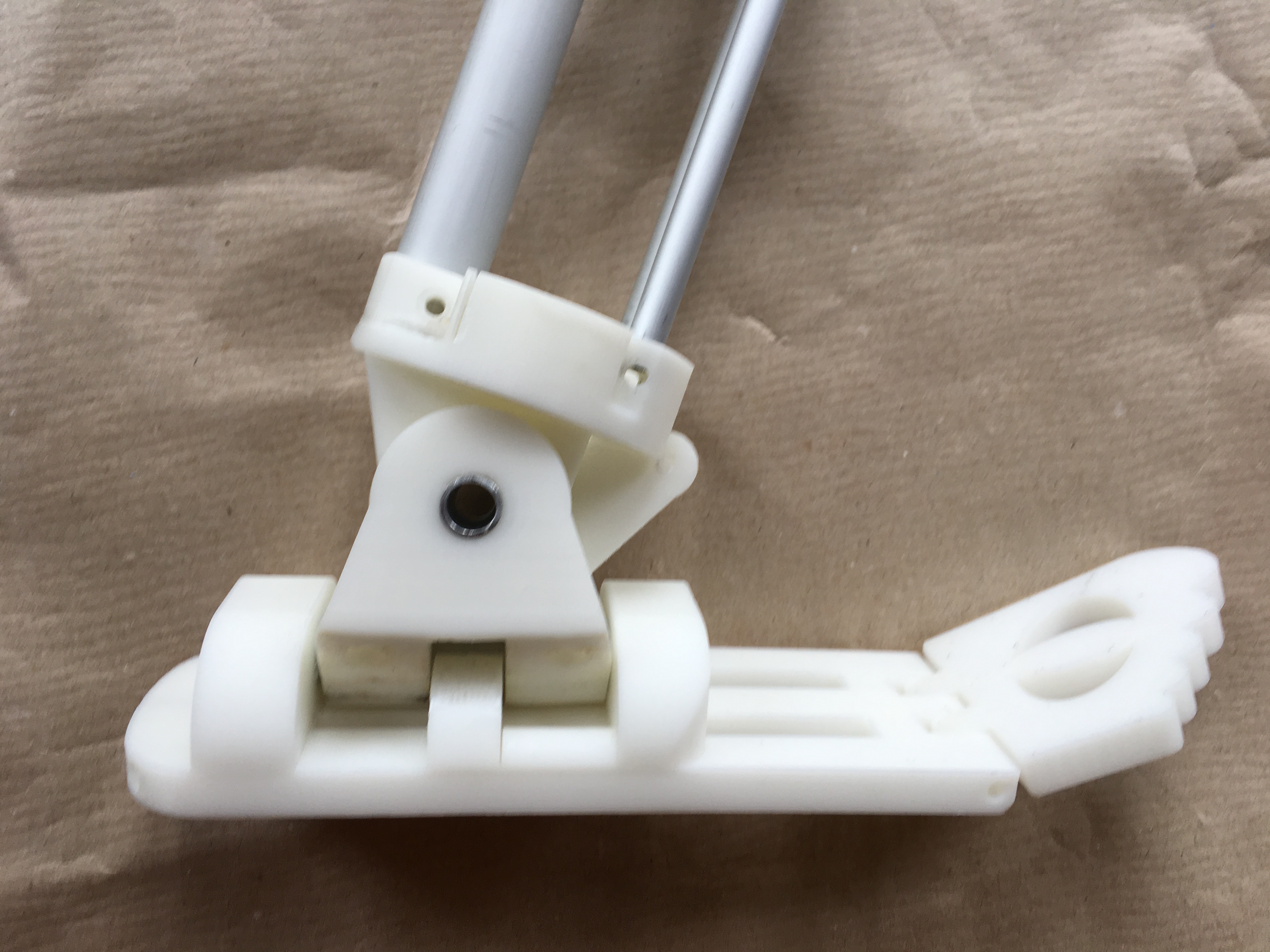
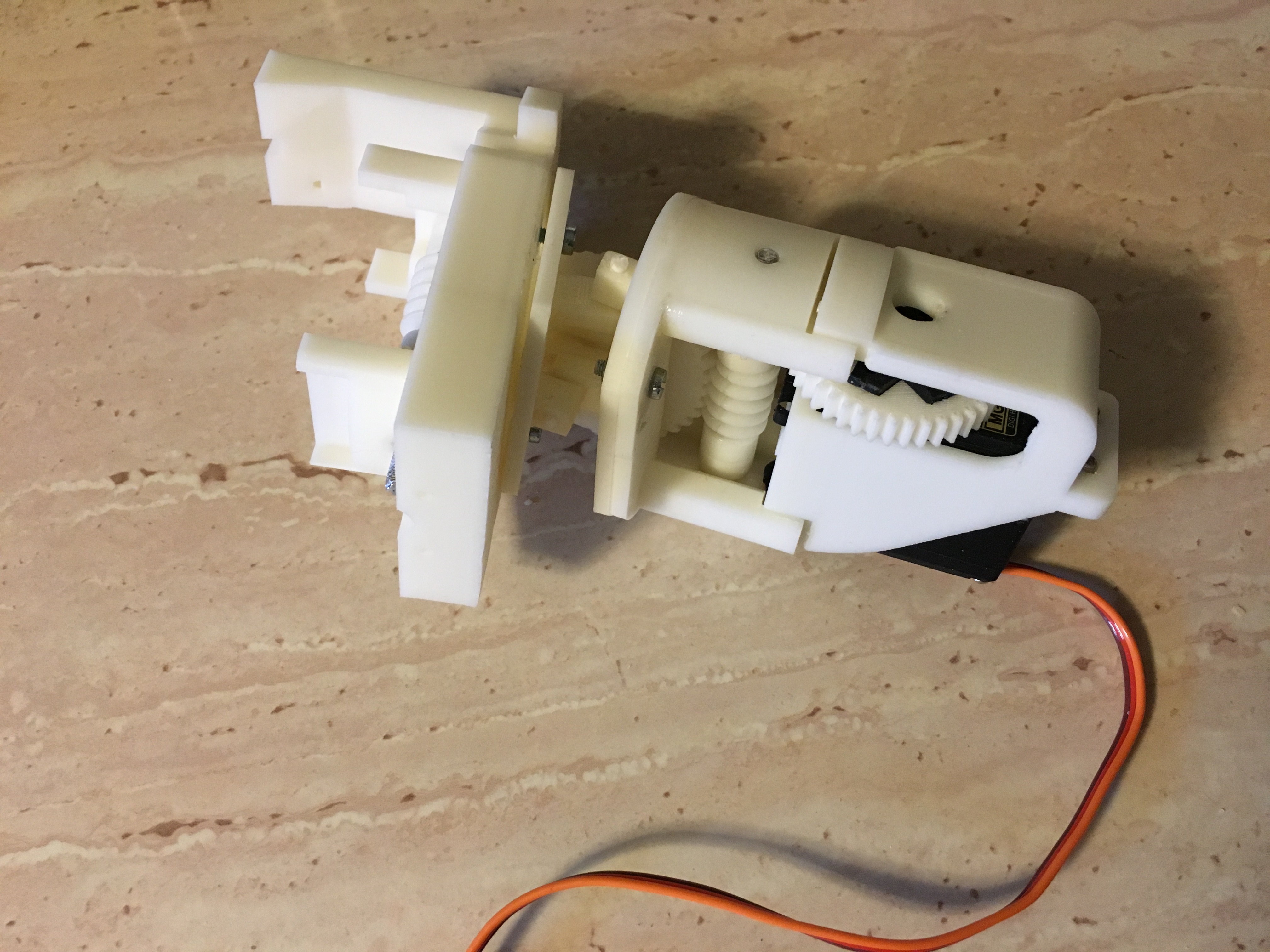
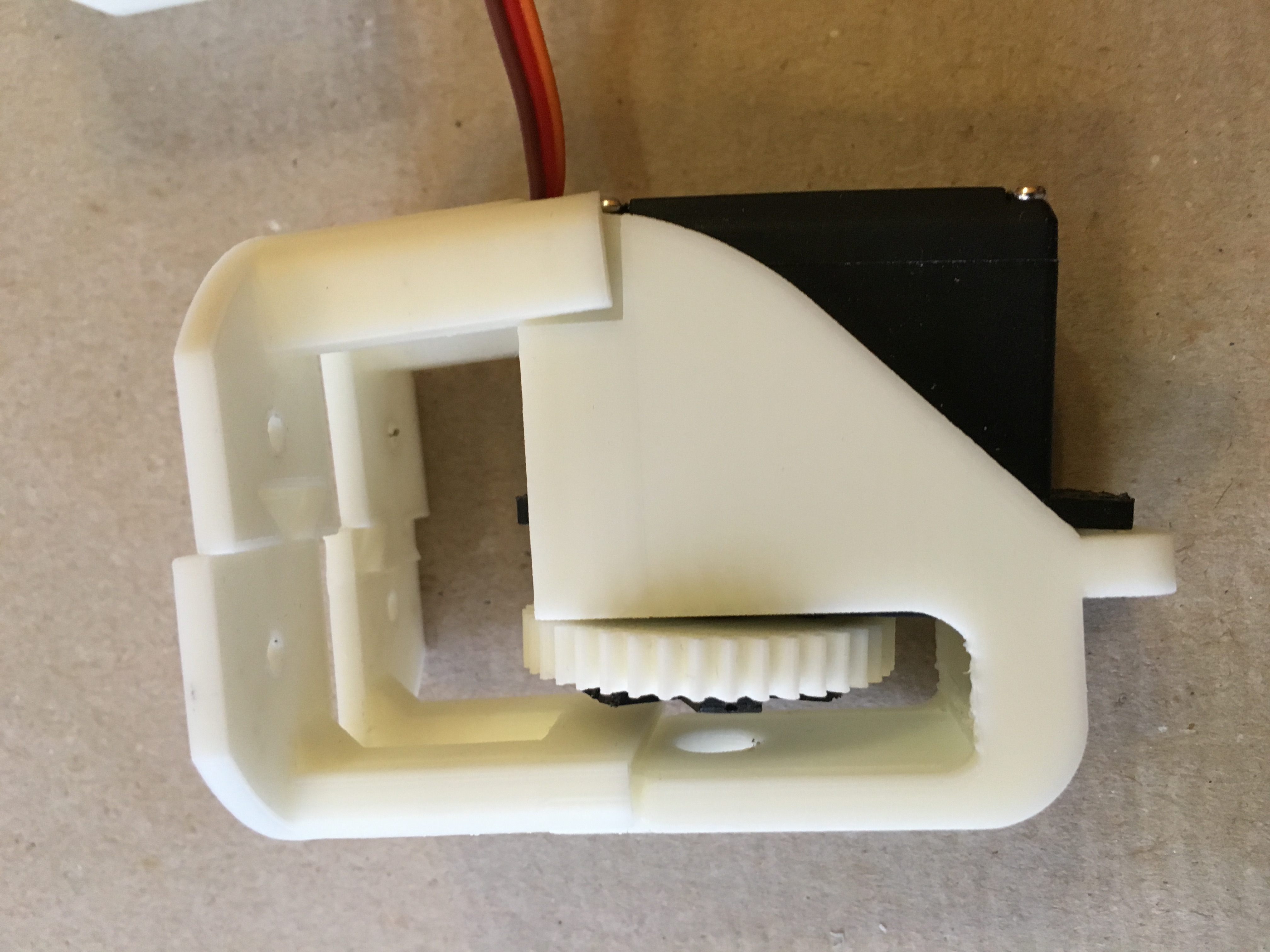
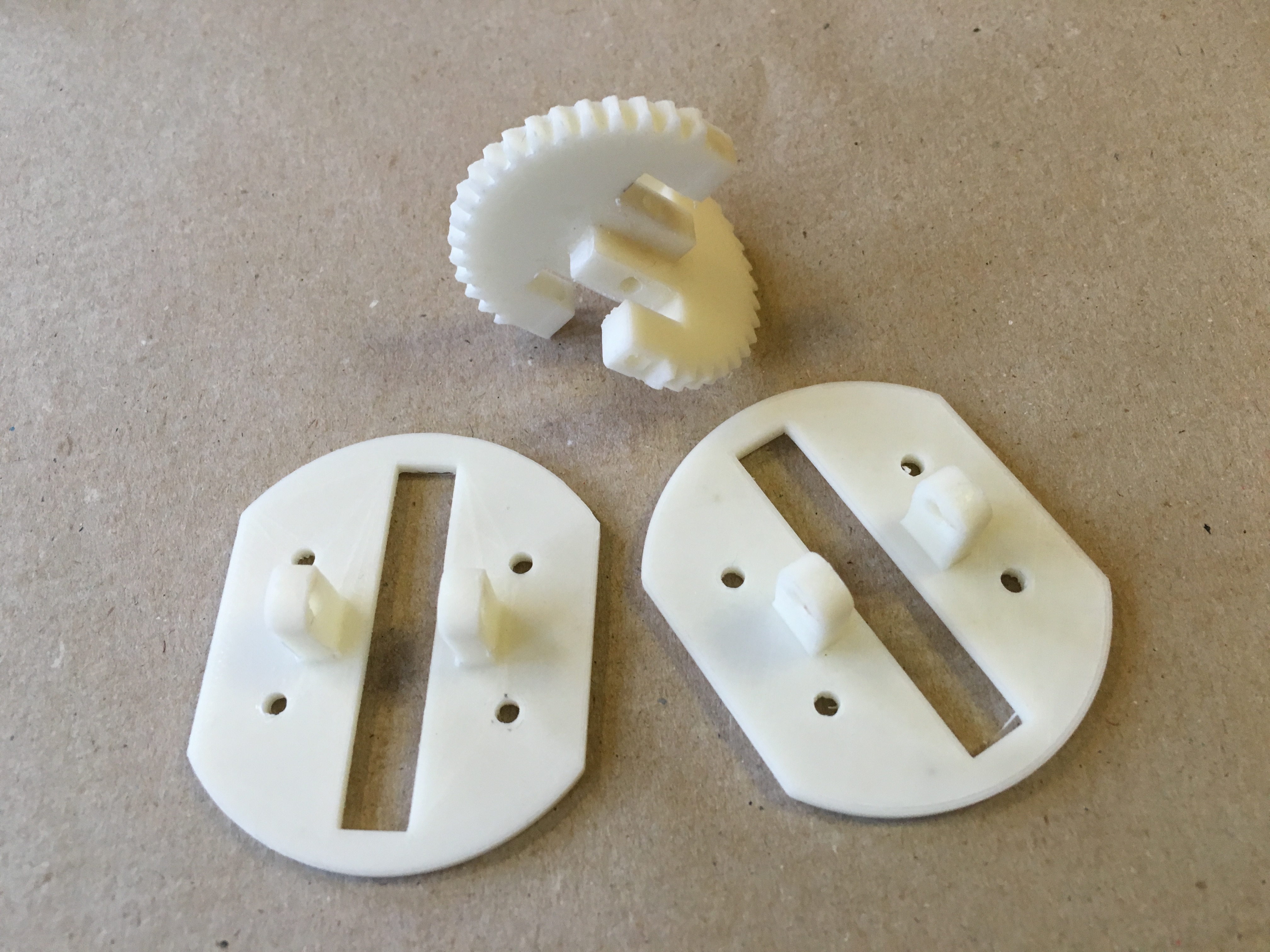
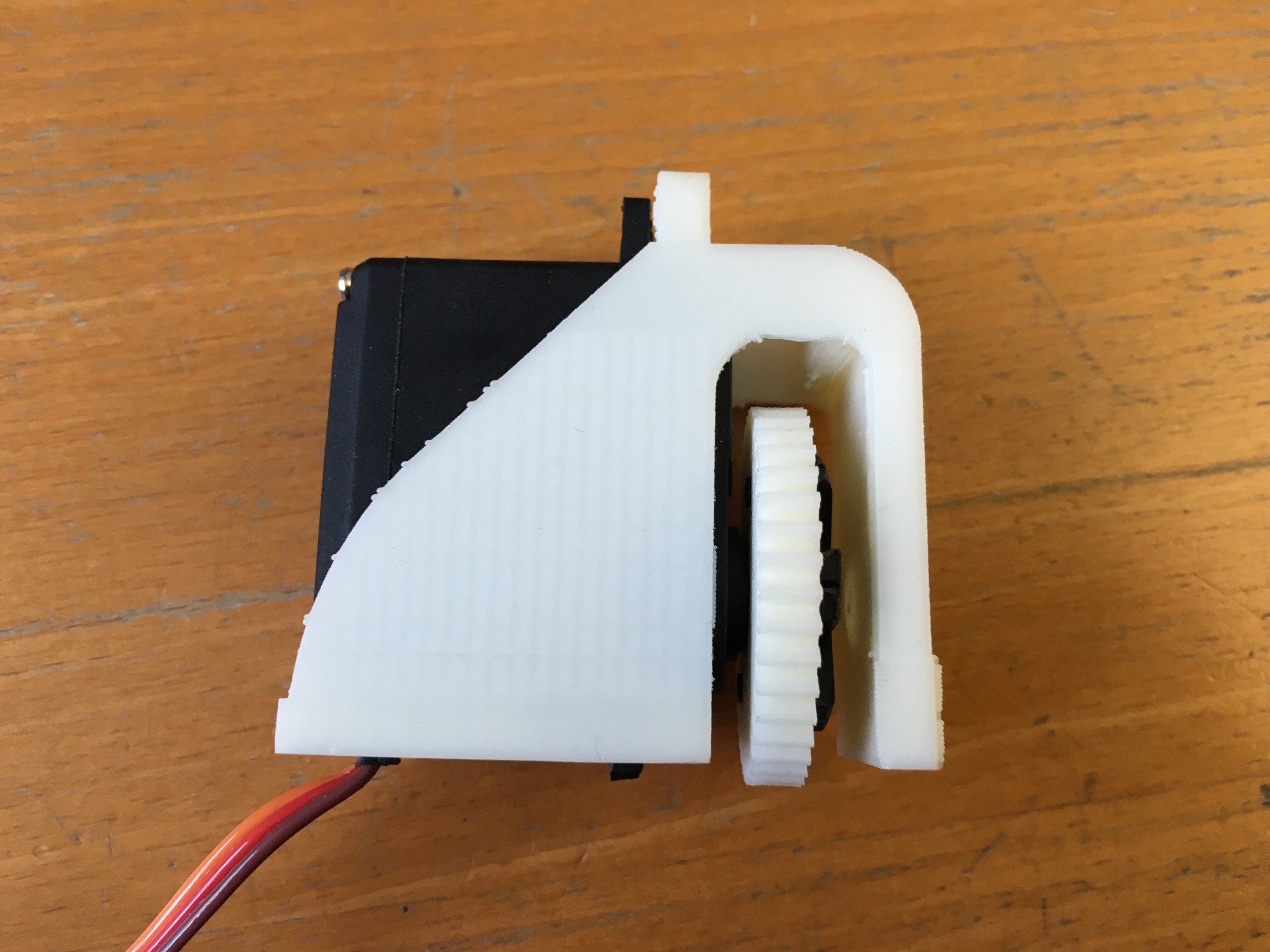
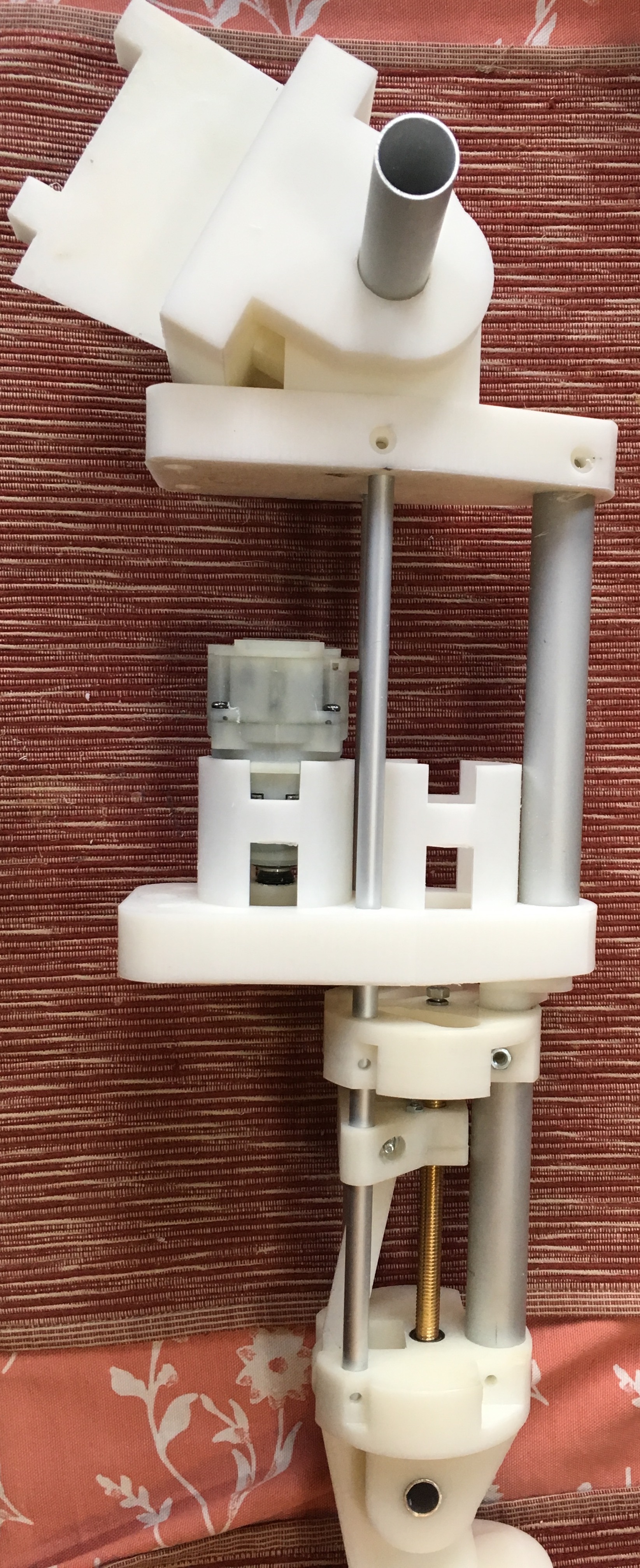
Das Getriebe mit dem Mitnehmer für die Achse und der Motor
Die Achse für den Oberschenkel am beweglichen Teil
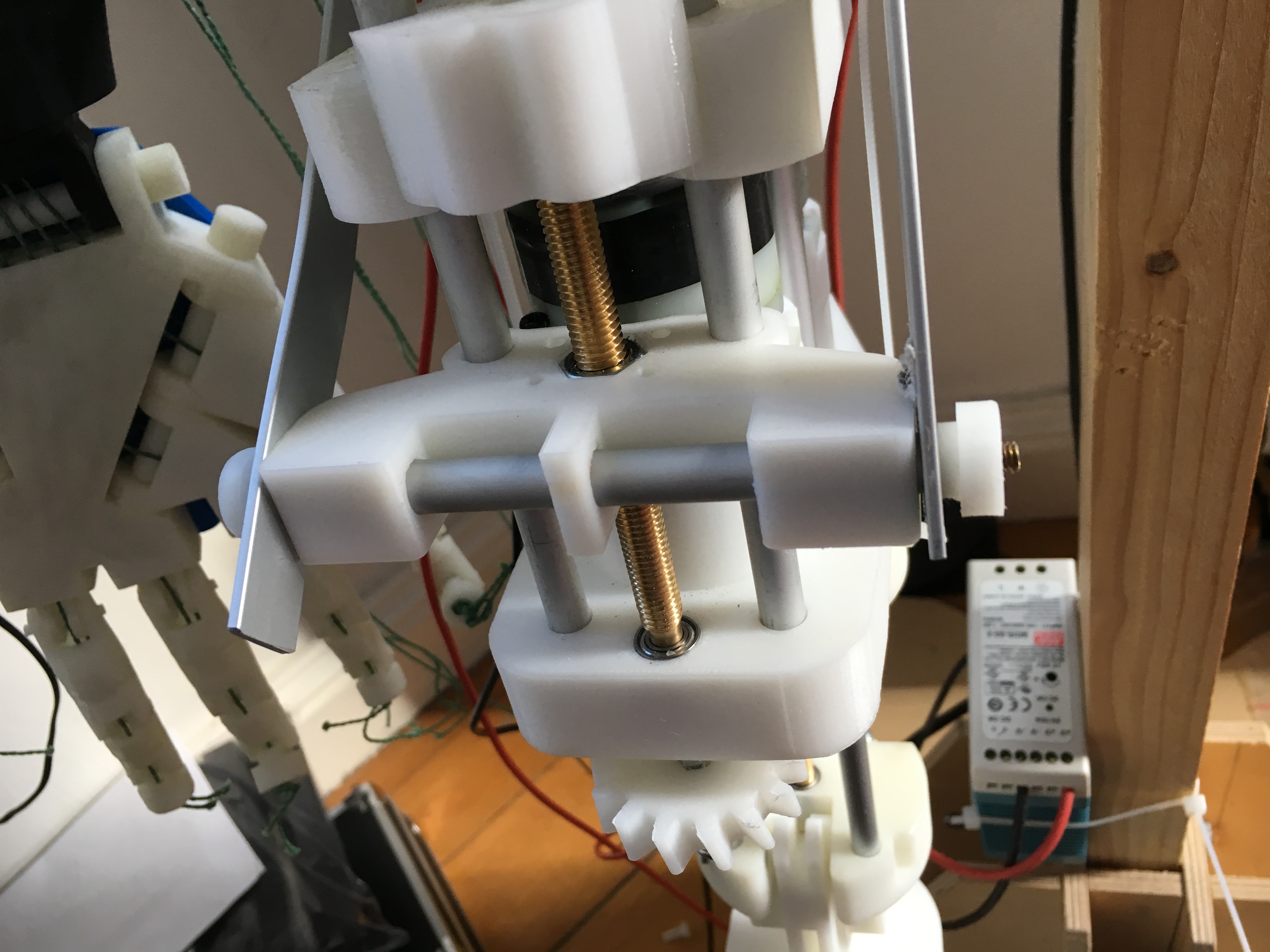

Noch ein bischen wackelig aber ansonsten ok

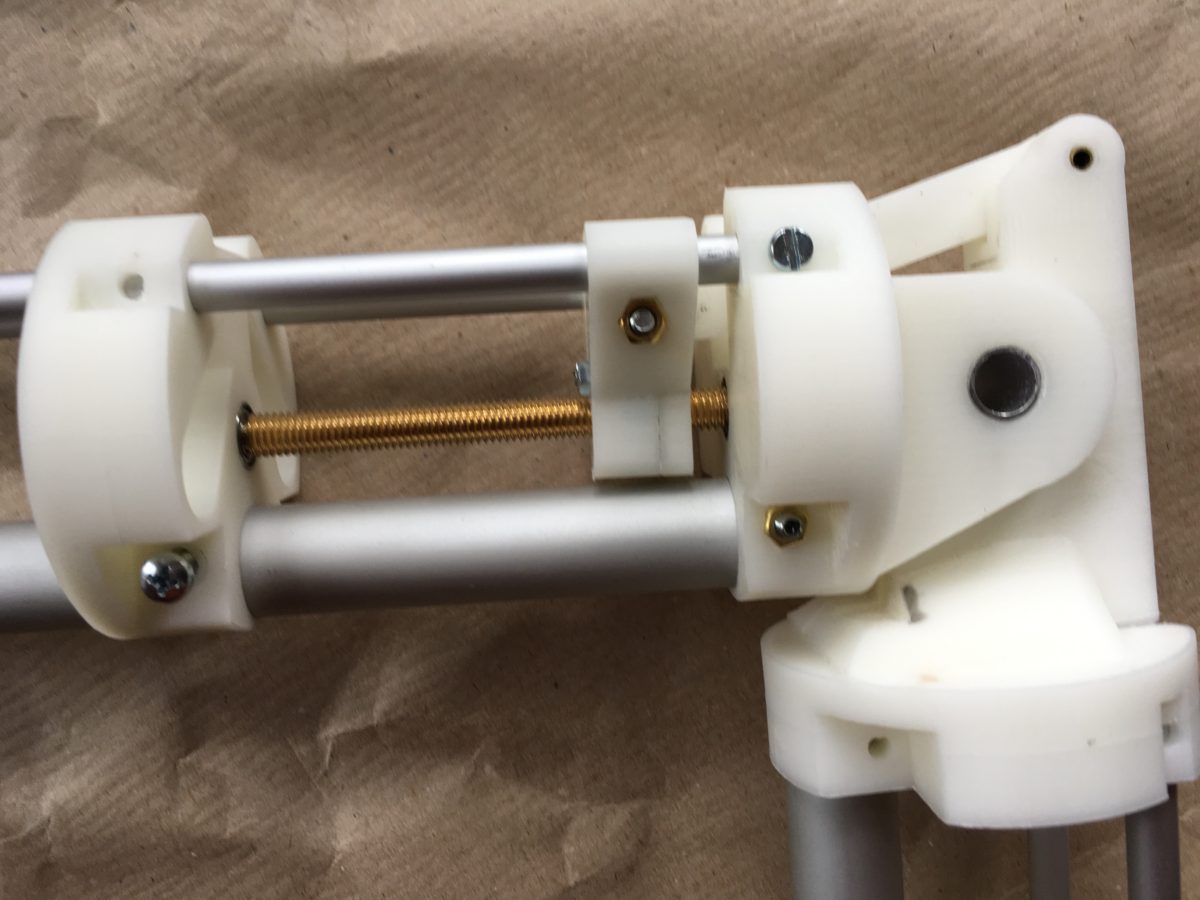
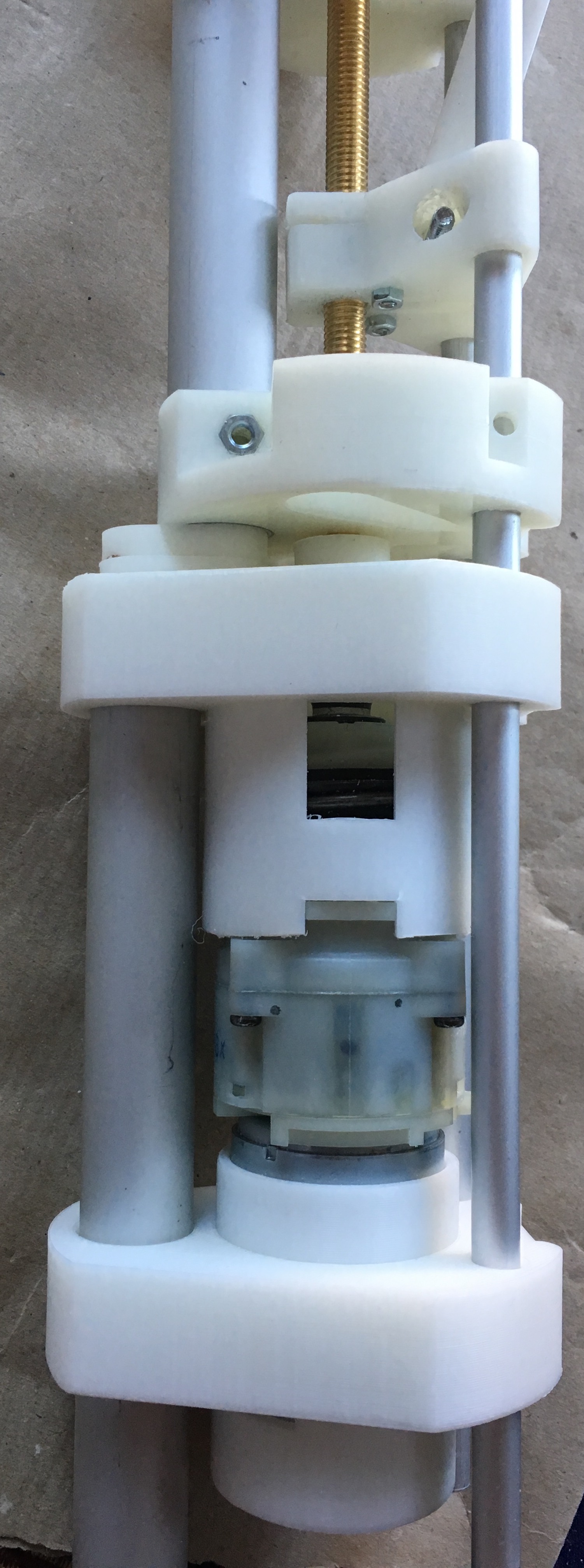
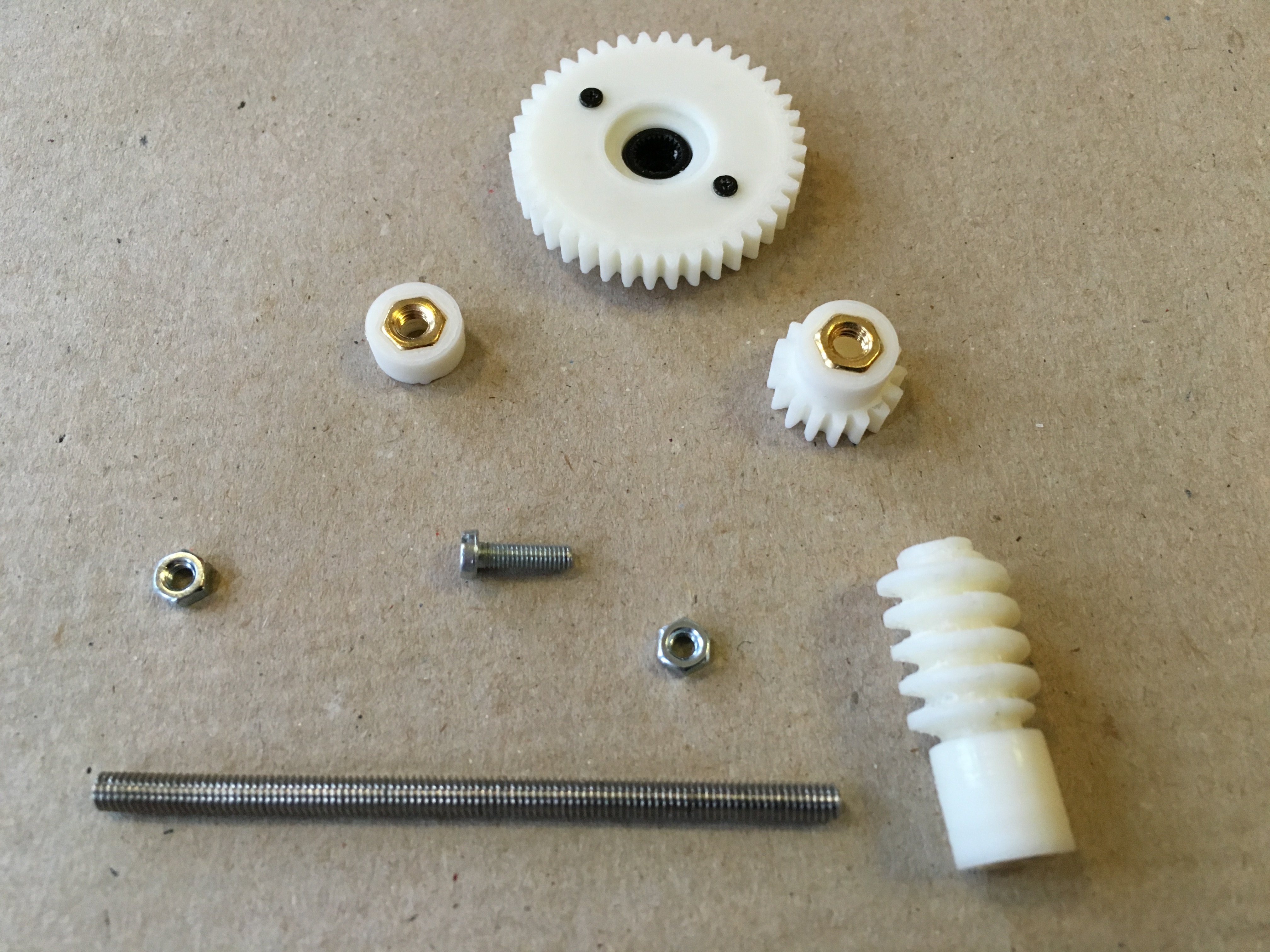
So nun habe ich mal einen Motor mit Getriebe von Makita bestellt
Dieser hat genügend Power um den Körper zu halten
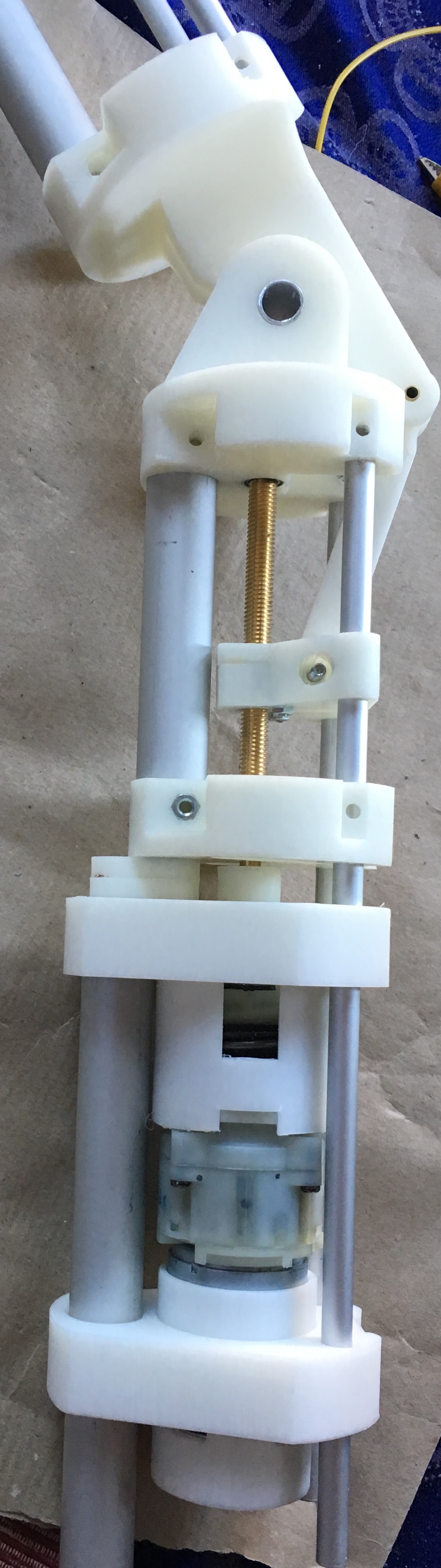
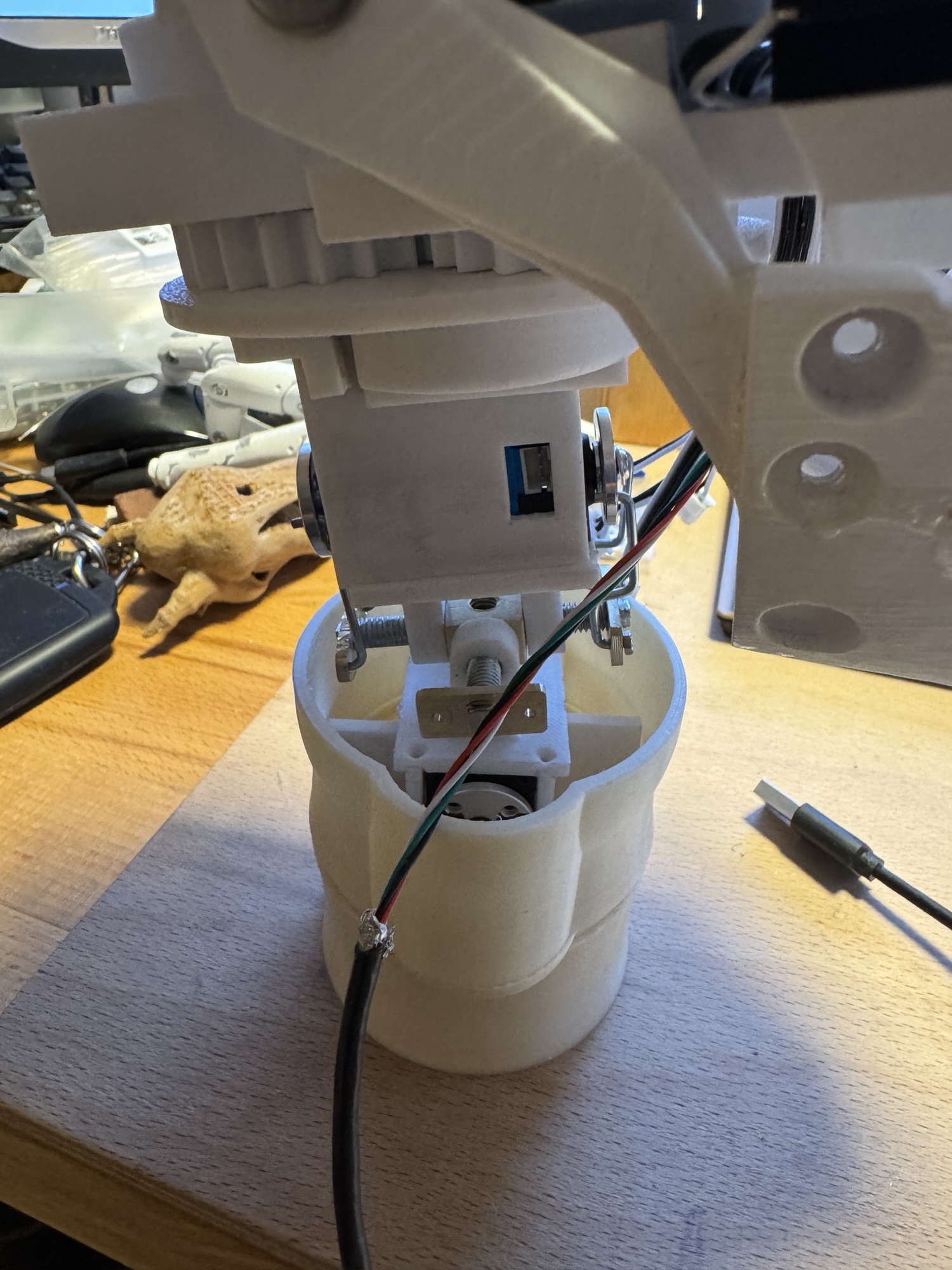
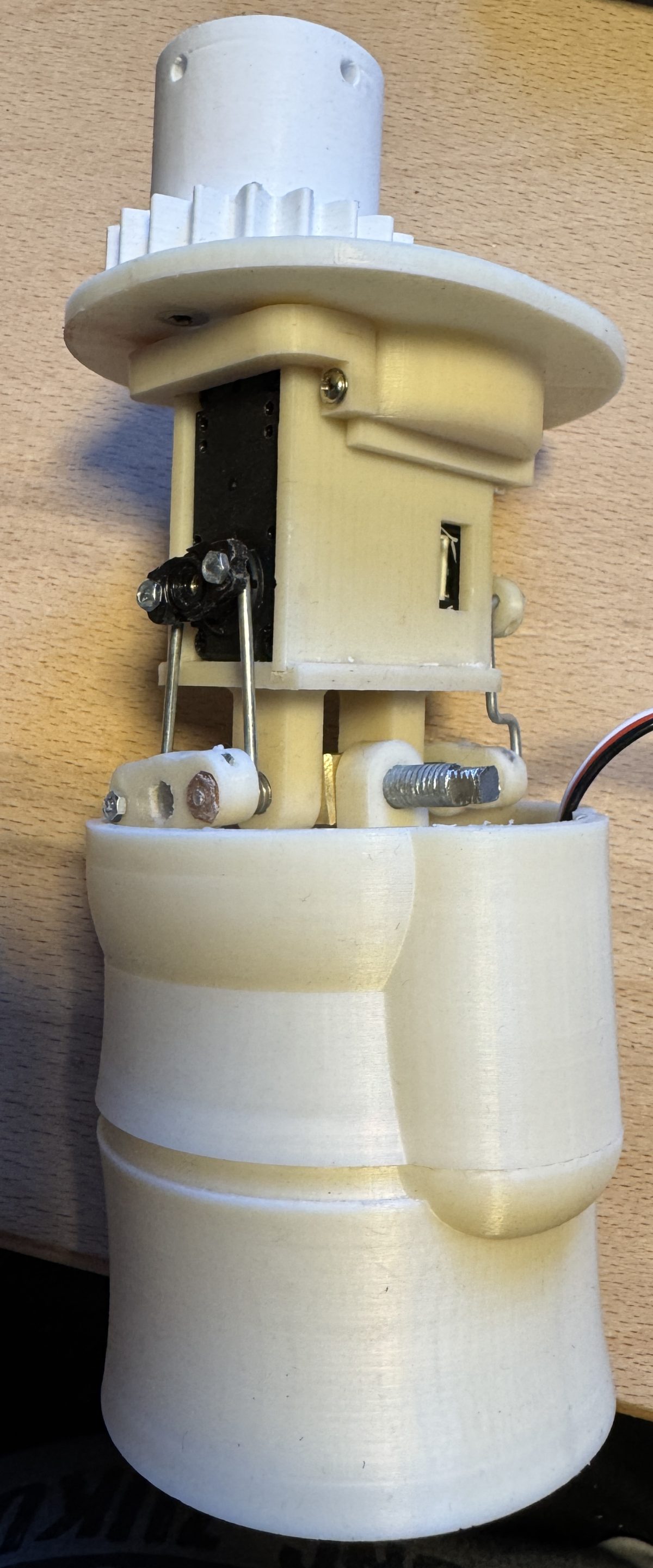
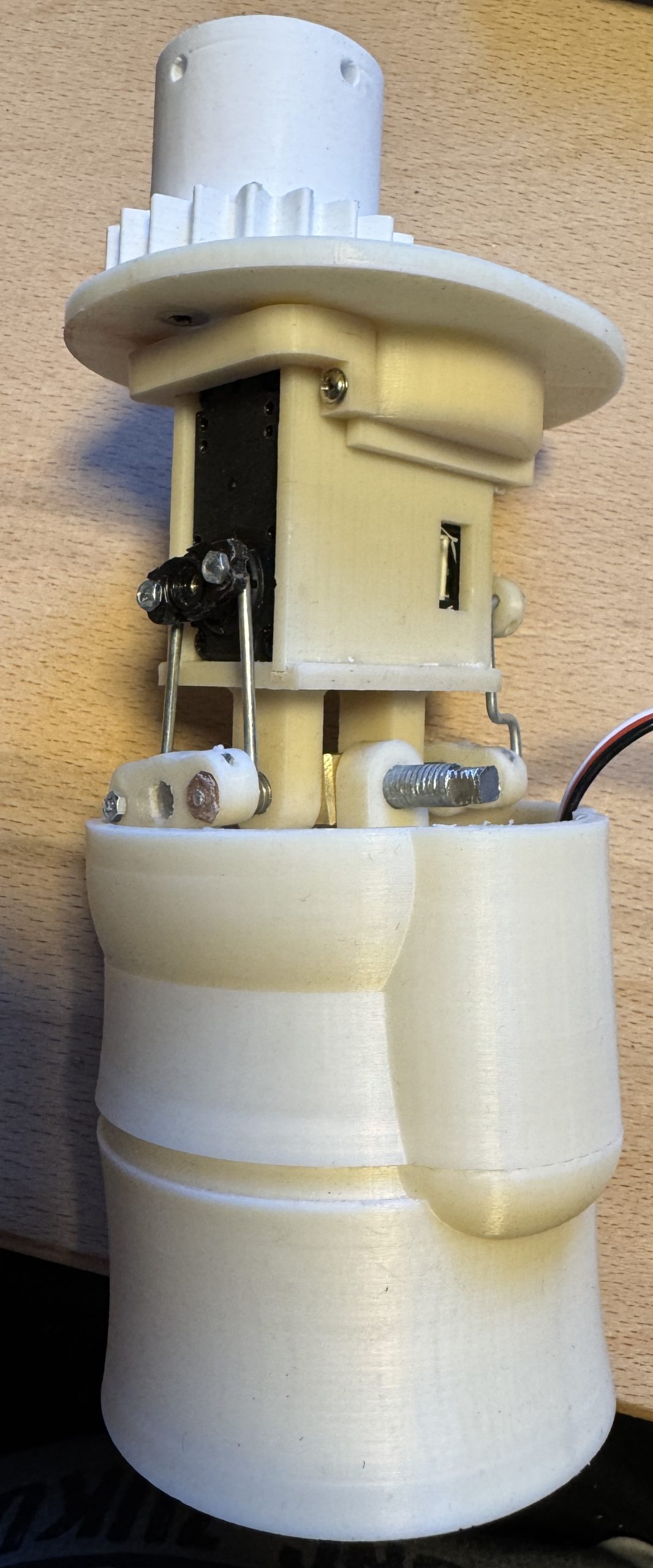
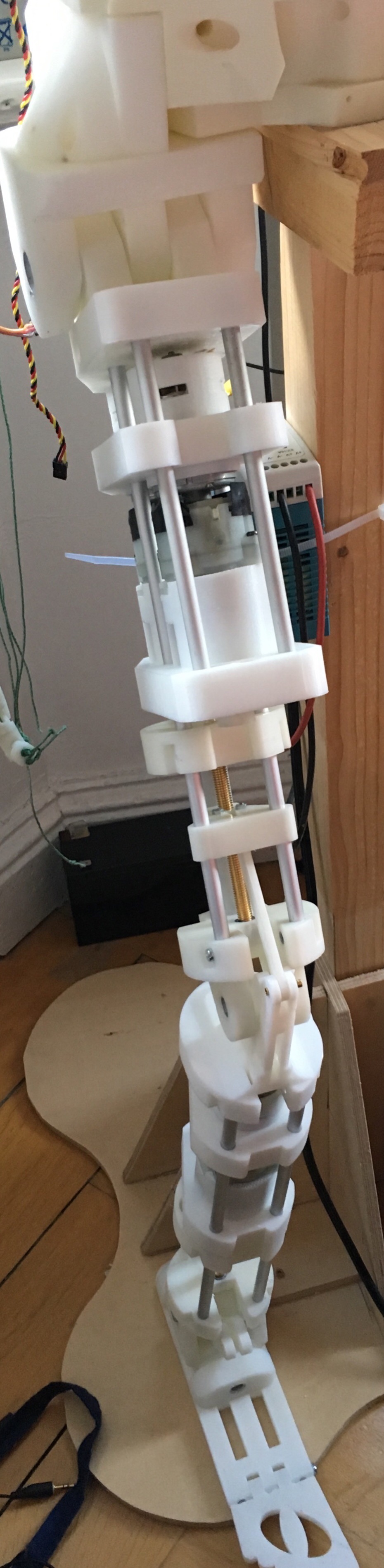
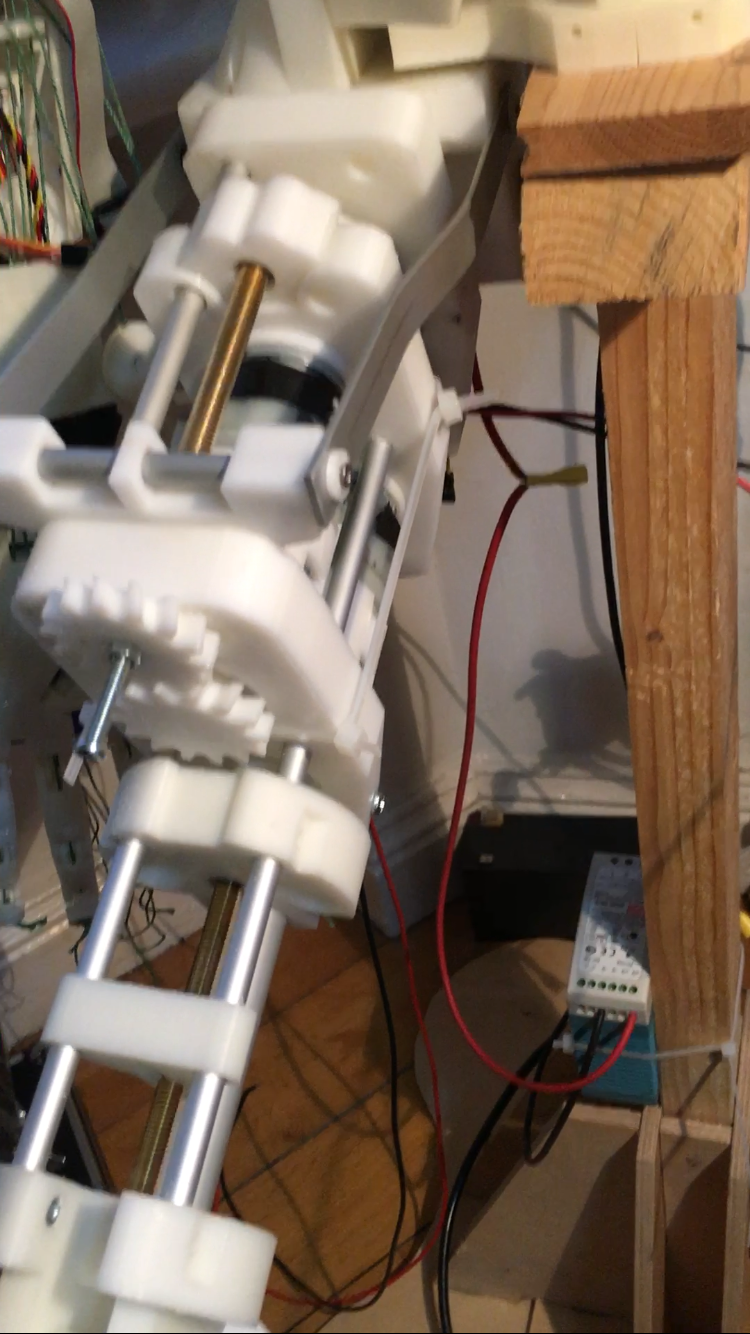
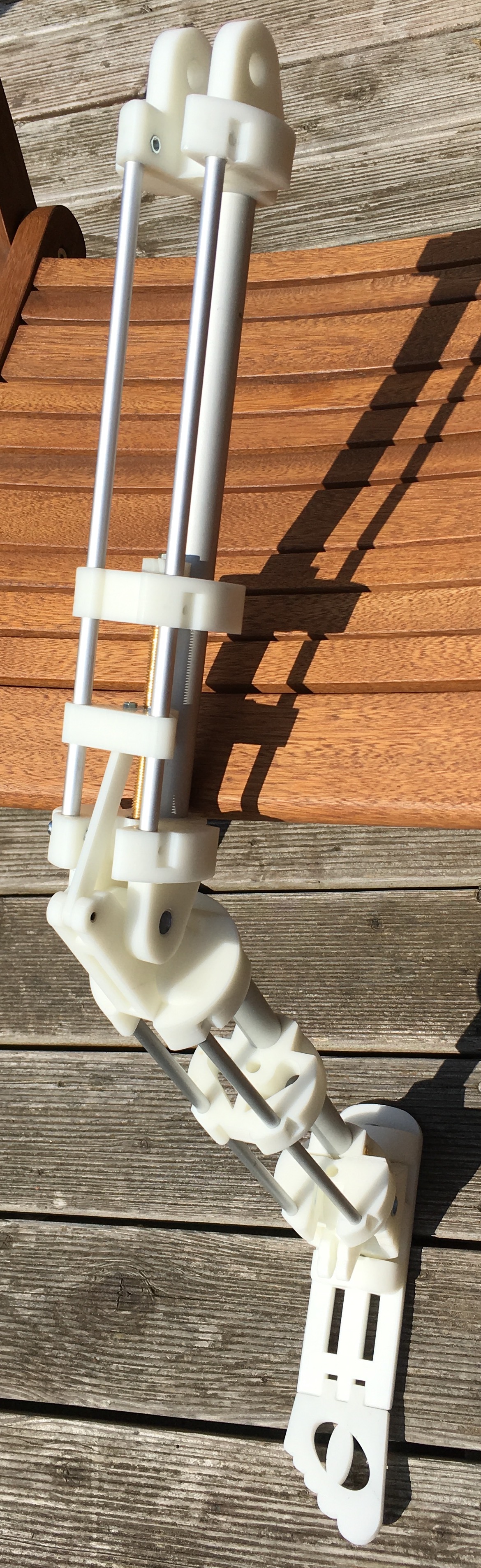
Hier sieht man das die Rohrführung nicht mehr in einer Linie ist
das ist dem neuen Motor mit Getriebe geschuldet


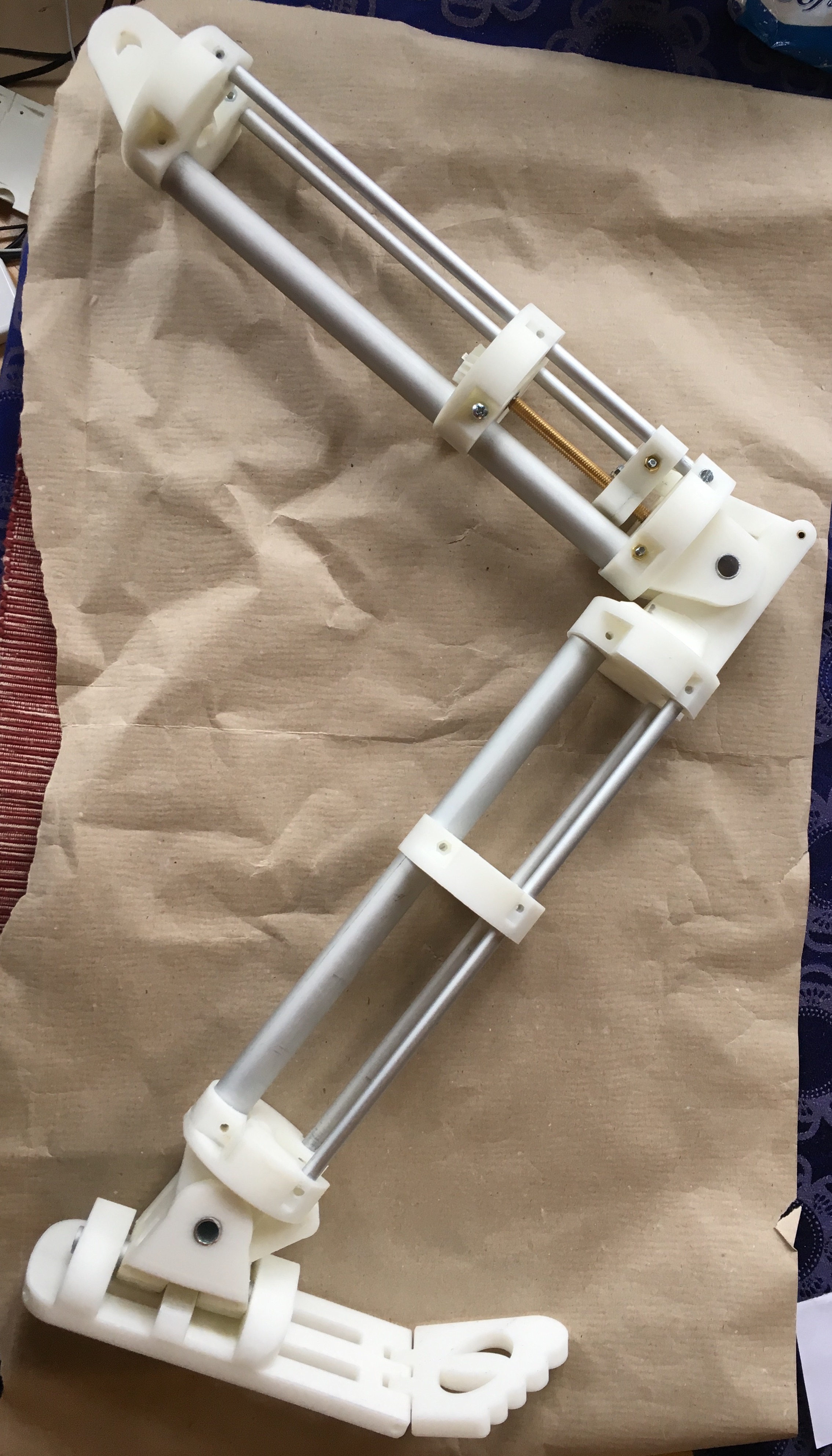
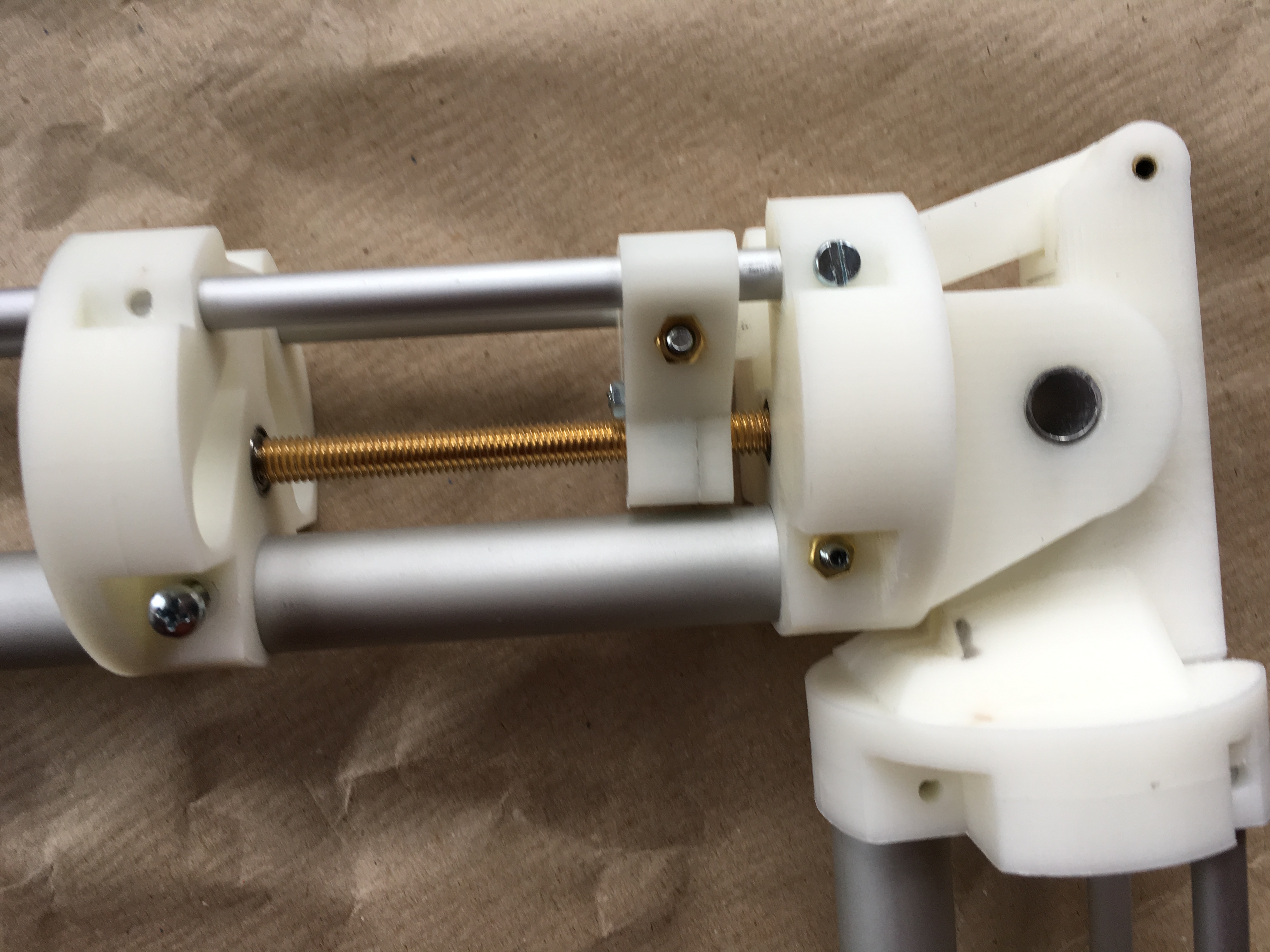
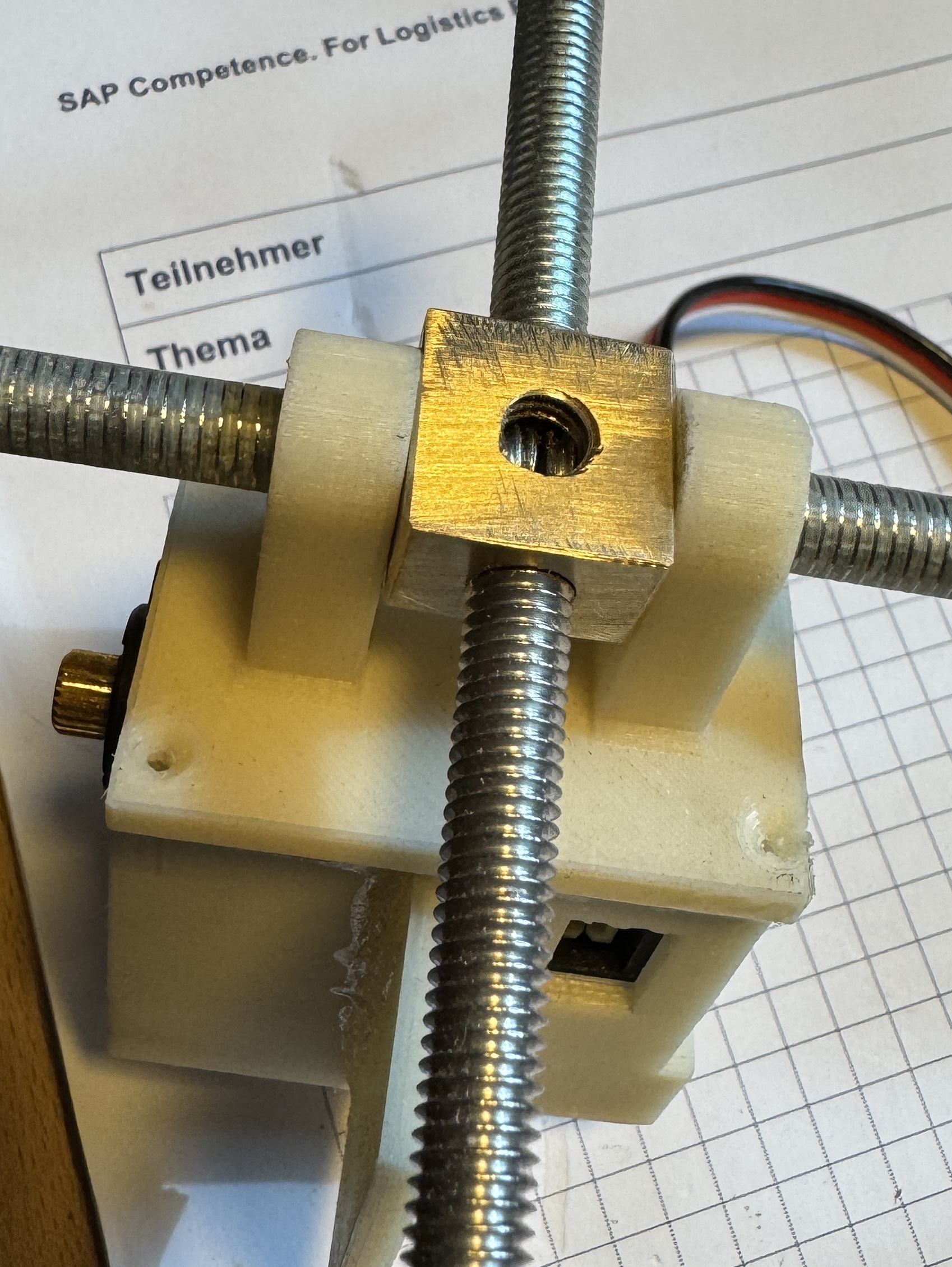
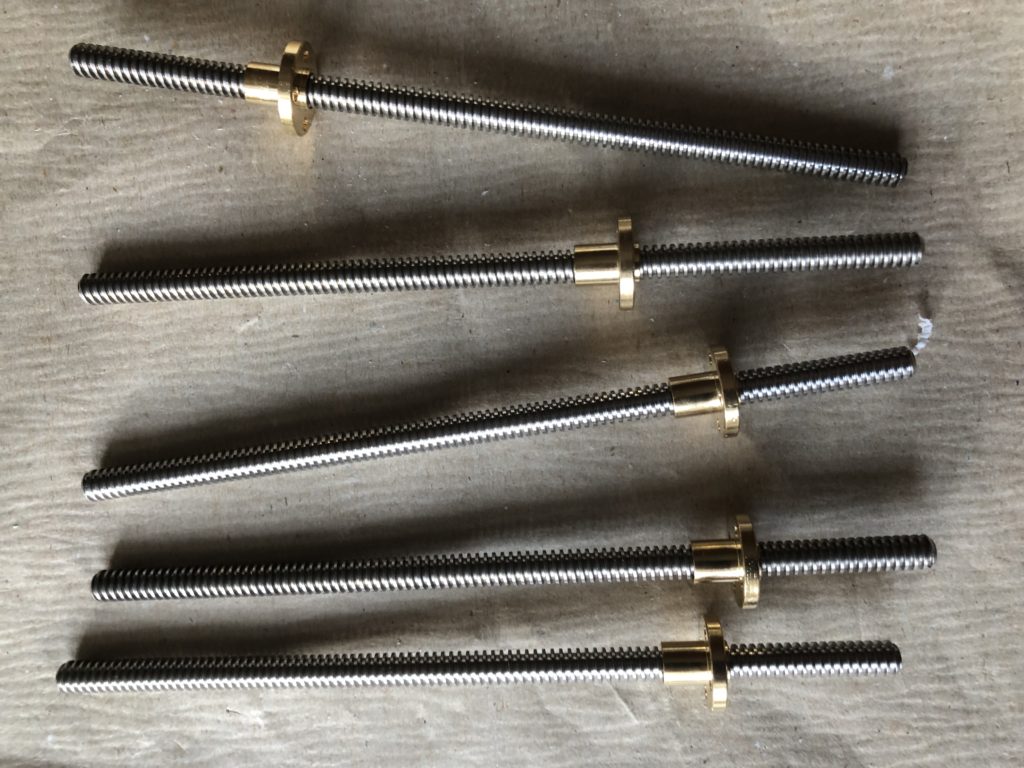
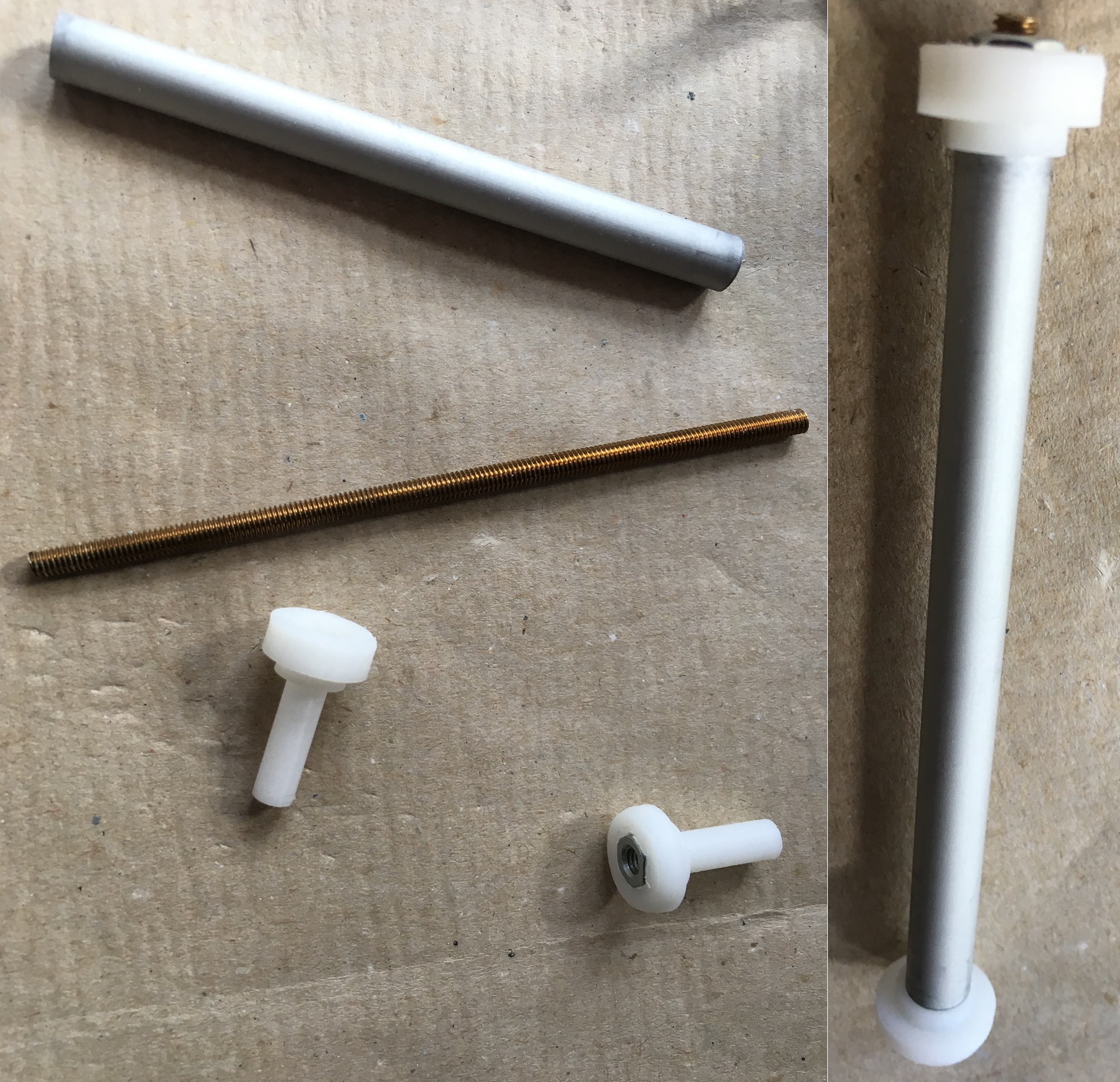
Hier sieht man in dem mittleren Bild die Gewindstange, die die Bewegung des Knies übernehmen soll

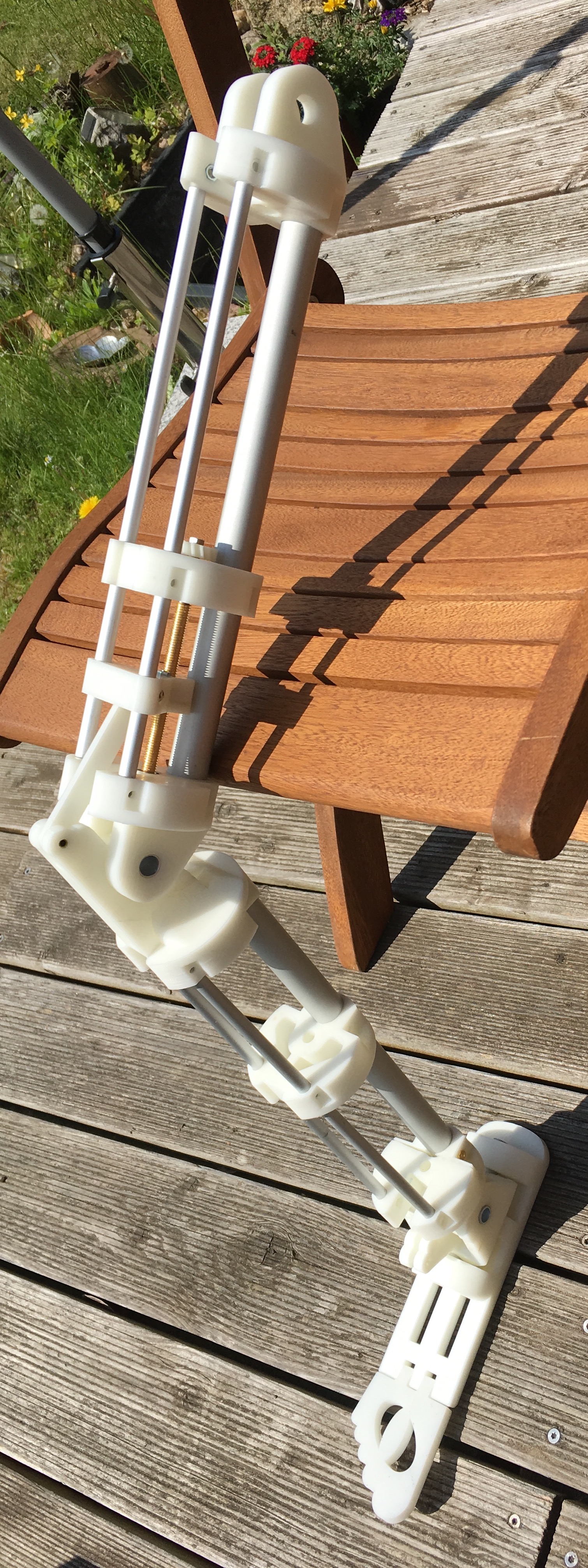
Bei schönem Wetter kann sich mal auch so ein Bein ausruhen !


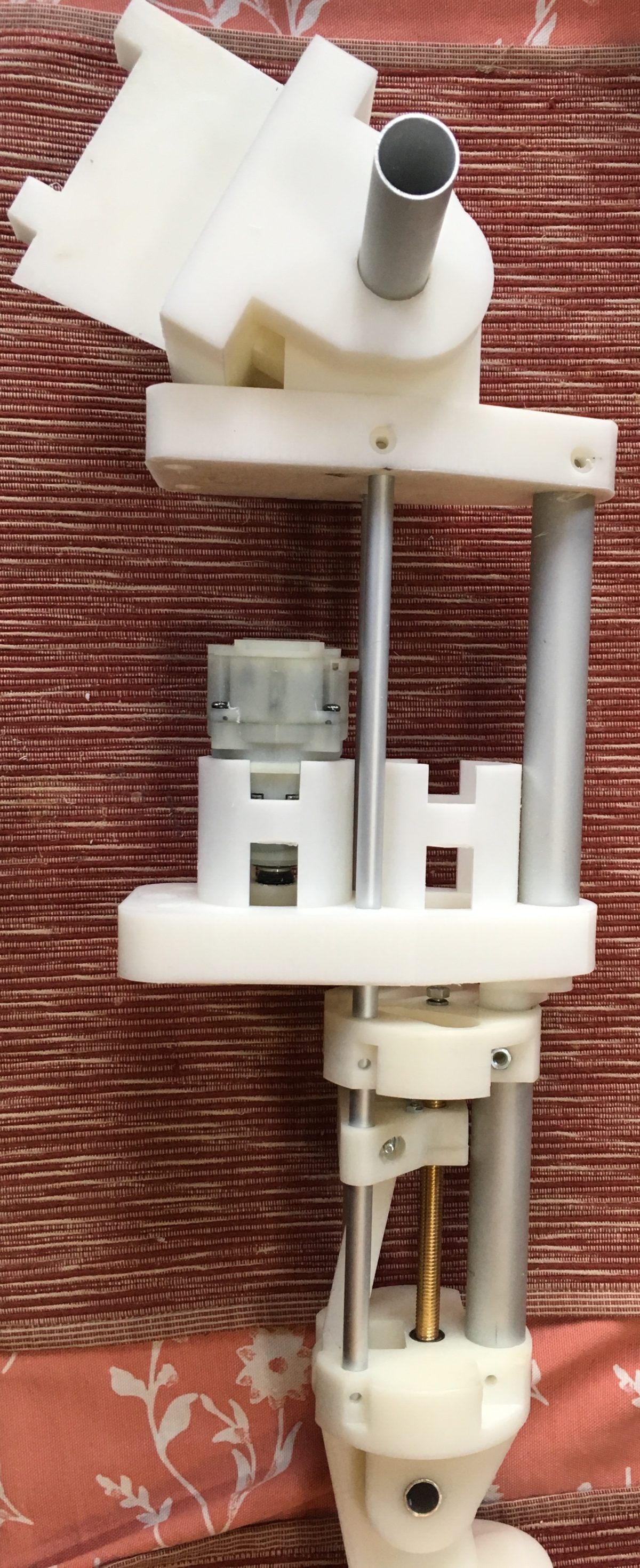
So jetzt ist der Unterbau getrennt und man kann die Achse
komplett fertig machen und dann hineinstecken

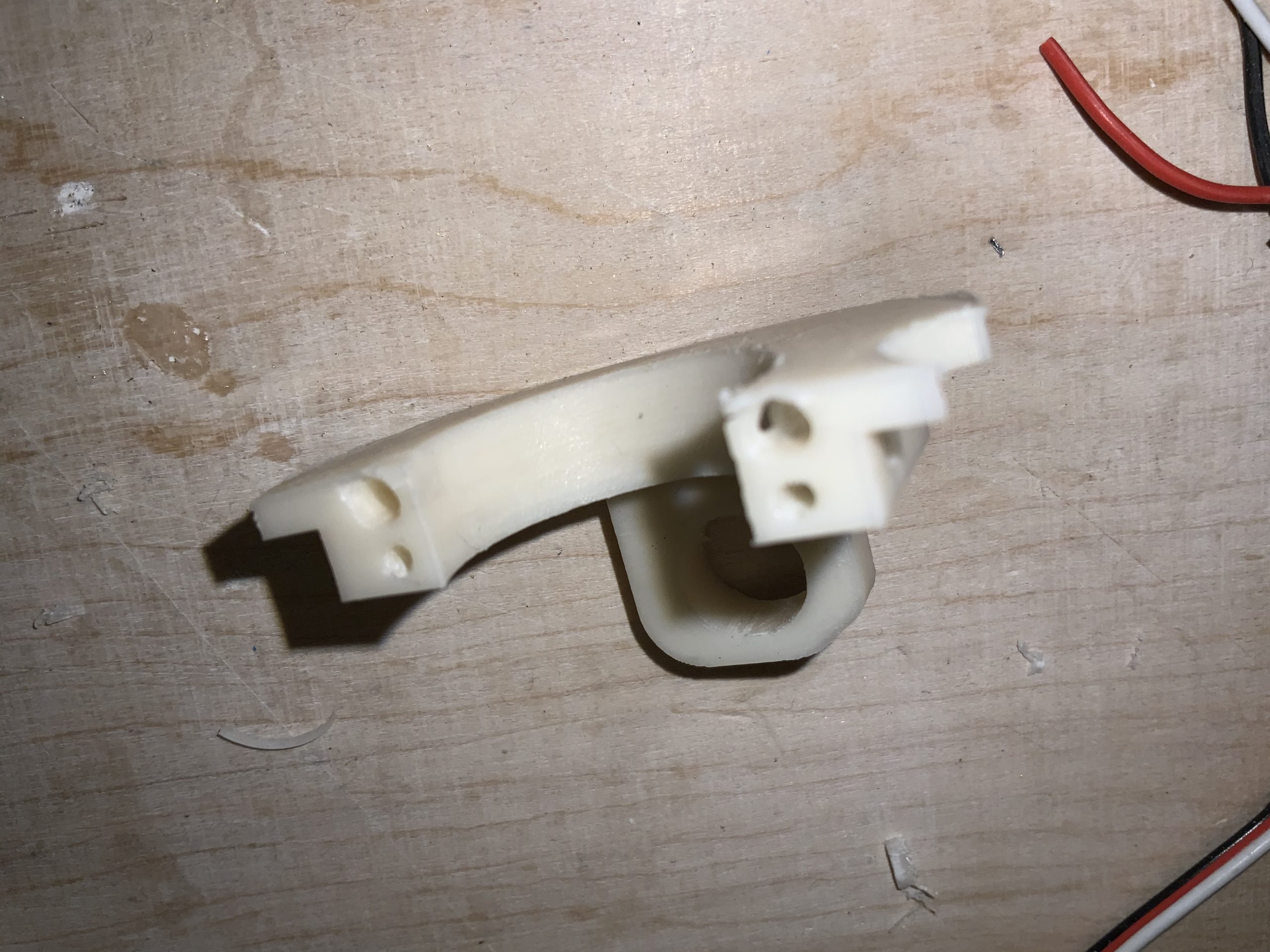
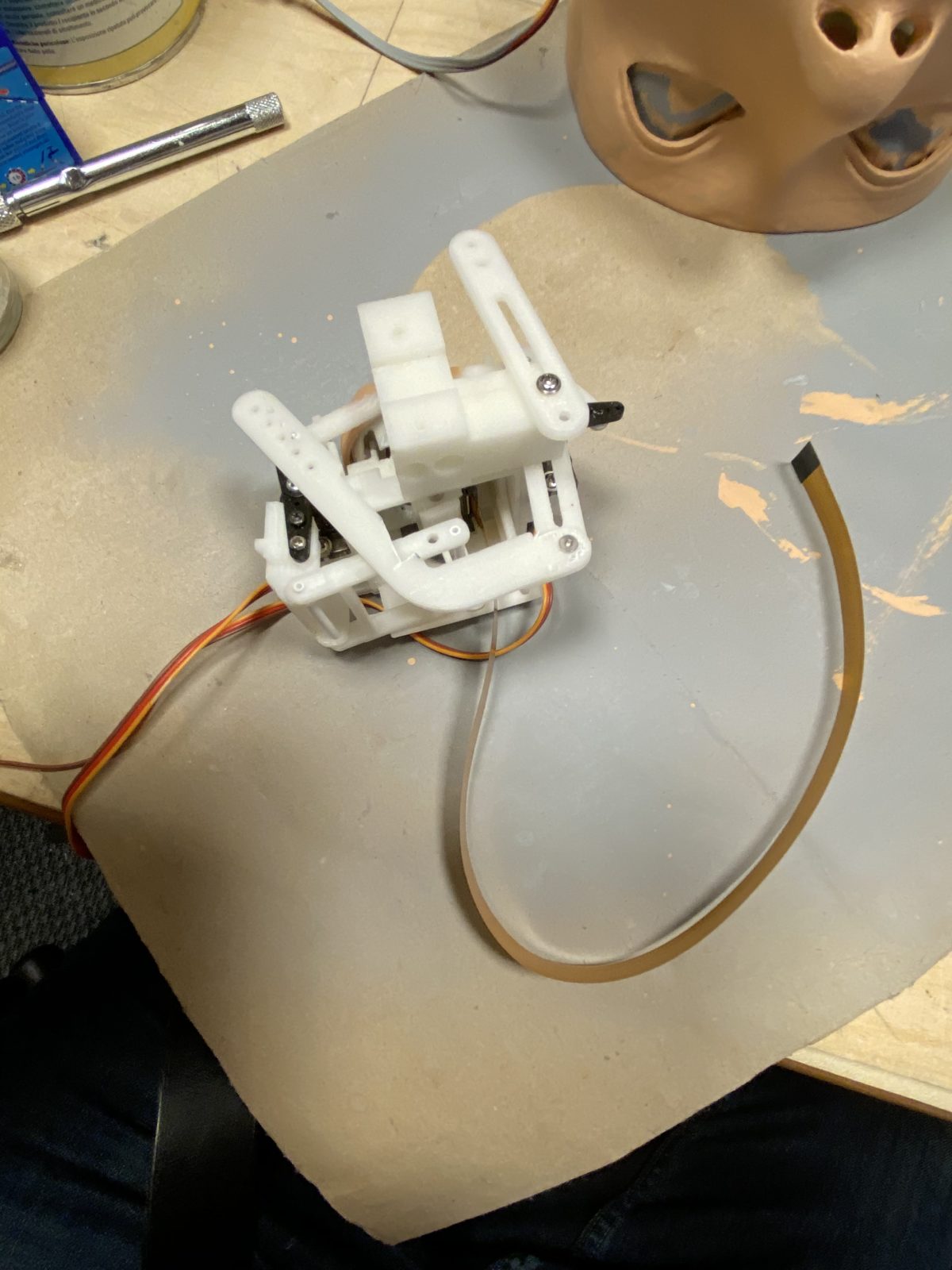
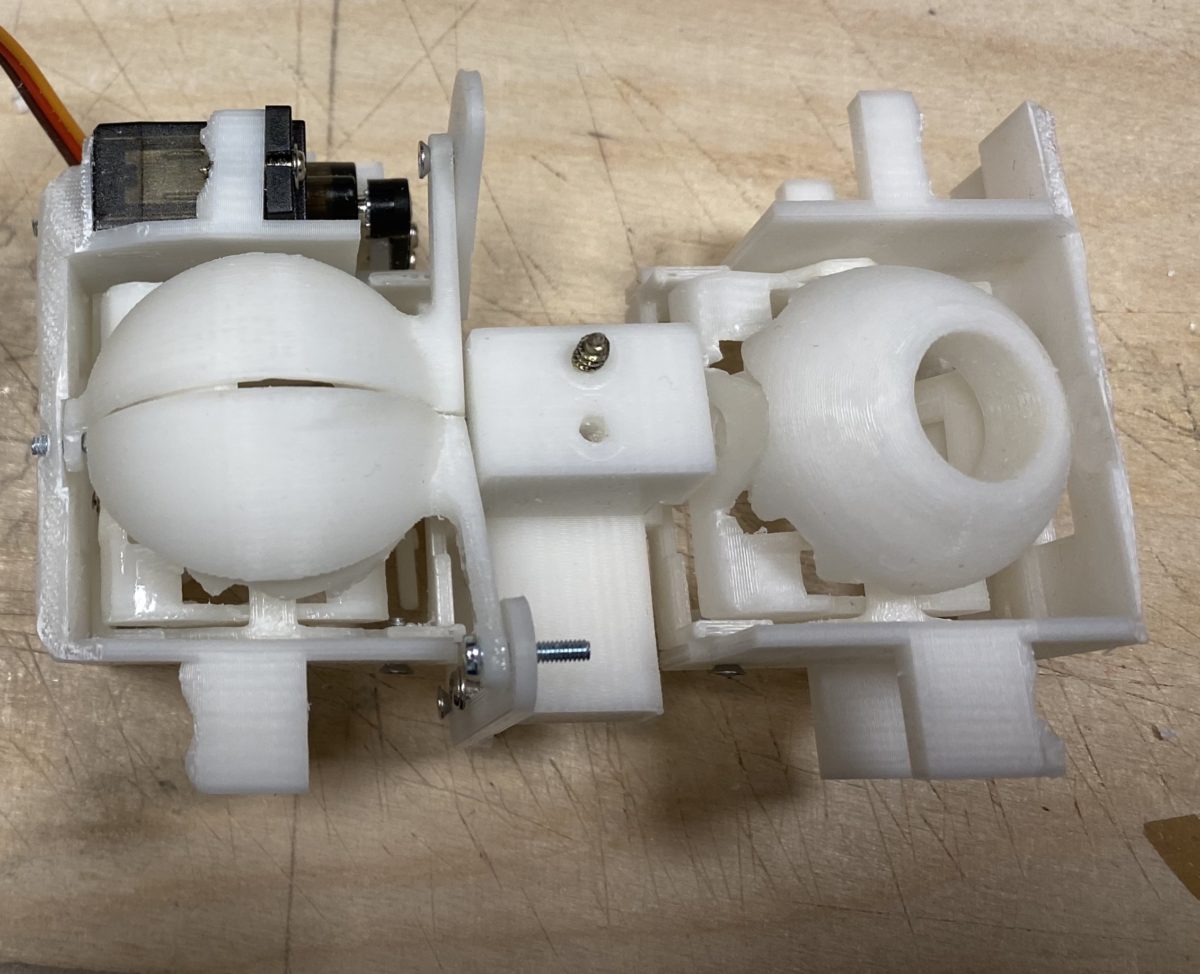
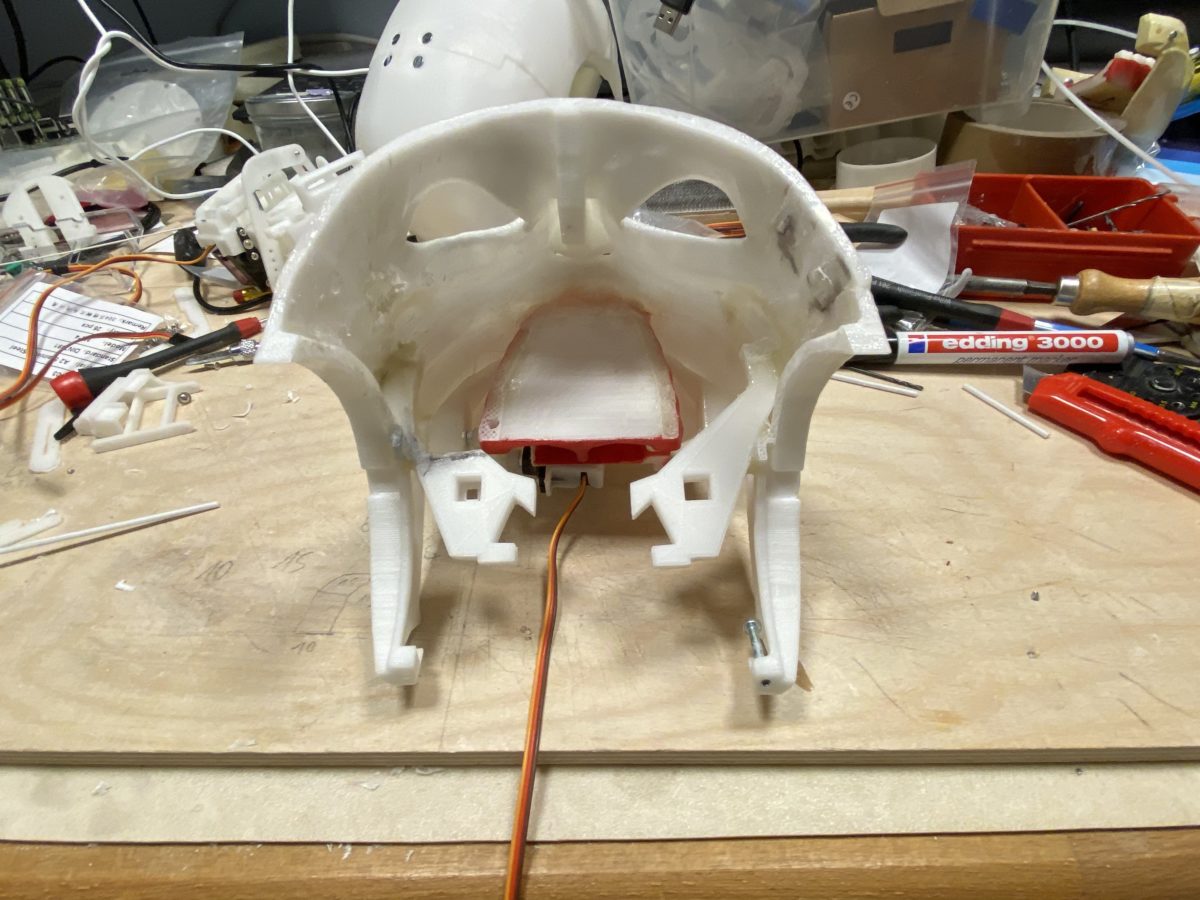
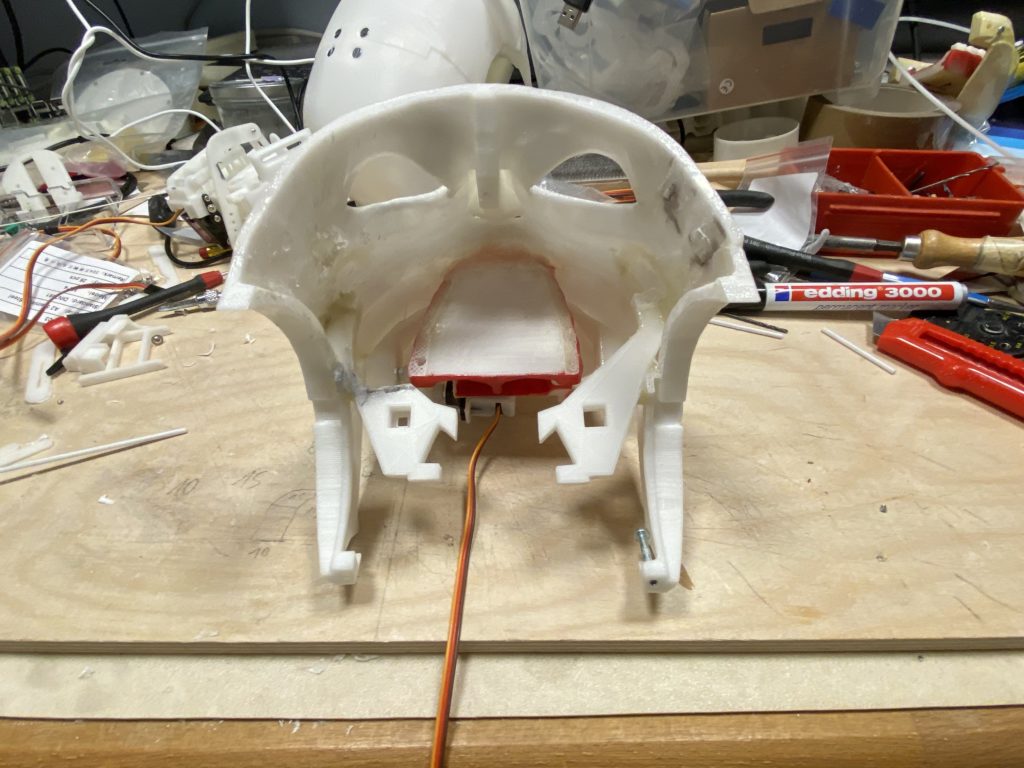
Das ist die Idee den Hals zu ändern
Das ist das Original von Gael Langevin






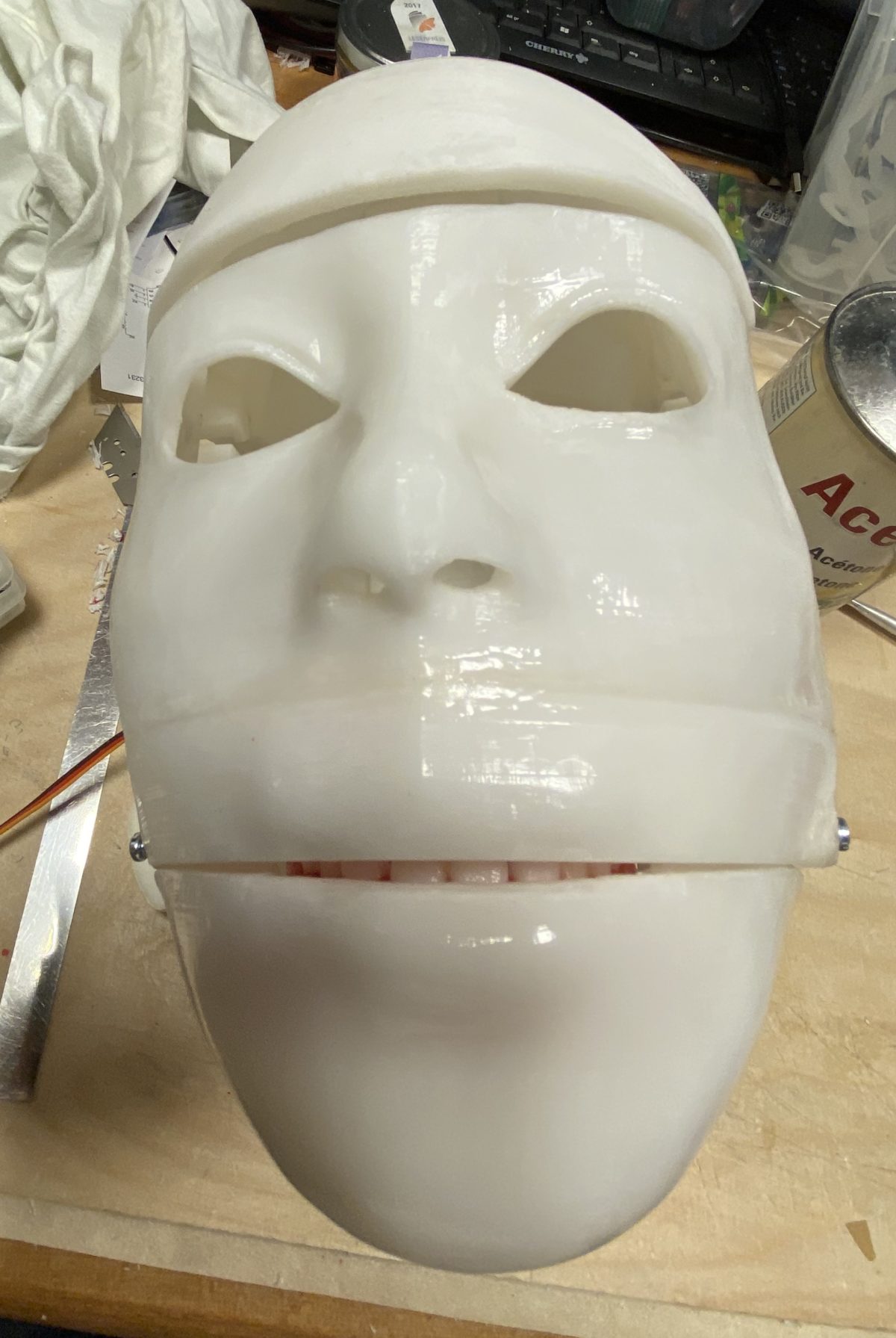
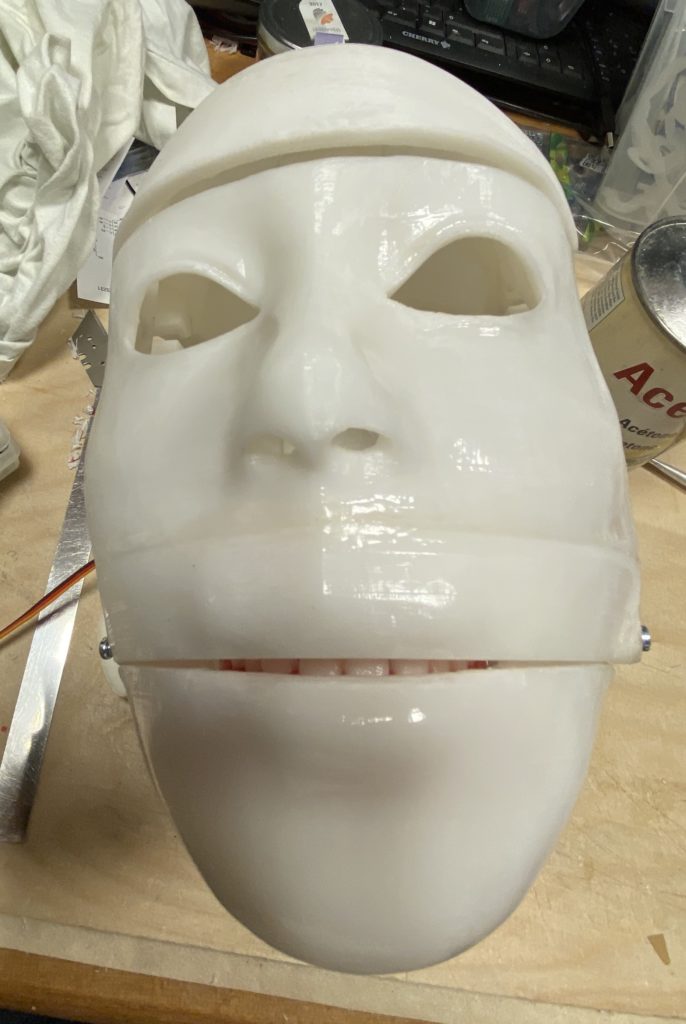
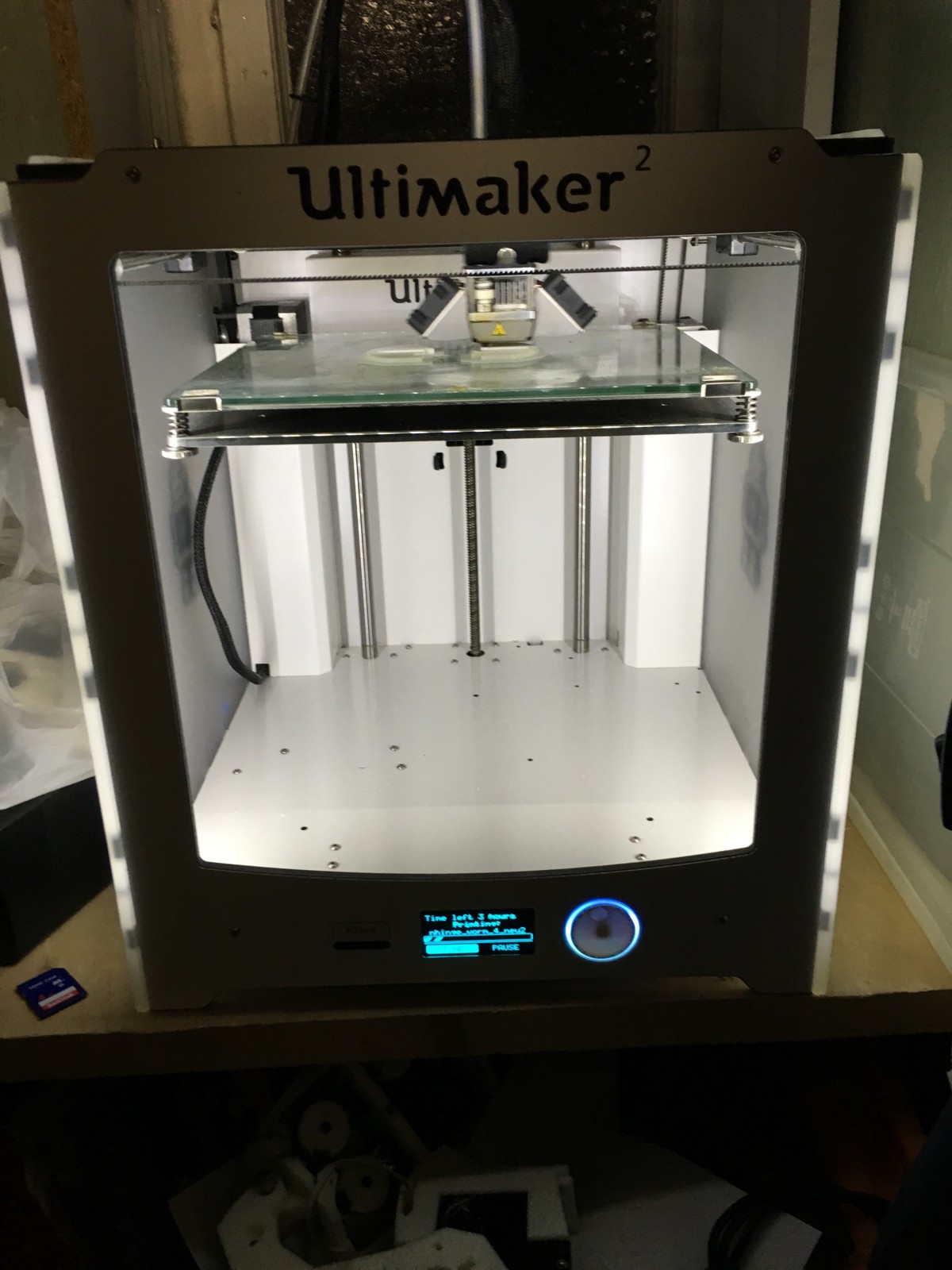
Meine ersten Druckergebnisse, die brauchbar sind

Alles begann damit das ich nach einem Objekt gesucht habe welches meinen Roboter Fantasien
nahekommt.
Dabei habe ich die Webseite inmoov.fr entdeckt.



{kind=link}